
轮式机器人自动充电方法及装置.pdf

曦晨****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮式机器人自动充电方法及装置.pdf
本发明公开了一种轮式机器人自动充电方法及装置,所述轮式机器人设置有无线定位模块、第一通信模块和车轮,所述轮式机器人可通过自动充电装置进行充电,所述自动充电装置设置有车轮固定模块、第二通信模块和充电部,其特征在于,所述车轮固定模块,宽度与车轮宽度相同,数量与轮式机器人车轮数量相同,中心间距与车轮中心间距相同,所述每个车轮固定模块设置有以车轮固定模块中心线对称的两个车轮固定板,轮式机器人驶入充电目标坐标点,车轮定位模块的车轮固定板升起,实现车轮定位和轮式机器人固定。简单易行,安全可靠。
轮式机器人自动充电装置.pdf
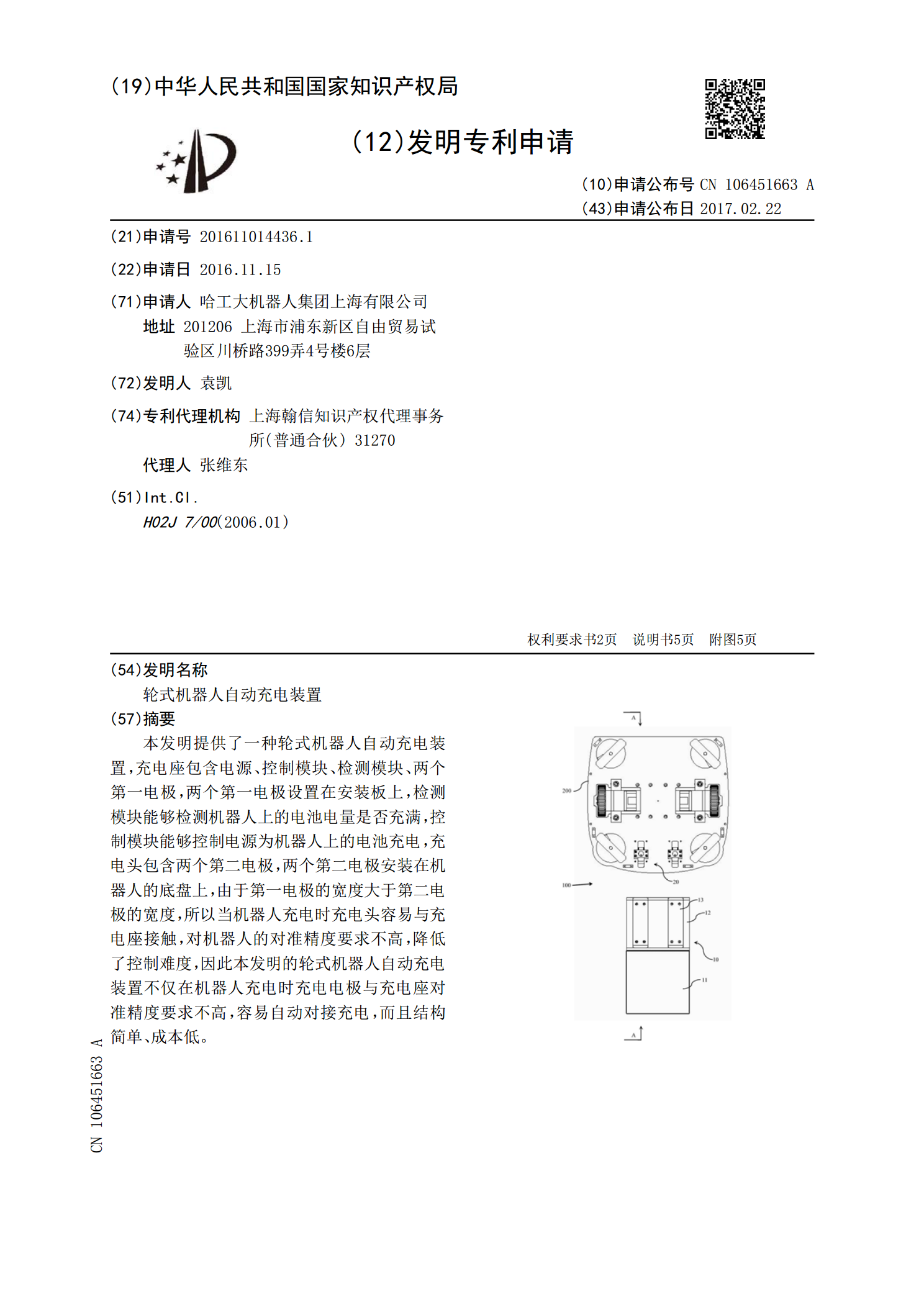
本发明提供了一种轮式机器人自动充电装置,充电座包含电源、控制模块、检测模块、两个第一电极,两个第一电极设置在安装板上,检测模块能够检测机器人上的电池电量是否充满,控制模块能够控制电源为机器人上的电池充电,充电头包含两个第二电极,两个第二电极安装在机器人的底盘上,由于第一电极的宽度大于第二电极的宽度,所以当机器人充电时充电头容易与充电座接触,对机器人的对准精度要求不高,降低了控制难度,因此本发明的轮式机器人自动充电装置不仅在机器人充电时充电电极与充电座对准精度要求不高,容易自动对接充电,而且结构简单、成本低
一种防爆轮式巡检机器人防爆自动充电装置.pdf
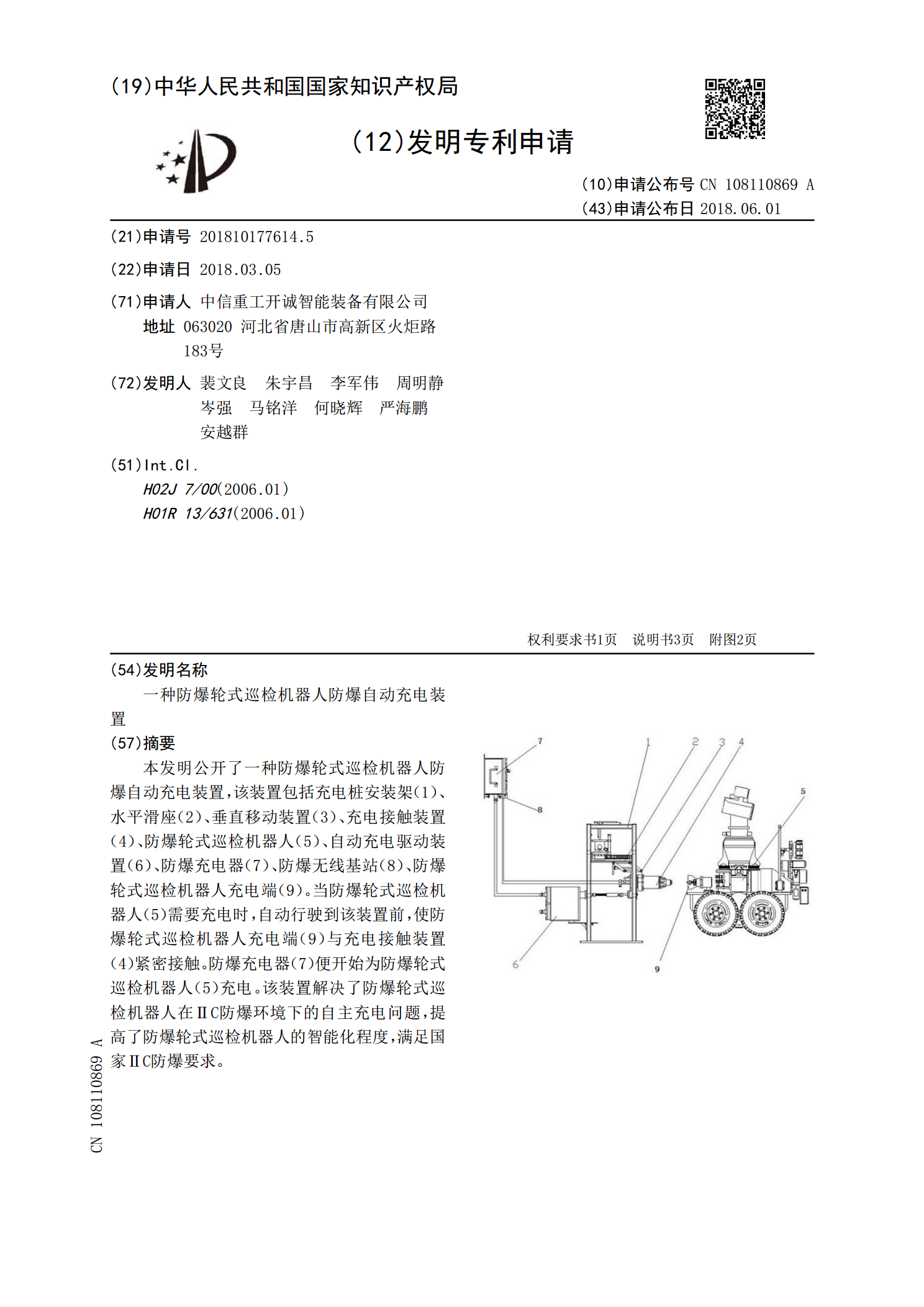
本发明公开了一种防爆轮式巡检机器人防爆自动充电装置,该装置包括充电桩安装架(1)、水平滑座(2)、垂直移动装置(3)、充电接触装置(4)、防爆轮式巡检机器人(5)、自动充电驱动装置(6)、防爆充电器(7)、防爆无线基站(8)、防爆轮式巡检机器人充电端(9)。当防爆轮式巡检机器人(5)需要充电时,自动行驶到该装置前,使防爆轮式巡检机器人充电端(9)与充电接触装置(4)紧密接触。防爆充电器(7)便开始为防爆轮式巡检机器人(5)充电。该装置解决了防爆轮式巡检机器人在ⅡC防爆环境下的自主充电问题,提高了防爆轮式巡

一种用于轮式机器人自主充电的电源自动对接装置.pdf
本发明属于电器控制领域,提供一种用于轮式机器人自主充电的电源自动对接装置,包括悬挂的馈电装置和车载的受电装置,所述馈电装置包括电动机、丝杠、滑块、滑轨、左限位开关、右限位开关、电线悬挂杆、悬挂环、电源线、特制电源插座、悬挂弹簧、悬挂钢丝和无线控制器,所述受电装置包括电动机、丝杠、滑块、滑轨、支撑座、梳状机械手、电极插槽、前限位开关、后限位开关、对接控制器。本发明自动对接装置自主操作过程模拟人的电源对接行为,适应性强,准确且可靠性高,只要轮式机器人停泊在指定区域,尽管可能存在前后、左右以及高度偏差,均能实现

一种基于无线和红外定位的轮式机器人自动充电的方法.pdf
本发明公开了一种基于无线和红外定位的轮式机器人自动充电的方法,在墙上设有信标,在靠近信标的地面上设有充电桩,机器人身上不同位置设有ZigBee,左右两侧各设有红外传感器,机器人通过无线ZigBee判断信标方位,再通过红外传感器控制机器人平行于墙壁行走,直至机器人底部电源电极与充电桩上的弹片接触上,实现充电。本发明定位精准、复用性高、耗能低、控制简单、成本低。