
恒扭矩轮式越障机器人.pdf

葫芦****io

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

恒扭矩轮式越障机器人.pdf
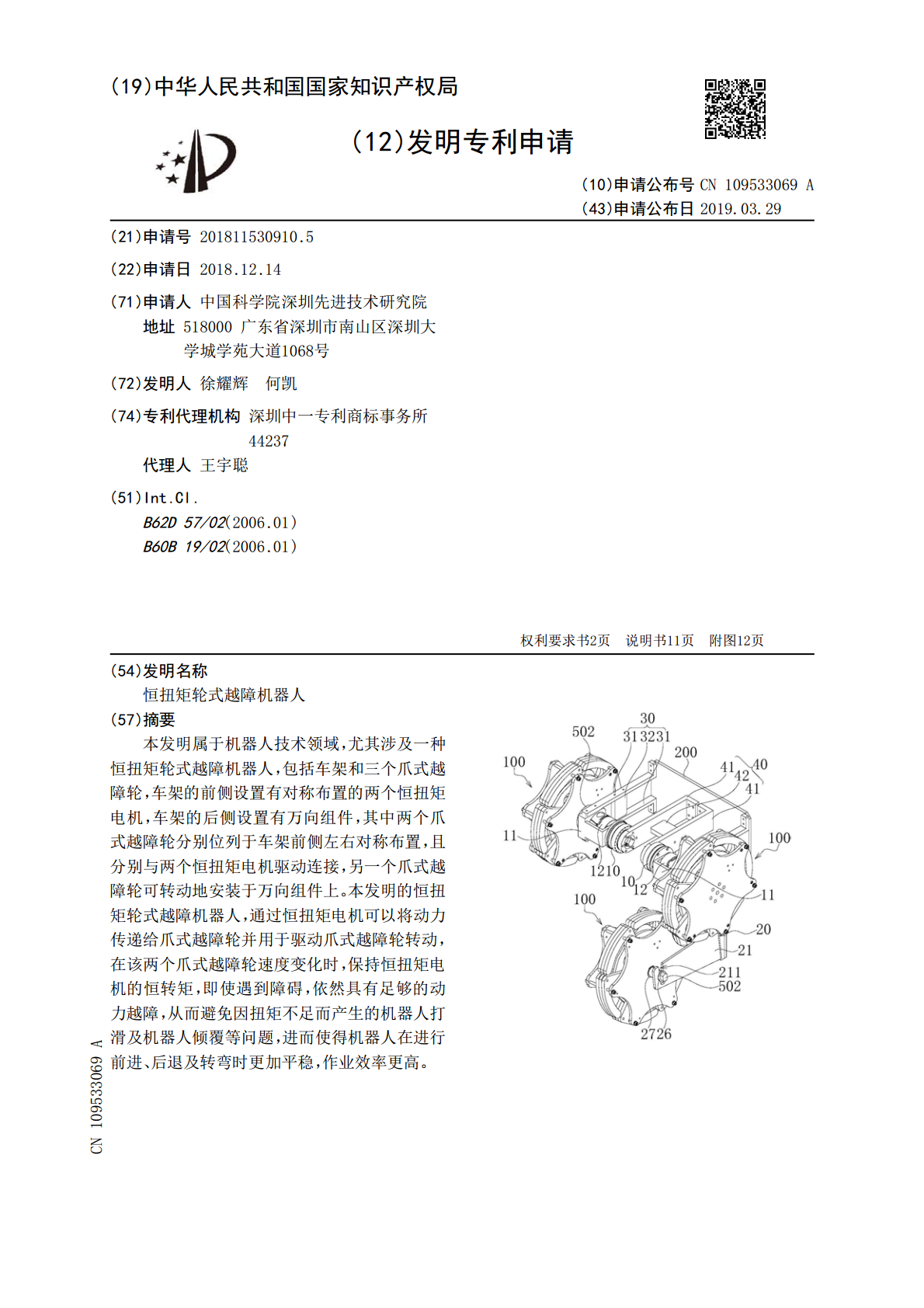
本发明属于机器人技术领域,尤其涉及一种恒扭矩轮式越障机器人,包括车架和三个爪式越障轮,车架的前侧设置有对称布置的两个恒扭矩电机,车架的后侧设置有万向组件,其中两个爪式越障轮分别位列于车架前侧左右对称布置,且分别与两个恒扭矩电机驱动连接,另一个爪式越障轮可转动地安装于万向组件上。本发明的恒扭矩轮式越障机器人,通过恒扭矩电机可以将动力传递给爪式越障轮并用于驱动爪式越障轮转动,在该两个爪式越障轮速度变化时,保持恒扭矩电机的恒转矩,即使遇到障碍,依然具有足够的动力越障,从而避免因扭矩不足而产生的机器人打滑及机器人

轮式越障爬壁机器人.pdf
一种机器人技术领域的轮式越障爬壁机器人,包括:机器人车架、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的问题,机器人既具有轮式移动机器人速度快和转向灵活、履带式移动机器人磁吸附力大的特点,同时还具有好的越障能力,能满足在复杂环境中运动和作业的需求。

辅助轮式升降越障机器人.pdf
本发明公开了一种辅助轮式升降越障机器人,包括车架,车架于前端的两侧部装设有两个前驱动轮,车架于后端的两侧部装设有两个后驱动轮,车架于前后端的两侧部还分别装设有两个前辅助轮和两个后辅助轮,前辅助轮和后辅助轮位于前驱动轮和后驱动轮之间,车架上装设有导向支撑架,导向支撑架的前后端均装设有可独立升降和行进的升降行进机构,前端的升降行进机构位于前驱动轮和前辅助轮之间,后端的升降行进机构位于后辅助轮和后驱动轮之间。通过前后升降行进机构的配合可将车架撑起或者放下,以实现上下台阶的功能。该越障机器人具有结构简单,成本低廉

一种轮式越障机器人.pdf
本发明公开了一种轮式越障机器人。所述轮式越障机器人包括:支架、越障轮、越障轮安装架、越障轮驱动机构、越障轮转向驱动机构、第一行走轮、第一行走轮转向驱动机构、第二行走轮、第二行走轮转向驱动机构和两个行走轮驱动机构,支架包括:第一支管、第二支管和第三支管,第一支管和第二支管相对布置在第一平面内,第三支管的一端安装在第一支管上。在有障碍、沟壑或台阶的路况下,越障轮安装架通过转轴相对于支架进行转动,越障轮跟随越障轮安装架转动并越过障碍物、沟壑或越至台阶顶面,通过越障轮驱动机构驱动越障轮转动,与第一行走轮或第一行走
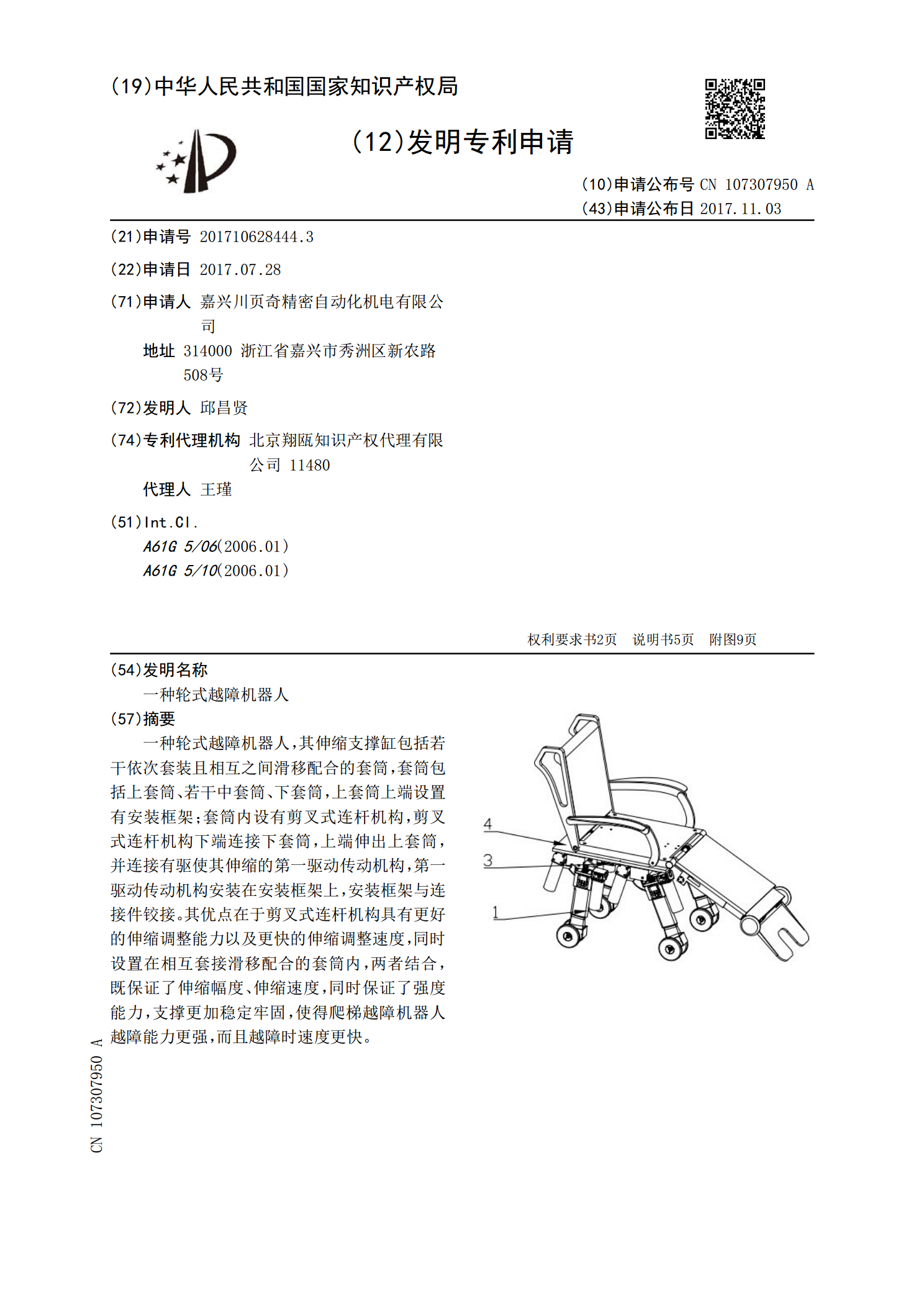
一种轮式越障机器人.pdf
一种轮式越障机器人,其伸缩支撑缸包括若干依次套装且相互之间滑移配合的套筒,套筒包括上套筒、若干中套筒、下套筒,上套筒上端设置有安装框架;套筒内设有剪叉式连杆机构,剪叉式连杆机构下端连接下套筒,上端伸出上套筒,并连接有驱使其伸缩的第一驱动传动机构,第一驱动传动机构安装在安装框架上,安装框架与连接件铰接。其优点在于剪叉式连杆机构具有更好的伸缩调整能力以及更快的伸缩调整速度,同时设置在相互套接滑移配合的套筒内,两者结合,既保证了伸缩幅度、伸缩速度,同时保证了强度能力,支撑更加稳定牢固,使得爬梯越障机器人越障能力