
一种水下探测球形变形机器人.pdf

觅松****哥哥

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下探测球形变形机器人.pdf
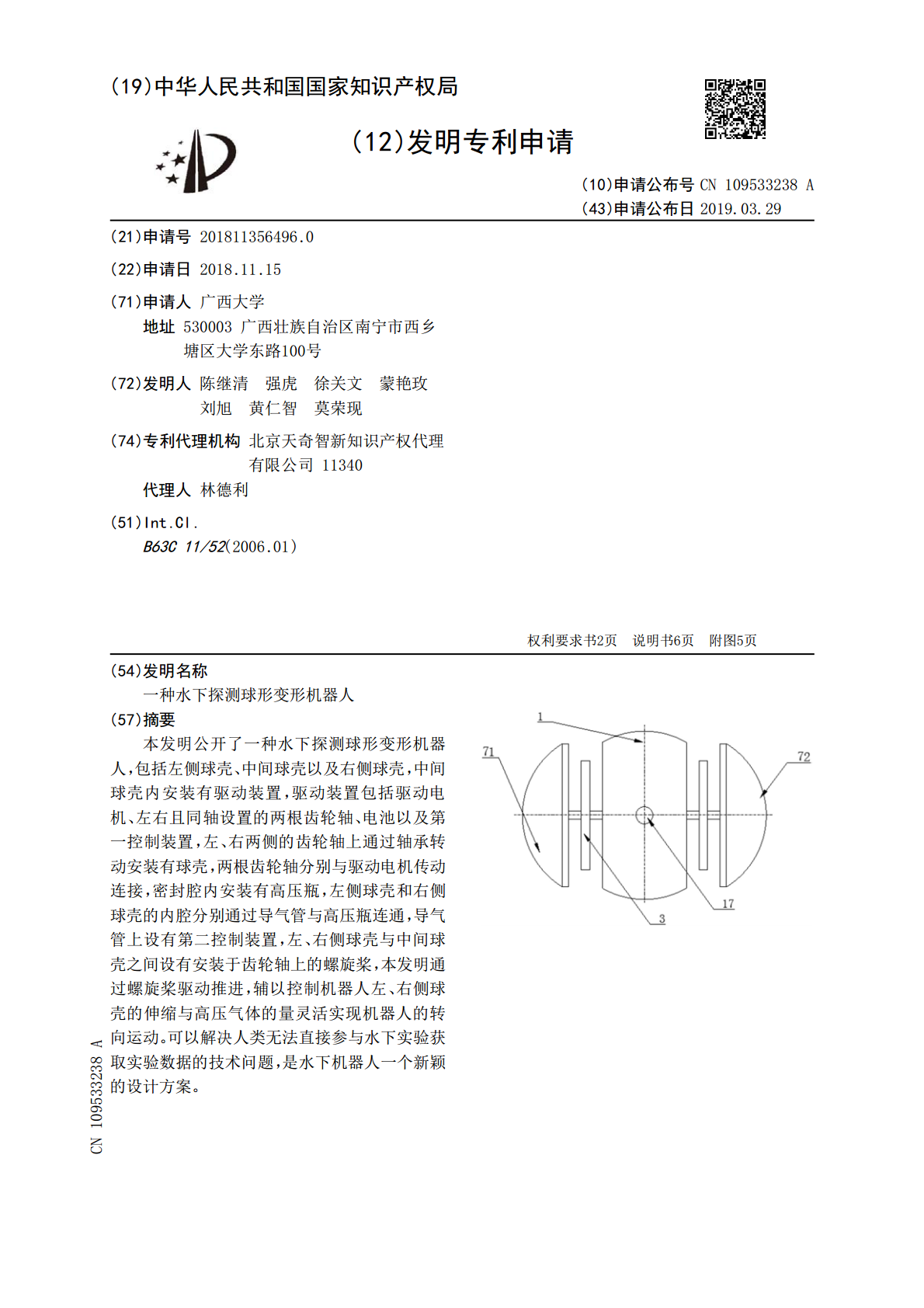
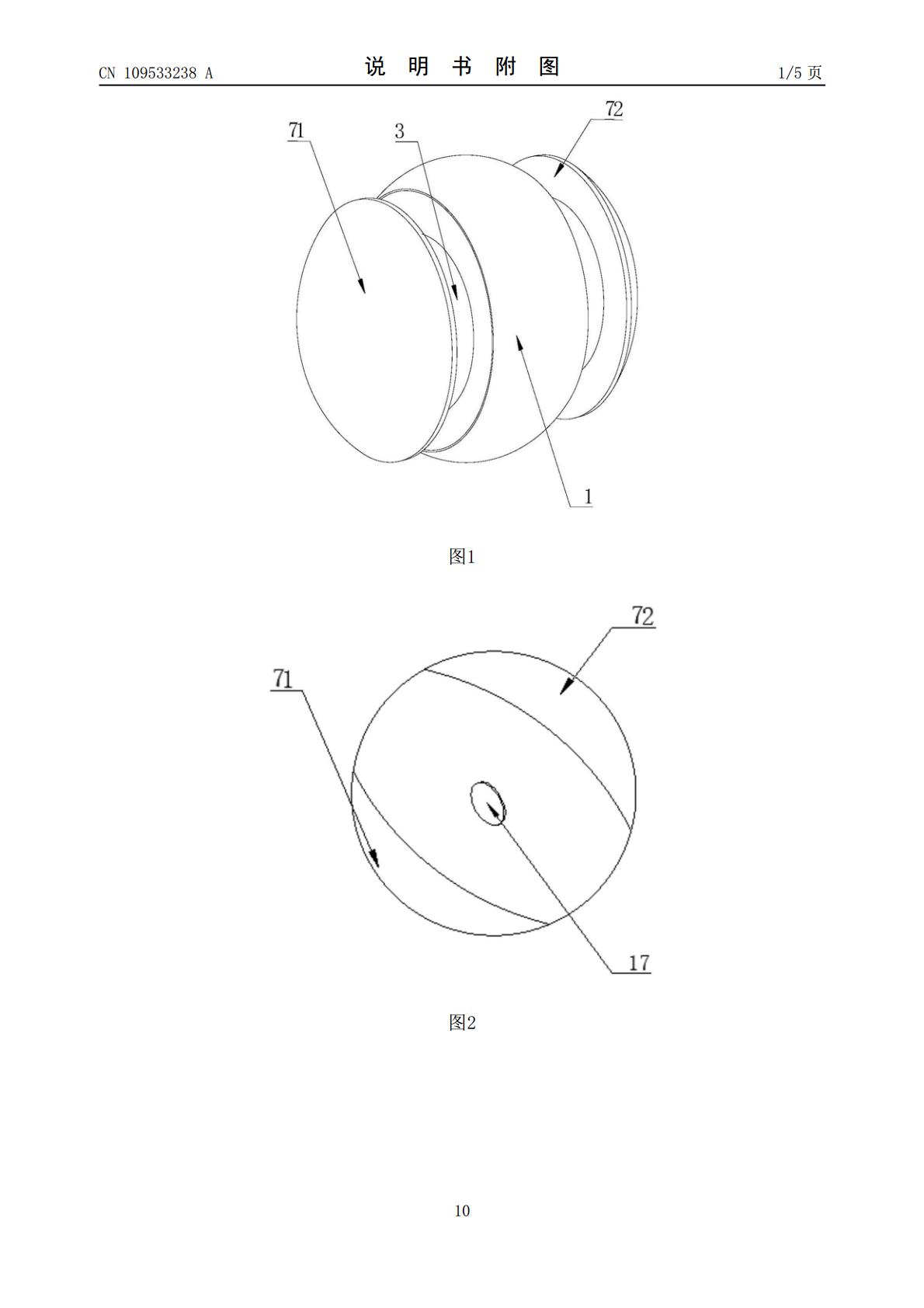
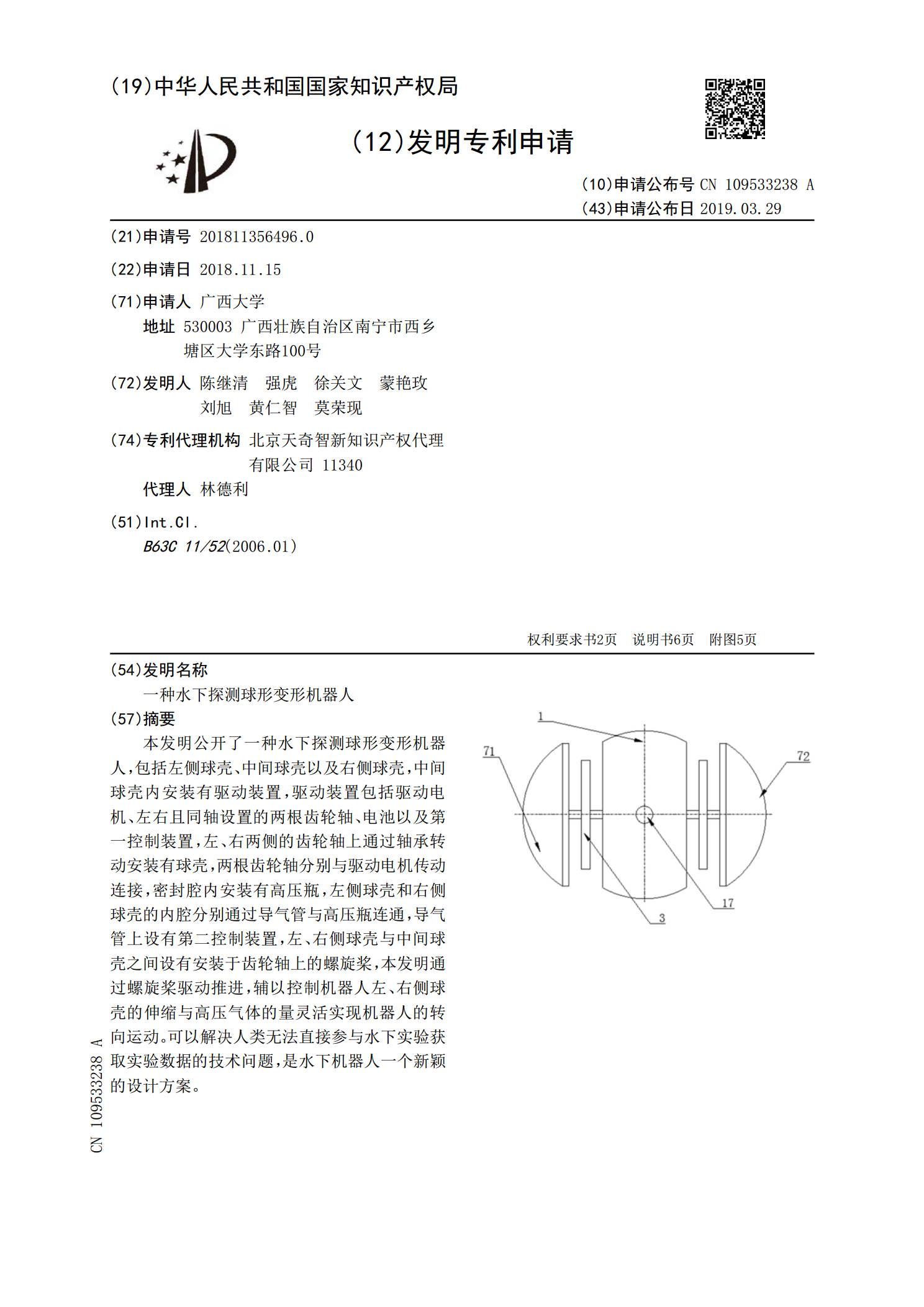
本发明公开了一种水下探测球形变形机器人,包括左侧球壳、中间球壳以及右侧球壳,中间球壳内安装有驱动装置,驱动装置包括驱动电机、左右且同轴设置的两根齿轮轴、电池以及第一控制装置,左、右两侧的齿轮轴上通过轴承转动安装有球壳,两根齿轮轴分别与驱动电机传动连接,密封腔内安装有高压瓶,左侧球壳和右侧球壳的内腔分别通过导气管与高压瓶连通,导气管上设有第二控制装置,左、右侧球壳与中间球壳之间设有安装于齿轮轴上的螺旋桨,本发明通过螺旋桨驱动推进,辅以控制机器人左、右侧球壳的伸缩与高压气体的量灵活实现机器人的转向运动。可以解
一种水下球形机器人.pdf
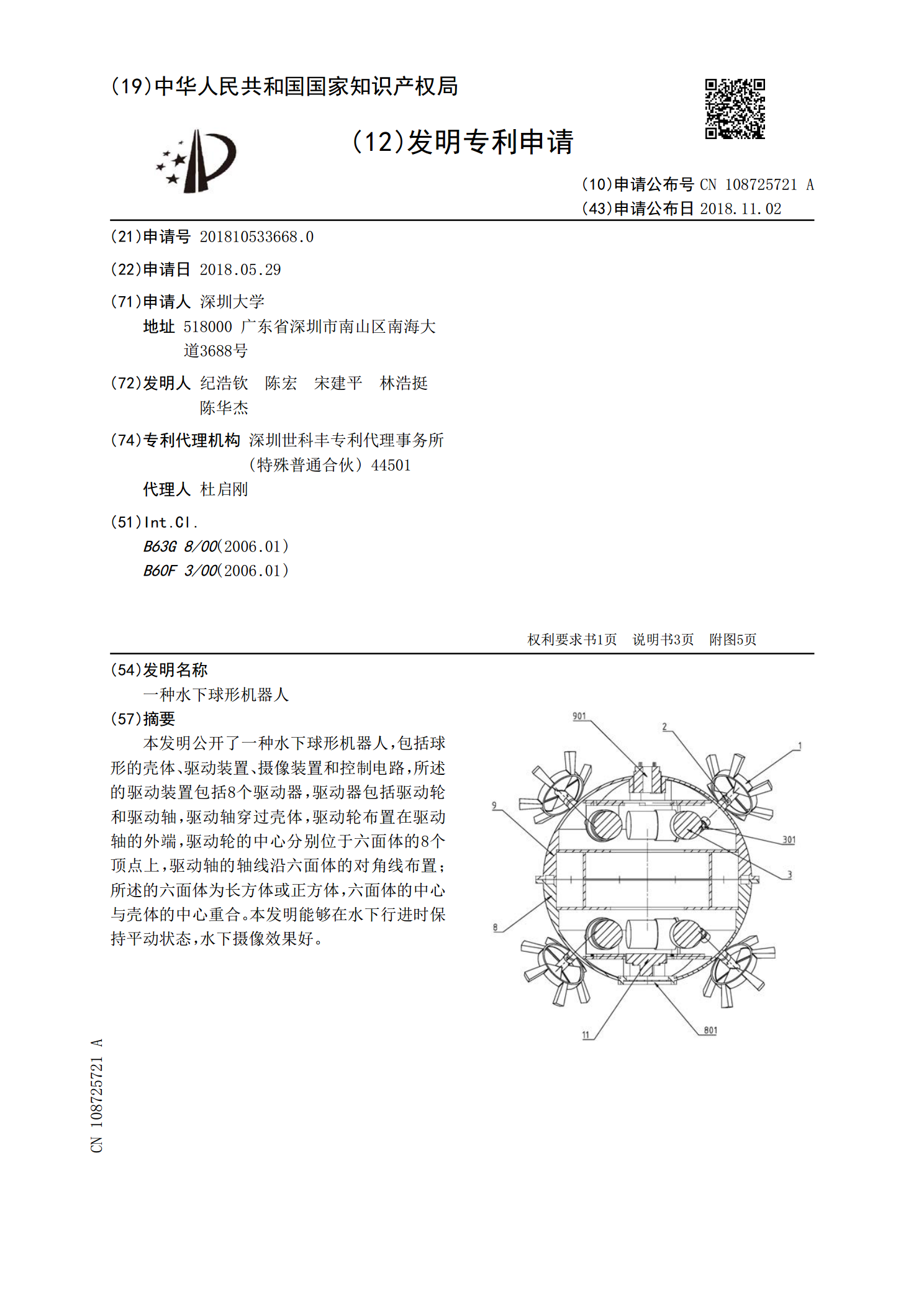
本发明公开了一种水下球形机器人,包括球形的壳体、驱动装置、摄像装置和控制电路,所述的驱动装置包括8个驱动器,驱动器包括驱动轮和驱动轴,驱动轴穿过壳体,驱动轮布置在驱动轴的外端,驱动轮的中心分别位于六面体的8个顶点上,驱动轴的轴线沿六面体的对角线布置;所述的六面体为长方体或正方体,六面体的中心与壳体的中心重合。本发明能够在水下行进时保持平动状态,水下摄像效果好。
一种可变形的球形探测装置.pdf
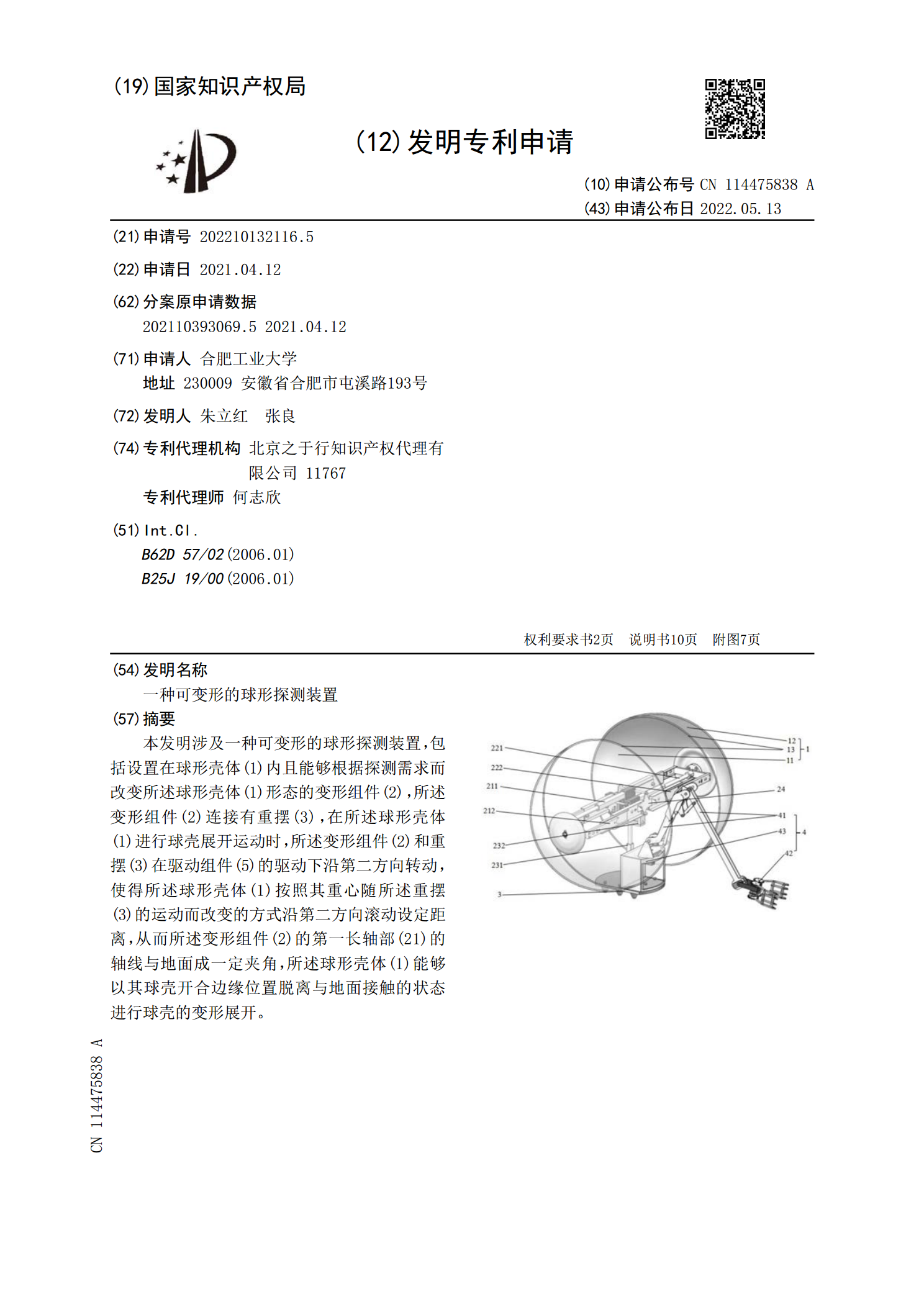
本发明涉及一种可变形的球形探测装置,包括设置在球形壳体(1)内且能够根据探测需求而改变所述球形壳体(1)形态的变形组件(2),所述变形组件(2)连接有重摆(3),在所述球形壳体(1)进行球壳展开运动时,所述变形组件(2)和重摆(3)在驱动组件(5)的驱动下沿第二方向转动,使得所述球形壳体(1)按照其重心随所述重摆(3)的运动而改变的方式沿第二方向滚动设定距离,从而所述变形组件(2)的第一长轴部(21)的轴线与地面成一定夹角,所述球形壳体(1)能够以其球壳开合边缘位置脱离与地面接触的状态进行球壳的变形展开。
一种球形水下机器人.pdf
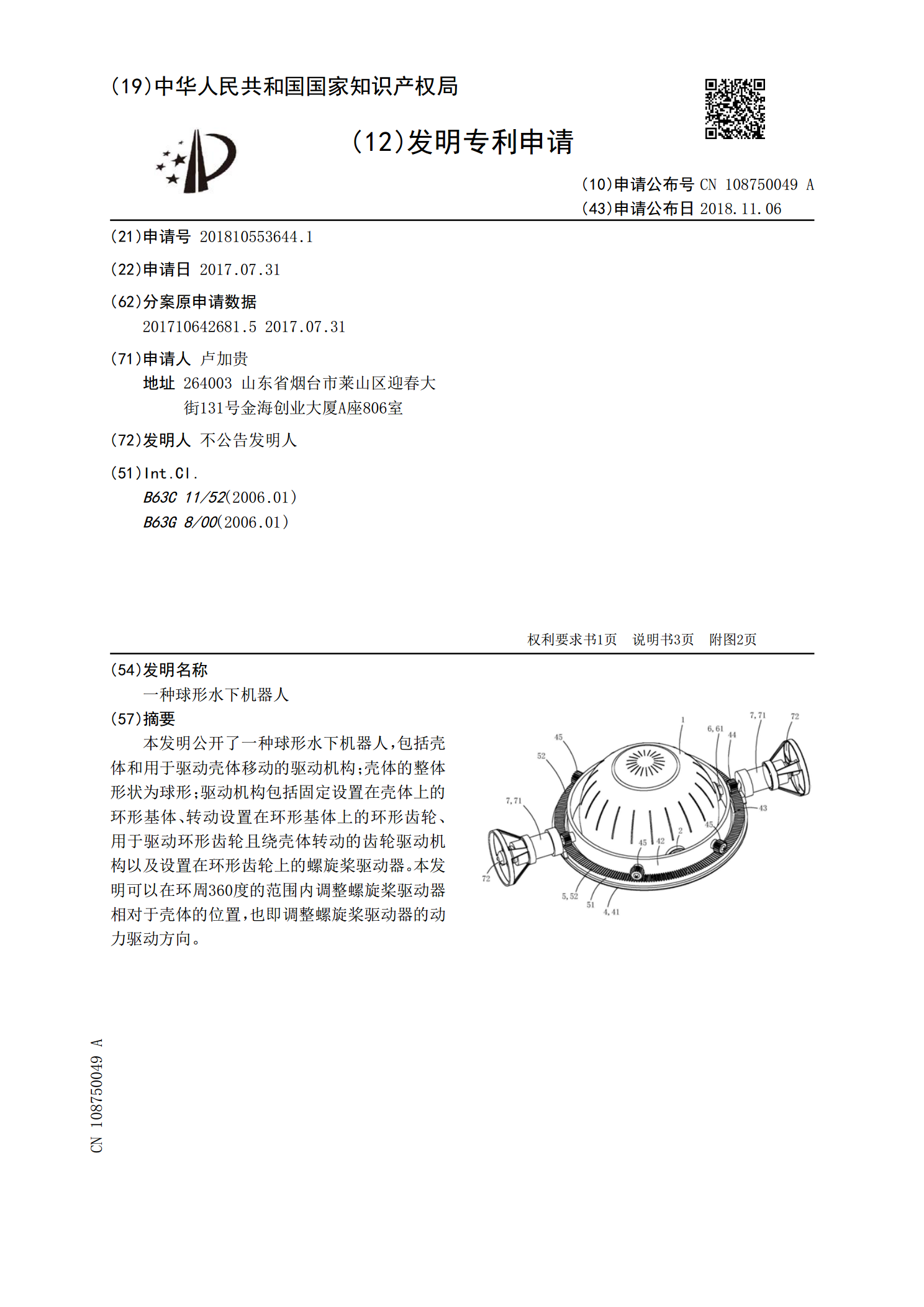
本发明公开了一种球形水下机器人,包括壳体和用于驱动壳体移动的驱动机构;壳体的整体形状为球形;驱动机构包括固定设置在壳体上的环形基体、转动设置在环形基体上的环形齿轮、用于驱动环形齿轮且绕壳体转动的齿轮驱动机构以及设置在环形齿轮上的螺旋桨驱动器。本发明可以在环周360度的范围内调整螺旋桨驱动器相对于壳体的位置,也即调整螺旋桨驱动器的动力驱动方向。
球形水下机器人.pdf
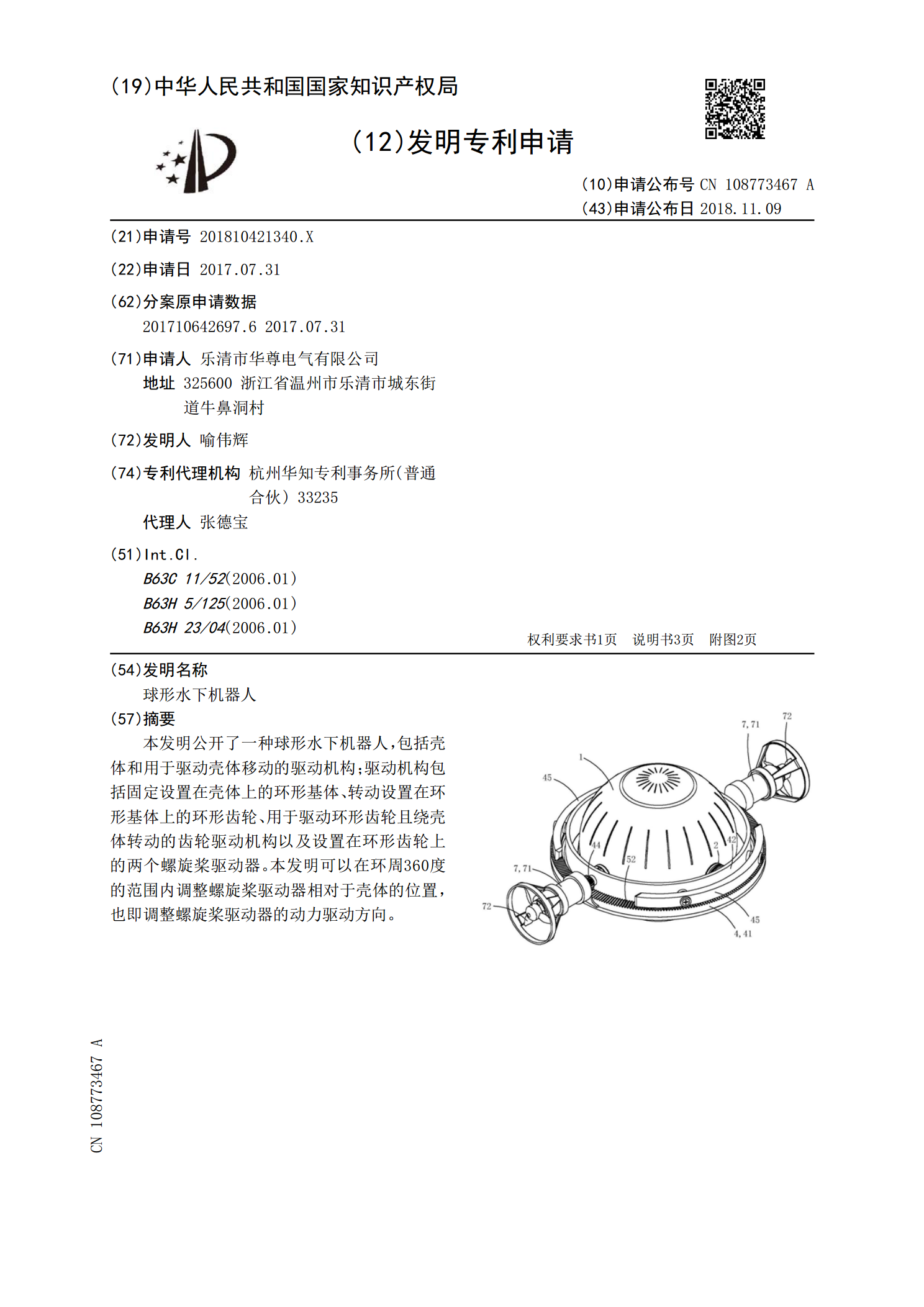
本发明公开了一种球形水下机器人,包括壳体和用于驱动壳体移动的驱动机构;驱动机构包括固定设置在壳体上的环形基体、转动设置在环形基体上的环形齿轮、用于驱动环形齿轮且绕壳体转动的齿轮驱动机构以及设置在环形齿轮上的两个螺旋桨驱动器。本发明可以在环周360度的范围内调整螺旋桨驱动器相对于壳体的位置,也即调整螺旋桨驱动器的动力驱动方向。