
一种升降系统的负载平衡控制方法及控制装置.pdf

一条****涛k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种升降系统的负载平衡控制方法及控制装置.pdf
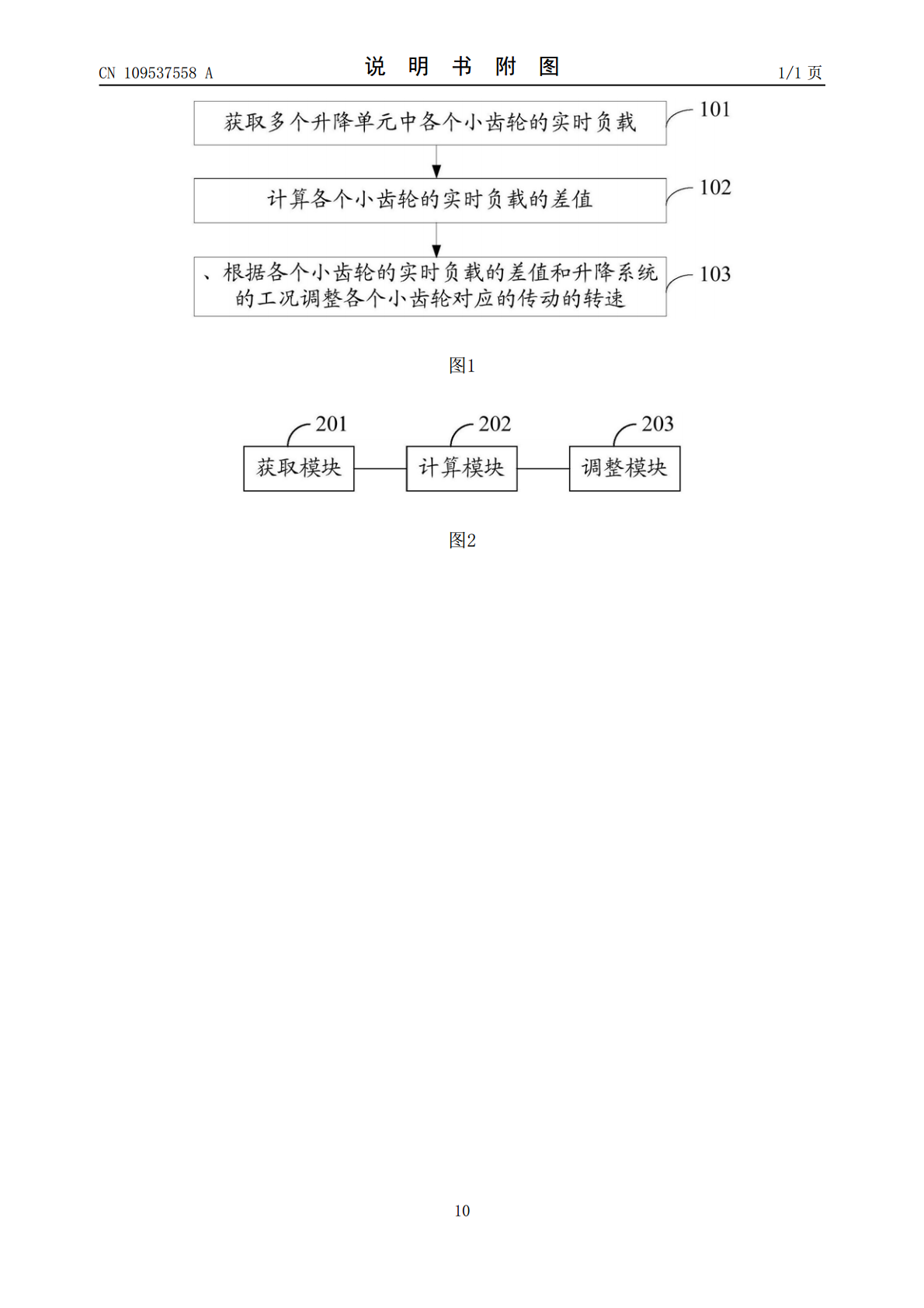
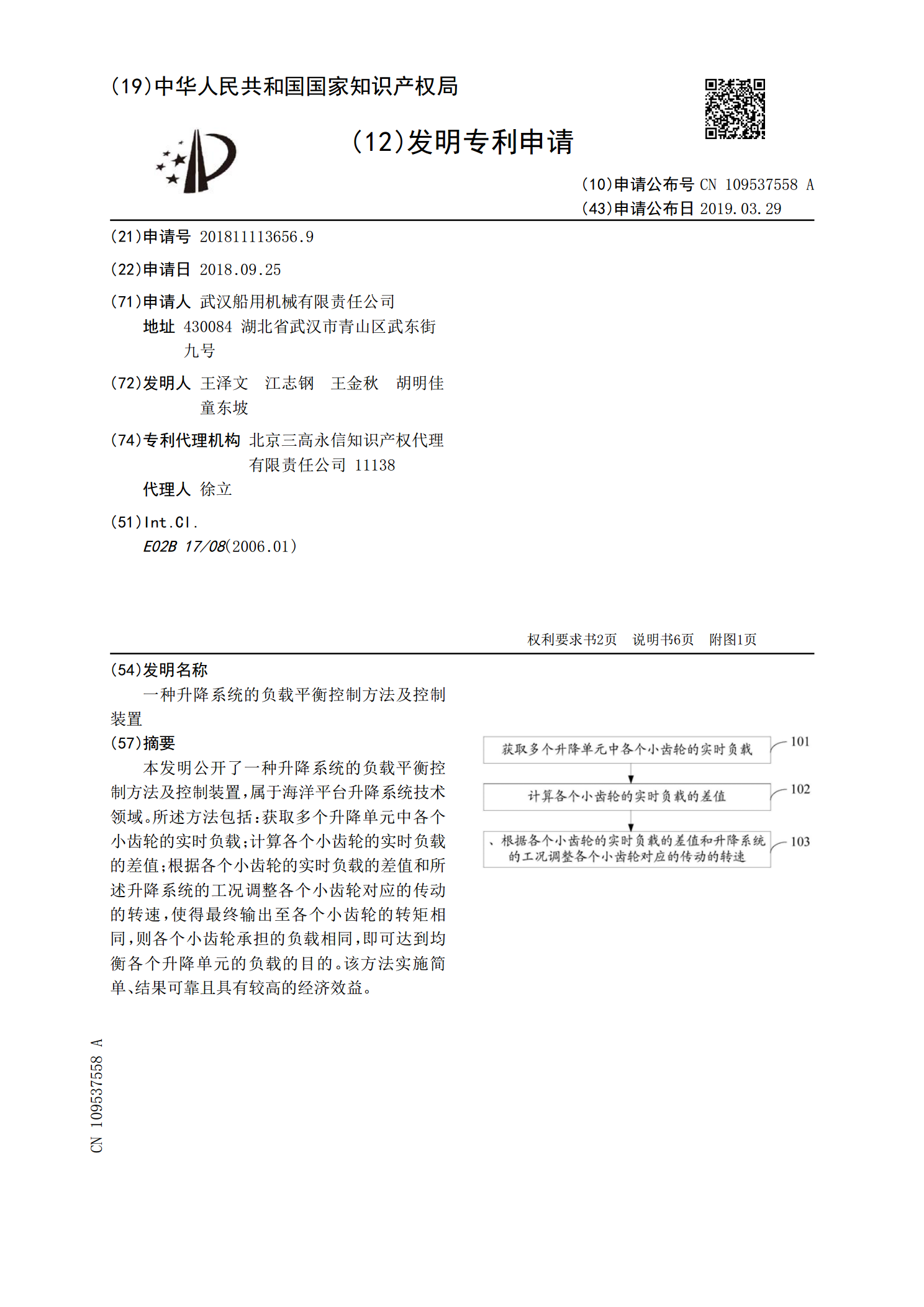
本发明公开了一种升降系统的负载平衡控制方法及控制装置,属于海洋平台升降系统技术领域。所述方法包括:获取多个升降单元中各个小齿轮的实时负载;计算各个小齿轮的实时负载的差值;根据各个小齿轮的实时负载的差值和所述升降系统的工况调整各个小齿轮对应的传动的转速,使得最终输出至各个小齿轮的转矩相同,则各个小齿轮承担的负载相同,即可达到均衡各个升降单元的负载的目的。该方法实施简单、结果可靠且具有较高的经济效益。
升降系统的控制装置及控制方法.pdf
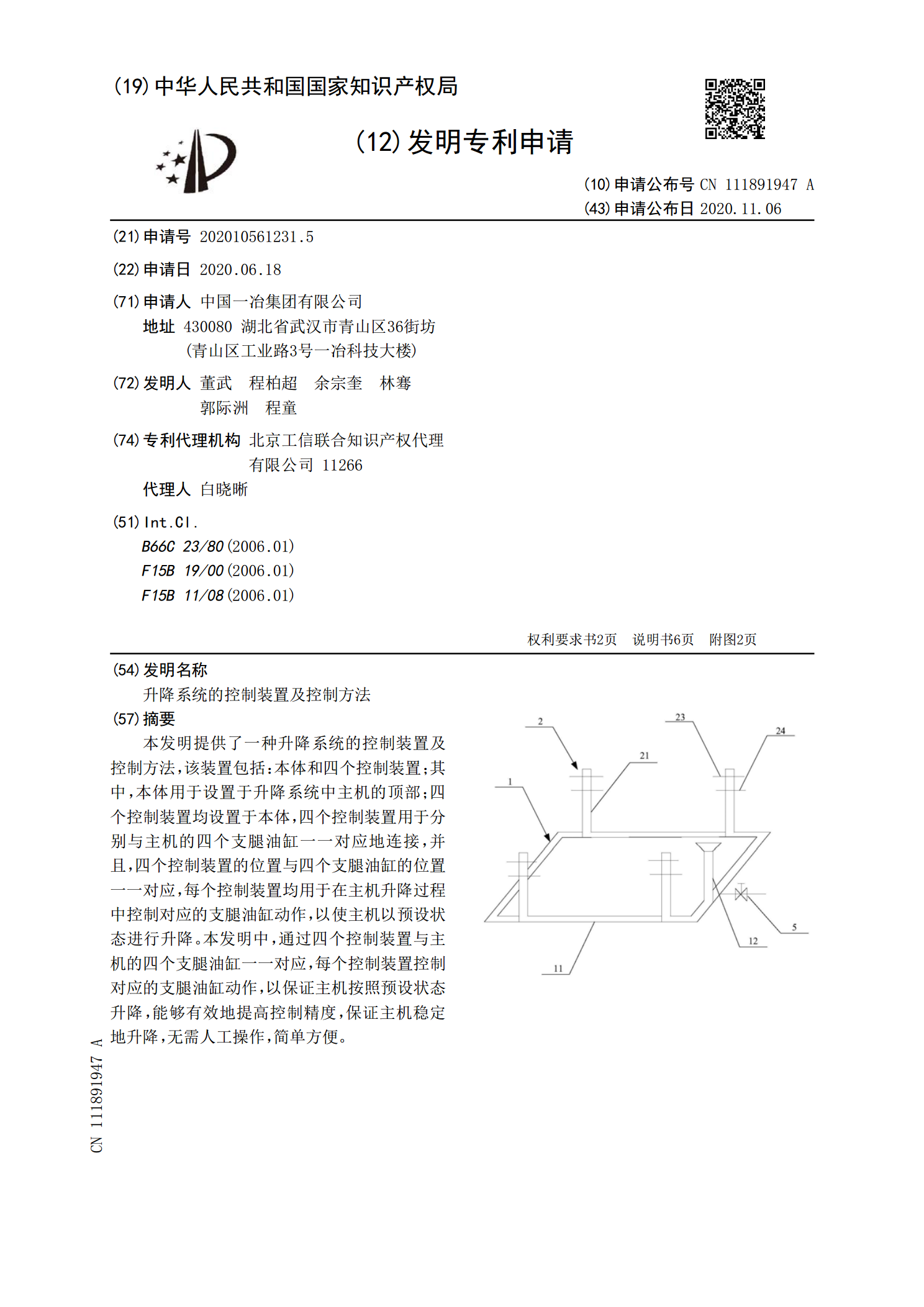
本发明提供了一种升降系统的控制装置及控制方法,该装置包括:本体和四个控制装置;其中,本体用于设置于升降系统中主机的顶部;四个控制装置均设置于本体,四个控制装置用于分别与主机的四个支腿油缸一一对应地连接,并且,四个控制装置的位置与四个支腿油缸的位置一一对应,每个控制装置均用于在主机升降过程中控制对应的支腿油缸动作,以使主机以预设状态进行升降。本发明中,通过四个控制装置与主机的四个支腿油缸一一对应,每个控制装置控制对应的支腿油缸动作,以保证主机按照预设状态升降,能够有效地提高控制精度,保证主机稳定地升降,无需

一种齿轮齿条升降系统的控制方法及控制装置.pdf
本发明公开了一种齿轮齿条升降系统的控制方法及控制装置,属于海洋平台齿轮齿条升降系统领域。所述方法包括:获得多个液压马达的进油口压力P1和多个液压制动器的压力P2;根据当前海洋平台的工况计算每条所述桩腿的负载F;比较每条所述桩腿的负载F,获得所有所述负载F中的最大值和最小值的差值ΔF;当差值ΔF超过设定值时,则控制齿轮齿条升降系统停止工作。所述控制装置包括:获取模块、桩腿负载确定模块和控制模块。该方法结果可靠、实施简单。该装置能够准确的检测出桩腿负载是否平衡,且结构简单。

一种可升降的载片装置以及升降控制方法.pdf
本申请公开了一种可升降的载片装置以及升降控制方法,所述可升降的载片装置包括载片台、驱动组件、顶针组件、升降组件。本申请提供了一种可升降的载片装置以及升降控制方法,该载片装置中载片台的高度可以根据实际工艺需求进行灵活调节以实现单腔体多工艺的兼容,能有效提高生产效率以及节省设备购买成本,另外,该装置还可以实现单腔体不同层不同材料的刻蚀,在各层切换时,调节各层材料的最佳工艺位置,提高刻蚀均匀性。
升降机控制装置以及升降机控制方法.pdf
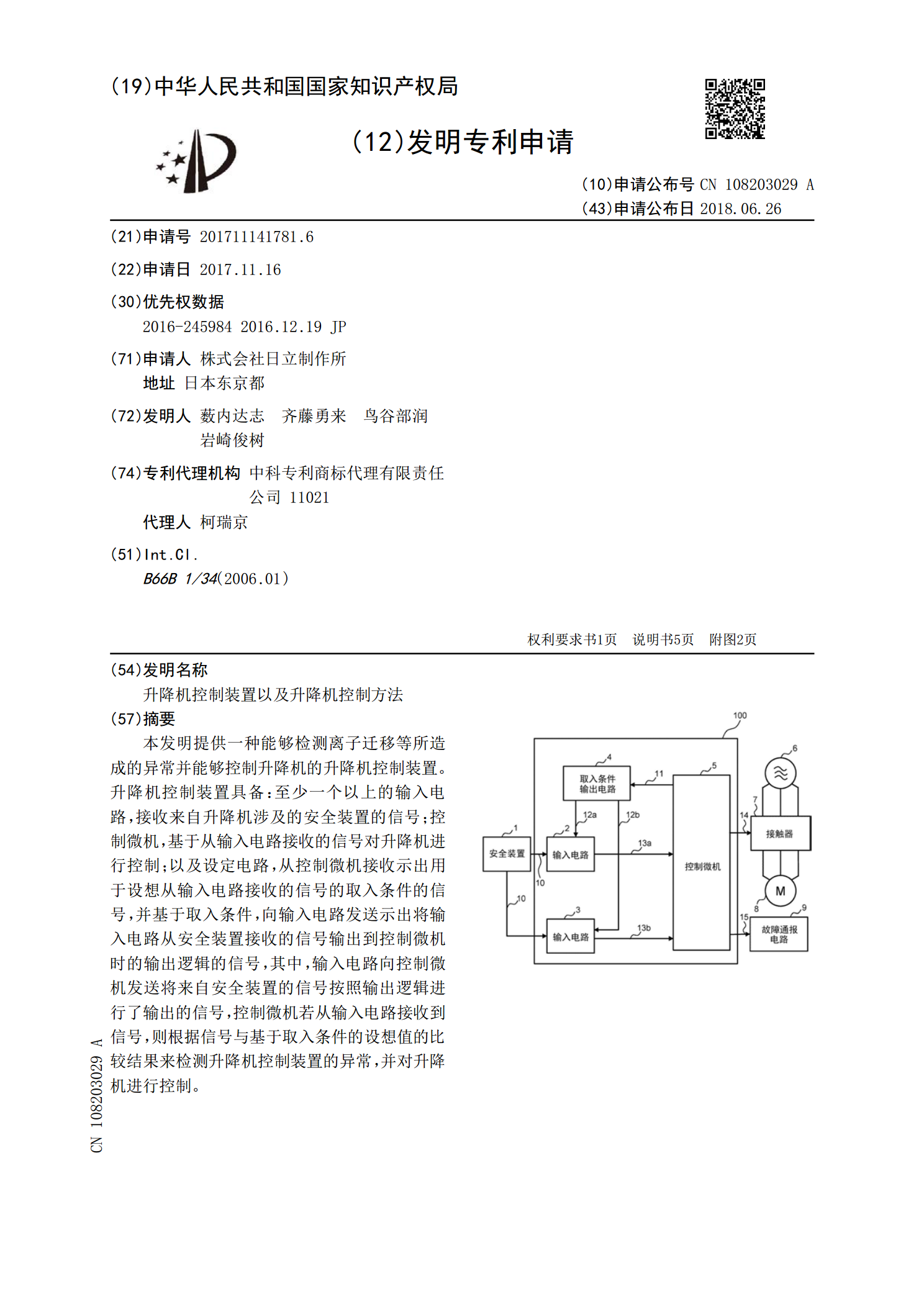
本发明提供一种能够检测离子迁移等所造成的异常并能够控制升降机的升降机控制装置。升降机控制装置具备:至少一个以上的输入电路,接收来自升降机涉及的安全装置的信号;控制微机,基于从输入电路接收的信号对升降机进行控制;以及设定电路,从控制微机接收示出用于设想从输入电路接收的信号的取入条件的信号,并基于取入条件,向输入电路发送示出将输入电路从安全装置接收的信号输出到控制微机时的输出逻辑的信号,其中,输入电路向控制微机发送将来自安全装置的信号按照输出逻辑进行了输出的信号,控制微机若从输入电路接收到信号,则根据信号与基