
一种滚筒式自动导引运输车.pdf

书生****瑞梦


1/7

2/7
3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种滚筒式自动导引运输车.pdf
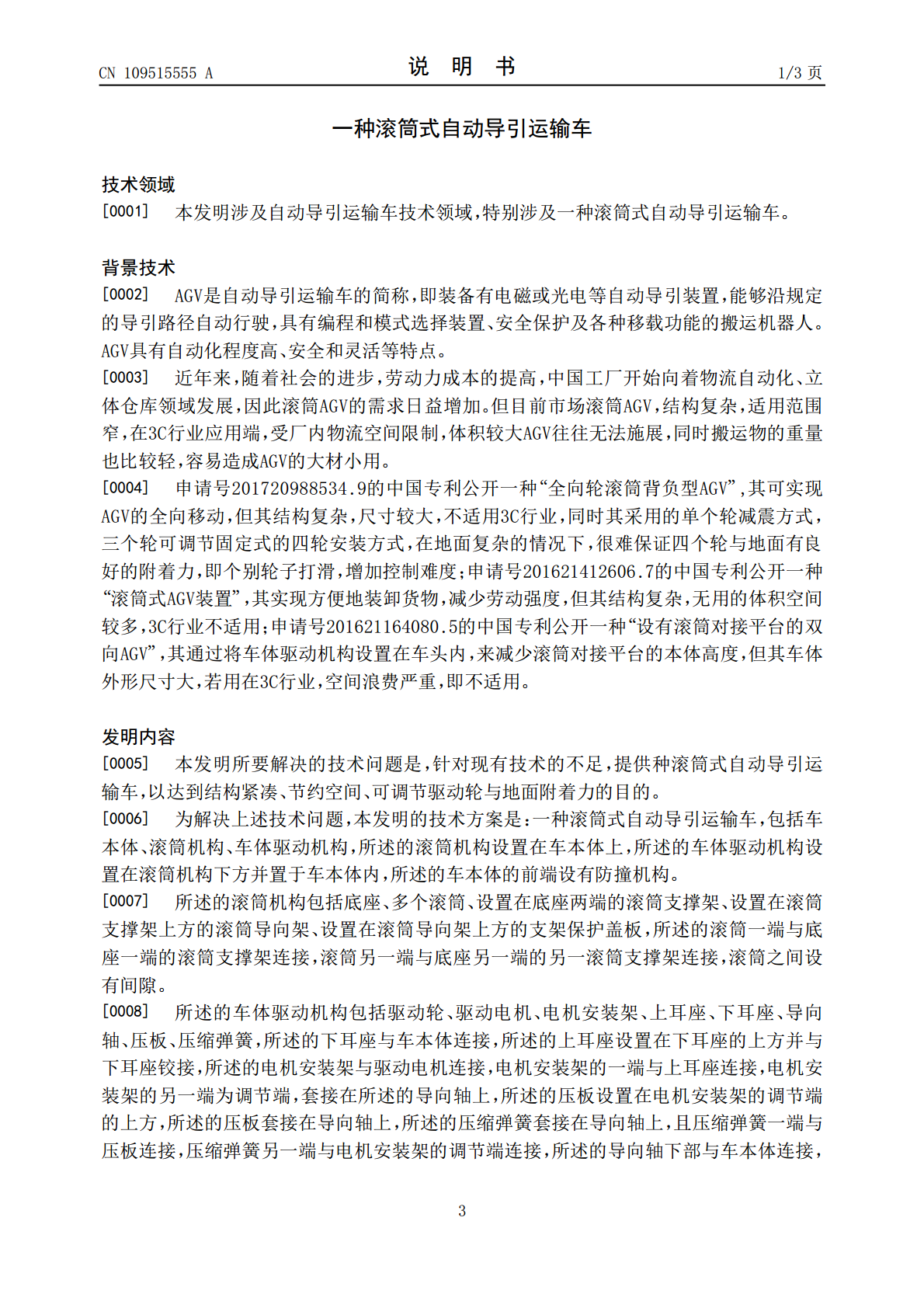
本发明公开了一种滚筒式自动导引运输车,包括车本体、滚筒机构、车体驱动机构,所述的滚筒机构设置在车本体上,所述的车体驱动机构设置在滚筒机构下方并置于车本体内,所述的车本体的前端设有防撞机构。本发明采用上述结构,具有以下优点:1、本发明采用一种铰链式悬挂,降低整车高度,且驱动轮与地面的附着力可调节;2、本发明配电动滚筒拖从动滚筒,节约滚筒驱动单元的结构空间,且其动力性能完全满足3C等轻载行业的使用;3、本发明结构简单、承载能力较强,且安装、维护方便,克服现有滚筒AGV空间、能量浪费的技术缺陷。
自动导引运输车底盘及自动导引运输车.pdf
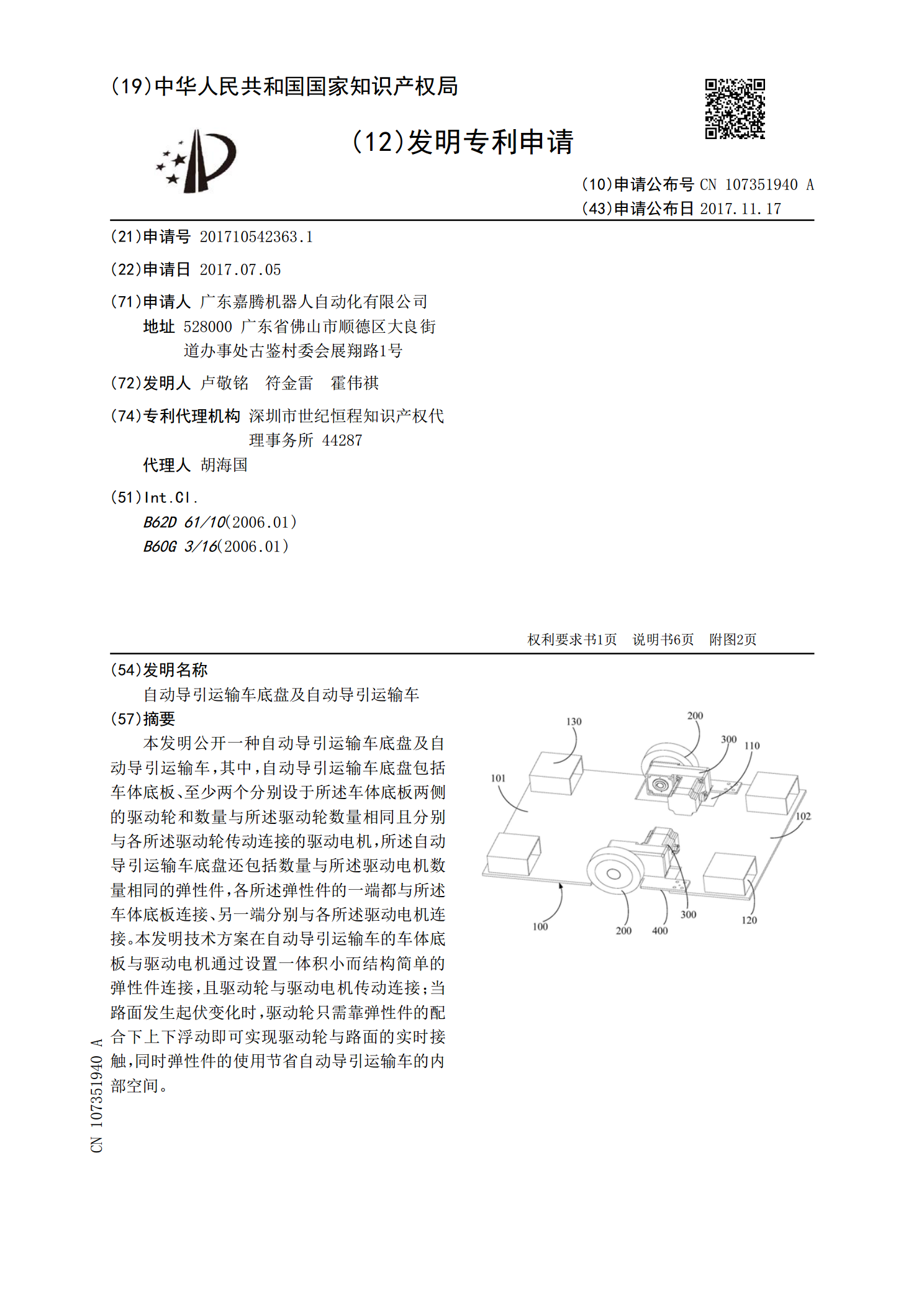
本发明公开一种自动导引运输车底盘及自动导引运输车,其中,自动导引运输车底盘包括车体底板、至少两个分别设于所述车体底板两侧的驱动轮和数量与所述驱动轮数量相同且分别与各所述驱动轮传动连接的驱动电机,所述自动导引运输车底盘还包括数量与所述驱动电机数量相同的弹性件,各所述弹性件的一端都与所述车体底板连接、另一端分别与各所述驱动电机连接。本发明技术方案在自动导引运输车的车体底板与驱动电机通过设置一体积小而结构简单的弹性件连接,且驱动轮与驱动电机传动连接;当路面发生起伏变化时,驱动轮只需靠弹性件的配合下上下浮动即可实

一种自动导引运输车及导引跟踪方法.pdf
本发明涉及一种运输车的导引跟踪技术,具体是指一种采用单个视觉加激光定位器从而实现精确沿线运行和调整运行姿态的自动导引运输车及导引跟踪方法,包括车身、控制器、轮毂电机和车轮,所述车轮(4)安装在轮毂电机上,所述轮毂电机安装在车身上,控制器(2)安装在车身(1)上且与轮毂电机(3)电连接,其特征在于:还包括两个一字型激光定位器(5)和一个视觉传感器(6),所述两个一字型激光定位器(5)相互平行并安装在车身(1)的中心线上且斜向下朝向地面,所述视觉传感器(6)安装在车身(1)上且位于两个一字型激光定位器(5)的

一种自动导引运输车.pdf
本发明提供一种应用于运输设备技术领域的自动导引运输车,所述的自动导引运输车的所述的运输车本体(1)靠近前端位置设置两个分别延伸到运输车本体(1)下表面位置的转向电机(4),每个转向电机(4)的电机转轴下端安装一个转向轮(5),每个转向电机(4)分别与供电电池(10)连接,运输车本体(1)的本体前端部(6)设置多个按间隙布置的前超声波传感器(7),运输车本体(1)的本体后端部(8)设置多个按间隙布置的后超声波传感器(9),本发明所述的自动导引运输车,能够全面对AGV在运输货物环境下的硬件设备进行优化,使AG

一种自动导引运输车.pdf
本发明实施例公开一种自动导引运输车,为提高地面适应能力而发明。所述自动导引运输车,在车体两侧设有第一车轮组件和第二车轮组件;第一车轮组件包括:第一连杆,第一车轮可转动地连接在第一连杆的一端,第二车轮可转动地连接在第一连杆的另一端,第一连杆通过两端之间的第一连接部可转动地连接在车体上;第二车轮组件包括:第二连杆,第三车轮可转动地连接在第二连杆的一端,第四车轮可转动地连接在第二连杆的另一端,第二连杆通过两端之间的第二连接部可转动地连接在车体上;第一车轮和第三车轮与驱动组件相连和/或第二车轮和第四车轮与驱动组件