
履带式爬楼梯机器人.pdf

元枫****文章


1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

履带式爬楼梯机器人.pdf
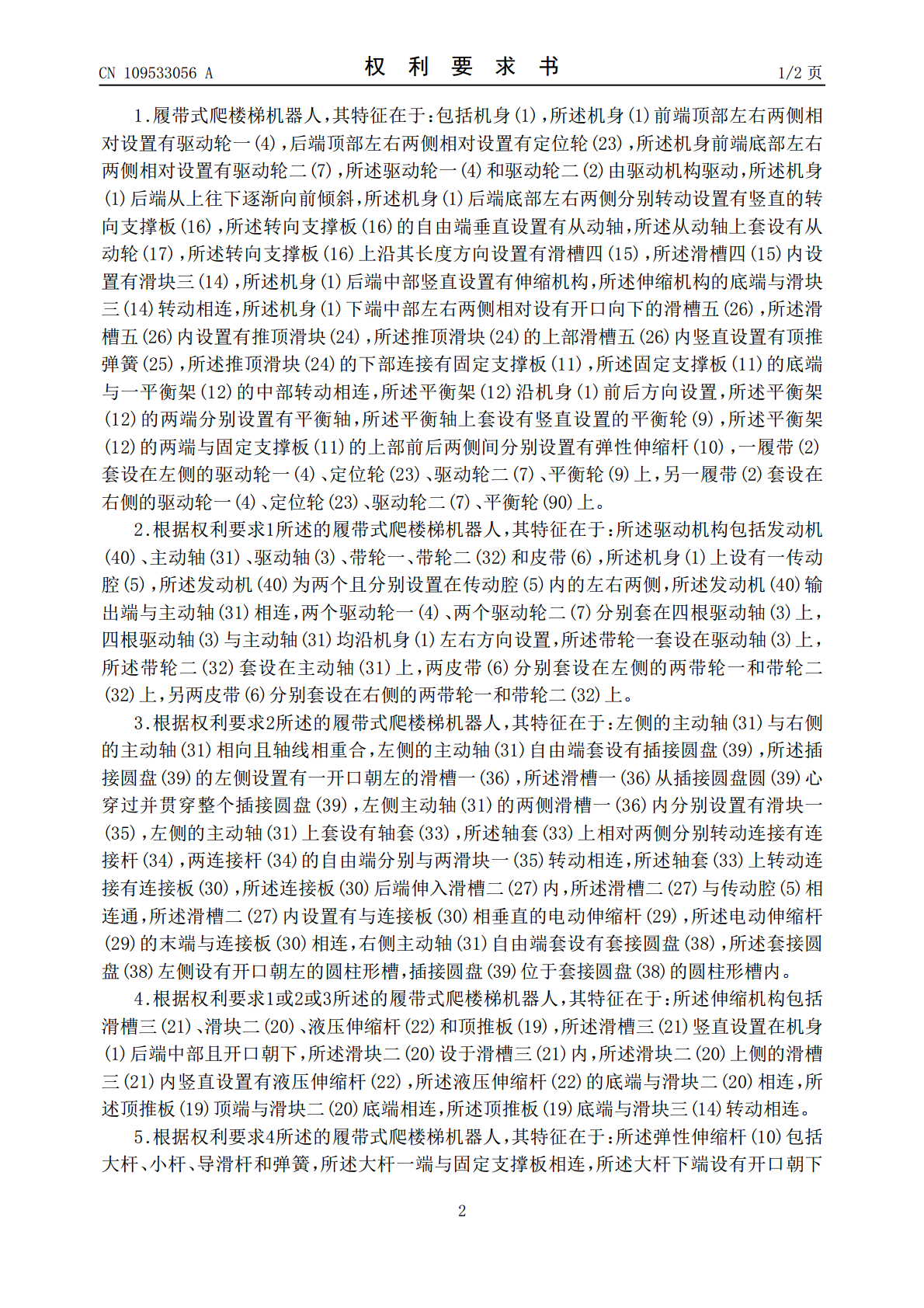
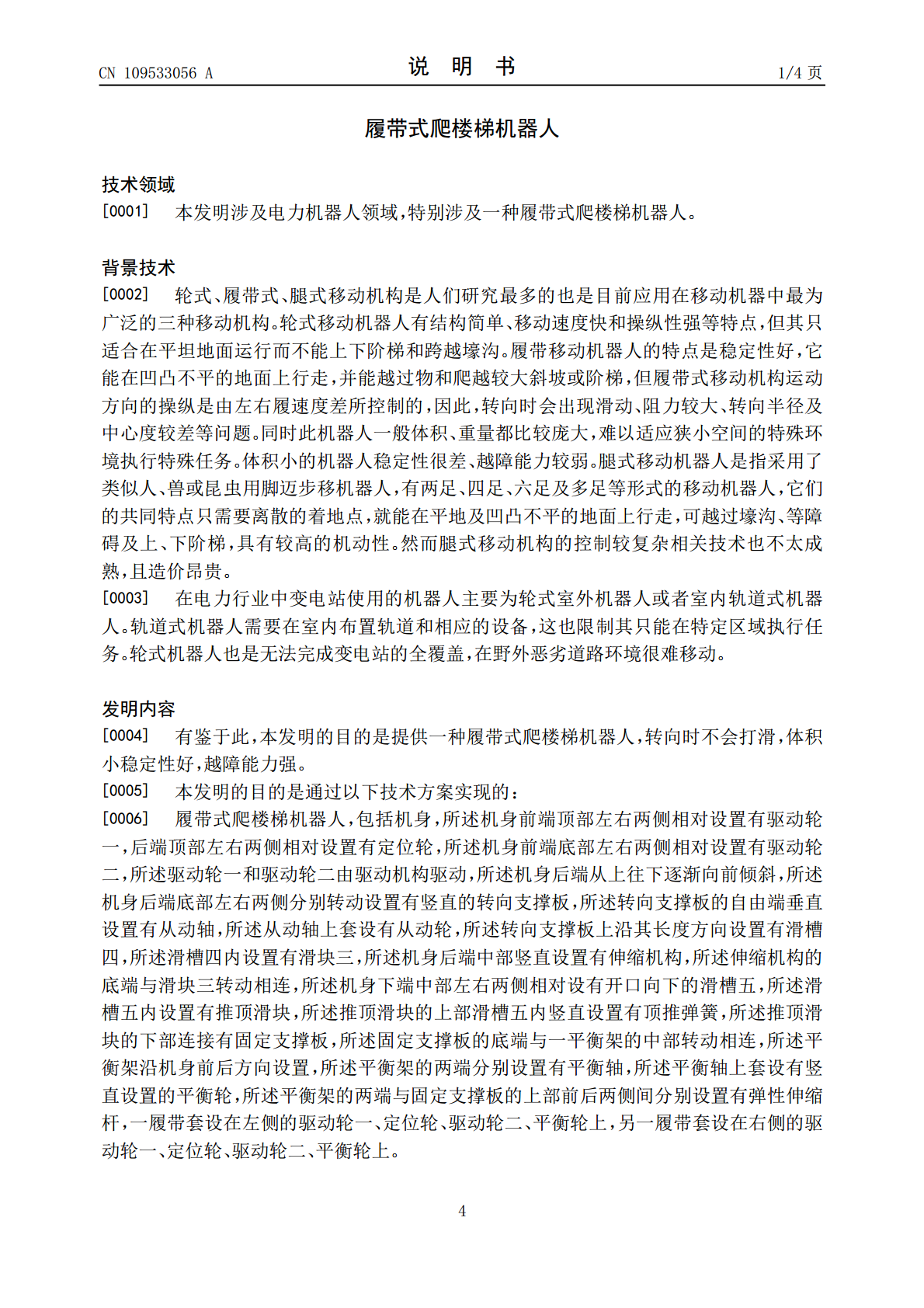
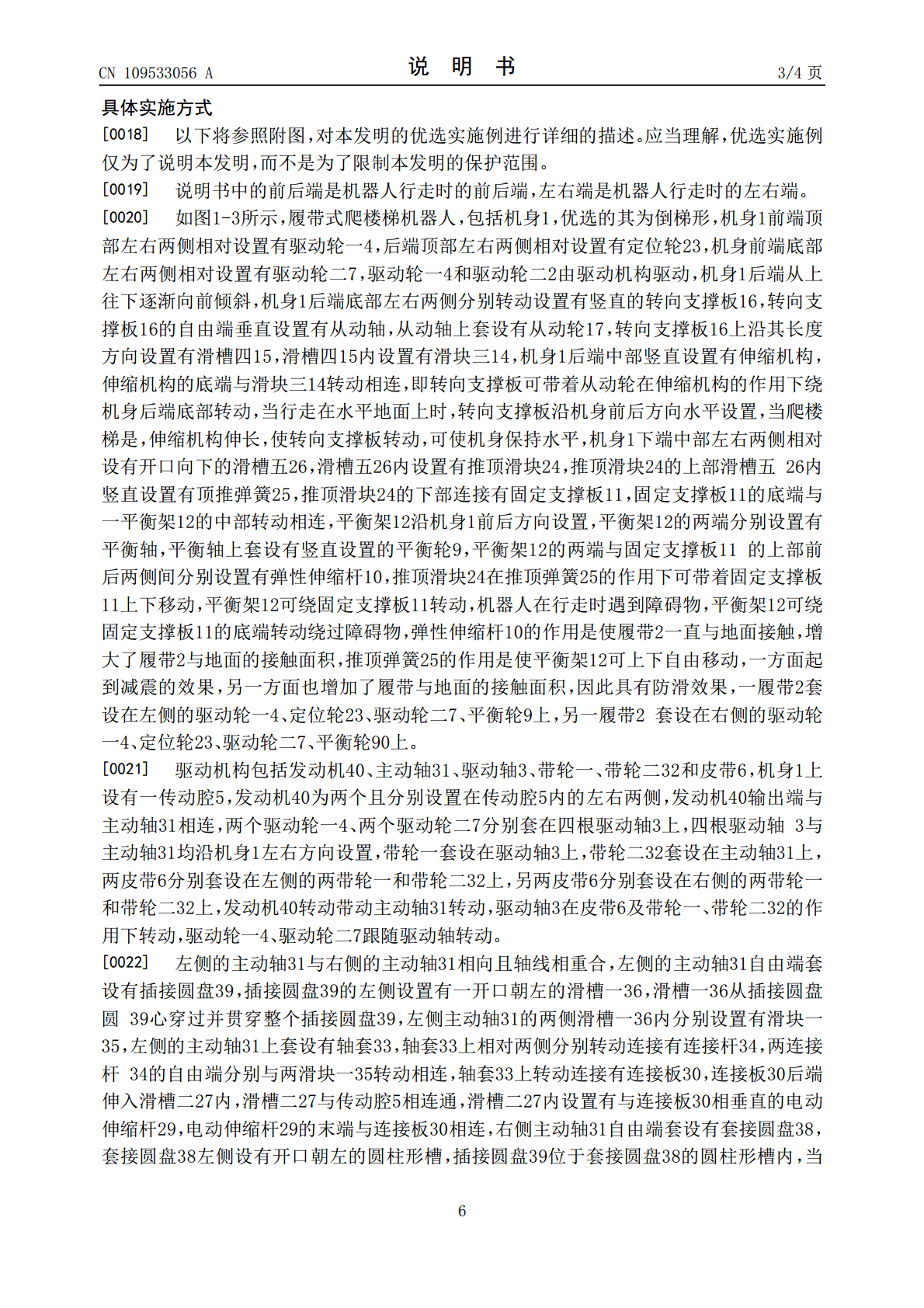
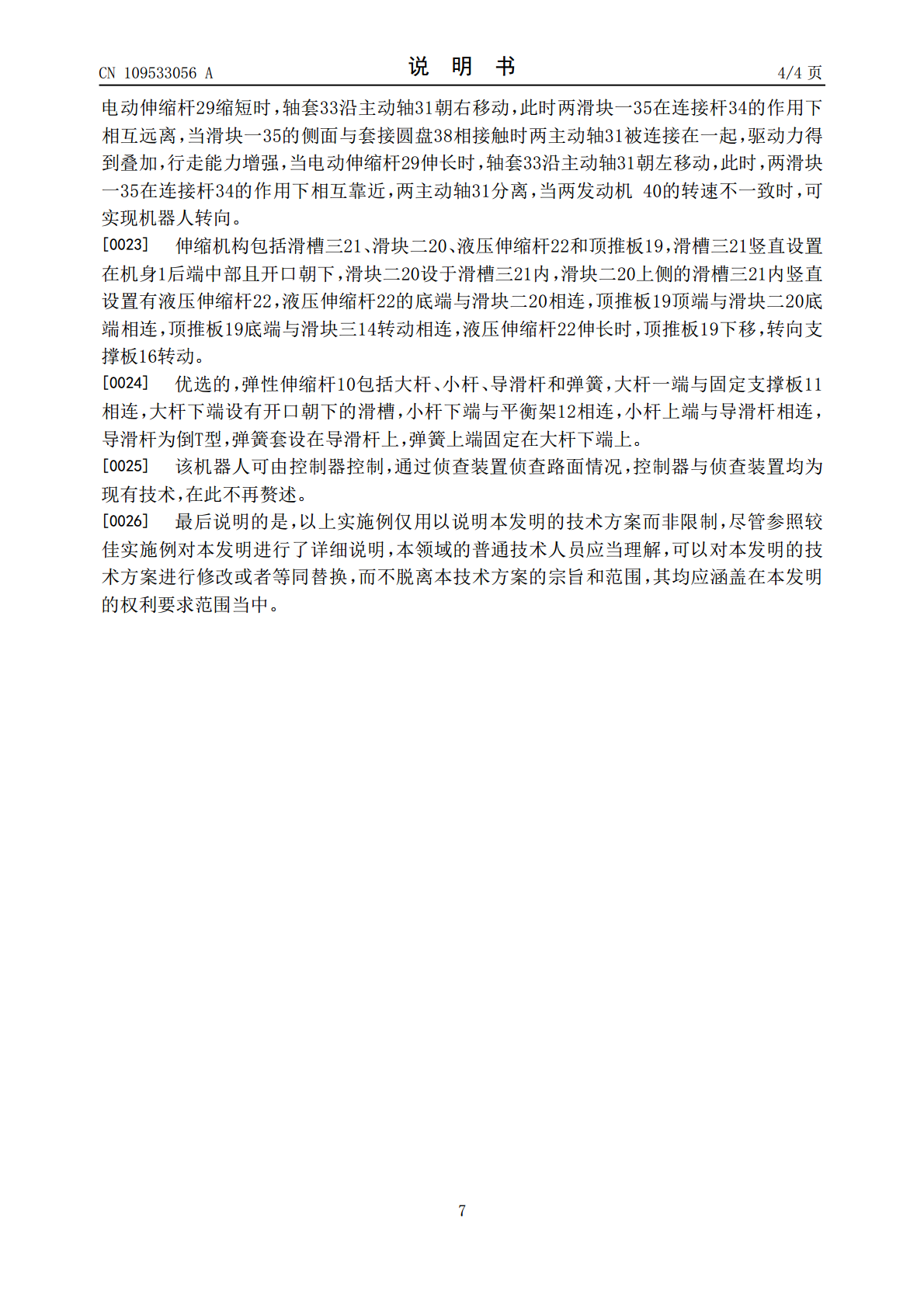
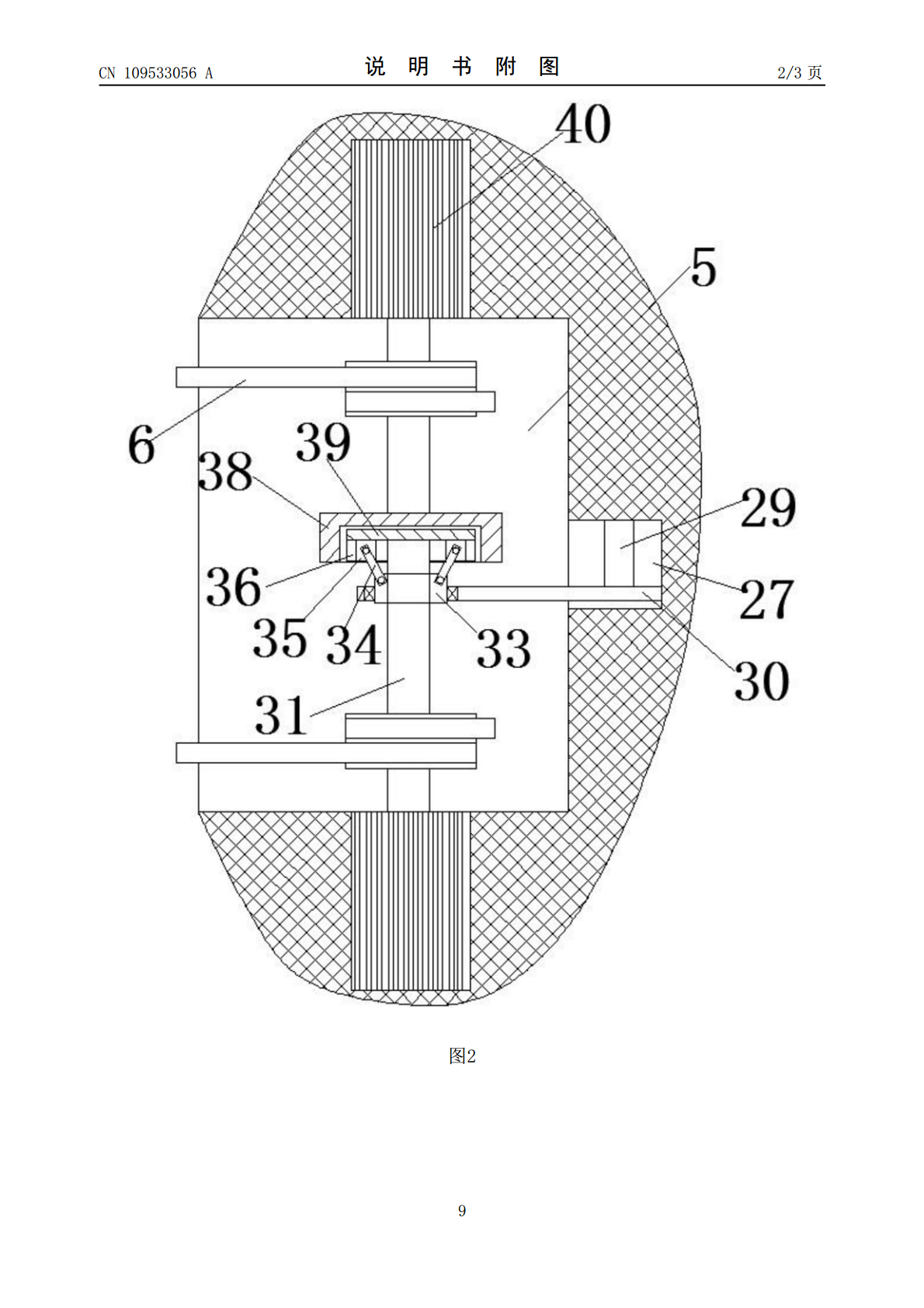
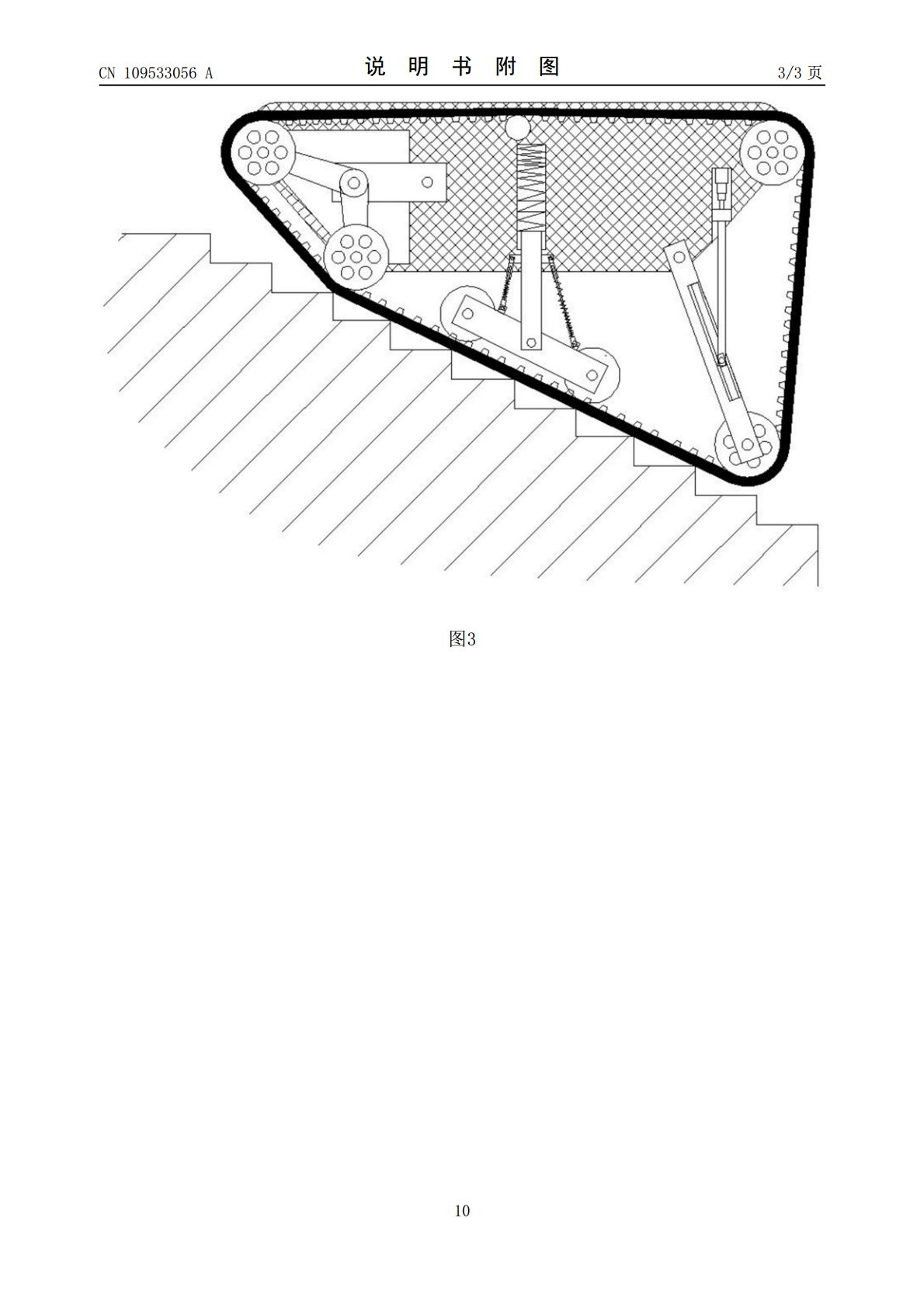
本发明公开了一种履带式爬楼梯机器人,包括机身,其前端顶部左右两侧相对设有驱动轮一,后端顶部左右两侧相对设有定位轮,机身前端底部左右两侧相对设有驱动轮二,驱动轮一和驱动轮二由驱动机构驱动,机身后端从上往下逐渐向前倾斜,机身后端底部左右两侧分别转动设有转向支撑板,转向支撑板的自由端竖直设有从动轮,转向支撑板上沿其长度方向设有其内带滑块三的滑槽四,机身后端中部竖直设有与滑块转动相连的伸缩机构,机身下端中部左右两侧相对设有平衡架,其两端分别竖直设有平衡轮,平衡架与一竖直设的固定支撑板转动相连,固定支撑板顶部与一固
一种履带式爬楼梯车.pdf
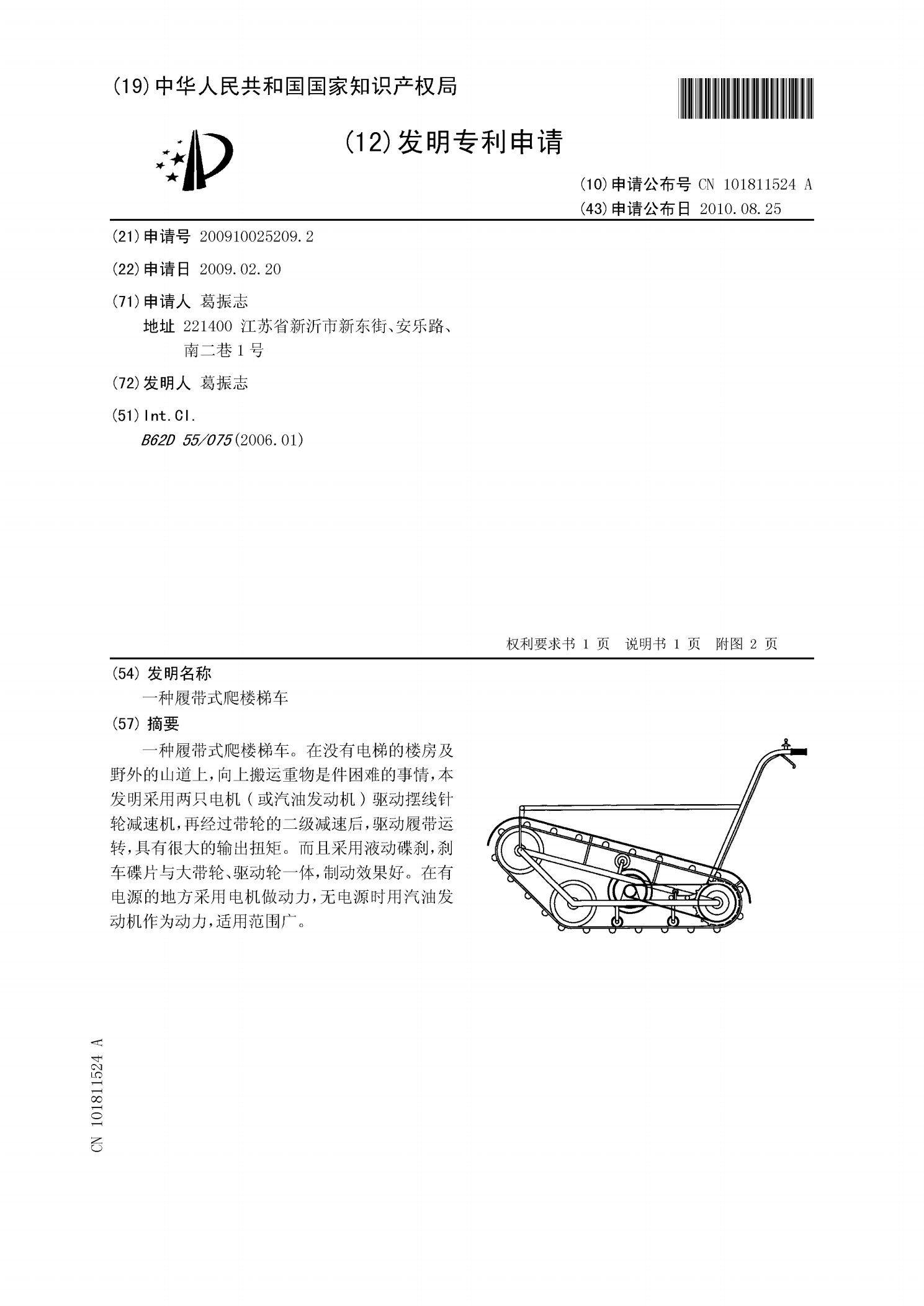
一种履带式爬楼梯车。在没有电梯的楼房及野外的山道上,向上搬运重物是件困难的事情,本发明采用两只电机(或汽油发动机)驱动摆线针轮减速机,再经过带轮的二级减速后,驱动履带运转,具有很大的输出扭矩。而且采用液动碟刹,刹车碟片与大带轮、驱动轮一体,制动效果好。在有电源的地方采用电机做动力,无电源时用汽油发动机作为动力,适用范围广。

带有双杆臂的履带式移动机器人自主攀爬楼梯控制方法.pdf
本发明公开了一种履带式移动机器人爬楼梯的控制方法,所述履带式移动机器人包括前轮、后轮以及包覆在所述前轮和后轮上的履带,其特征在于:在所述前轮设置有转动角度可控的双杆臂,通过调整所述双杆臂的转角逐步提升所述履带式移动机器人的重心位置完成攀爬。本发明提出的一种攀爬台阶的控制方法,适用于相对尺寸较小,无法通过传统的控制方法实现自主攀爬台阶的小型履带式移动机器人。本发明提出的一种新的控制方法能够实现小型履带式移动机器人攀爬楼梯的功能。机器人在攀爬楼梯的过程中,机器人通过自身所携带的传感器实现自主控制,则能有效地避

爬楼梯机器人开题报告.doc
(完整word版)爬楼梯机器人开题报告(完整word版)爬楼梯机器人开题报告(完整word版)爬楼梯机器人开题报告分类号________密级________UDC________编号________江西理工大学开题报告论文题名全方位移动爬楼梯机器人小车的研究申请学位级别___工学硕士____专业名称机械电子工程__学号______研究生姓名_______导师姓名、职称_____2008年12月目录一、课题意义……………………………………………………………………2(一)具有越

爬楼梯机器人开题报告.doc
(完整word版)爬楼梯机器人开题报告(完整word版)爬楼梯机器人开题报告(完整word版)爬楼梯机器人开题报告分类号________密级________UDC________编号________江西理工大学开题报告论文题名全方位移动爬楼梯机器人小车的研究申请学位级别___工学硕士____专业名称机械电子工程__学号______研究生姓名_______导师姓名、职称_____2008年12月目录一、课题意义……………………………………………………………………2(一)具有越