
一种控制力矩陀螺.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种控制力矩陀螺的隔振装置及控制力矩陀螺.pdf
本发明涉及一种控制力矩陀螺的隔振装置及控制力矩陀螺,控制力矩陀螺的隔振装置包括两组相同的隔振组件,所述隔振组件包括顶板、底板和隔振器,所述底板与所述顶板之间安装有两个隔振器;两组隔振组件并排间隔布置,所述隔振组件上的隔振器分别朝向另一个隔振组件倾斜且相互靠拢,两组隔振组件的四个隔振器的中心轴分别位于同一个四棱锥的四条棱边上。本发明的隔振装置,通过设置两个隔振组件,且两个隔振组件上的隔振器排布成类似金字塔的四棱锥形状,使四个隔振器的受力均匀平衡,既能降低控制力矩陀螺微振动对载荷(如空间相机)的影响,也能抑制
一种控制力矩陀螺.pdf
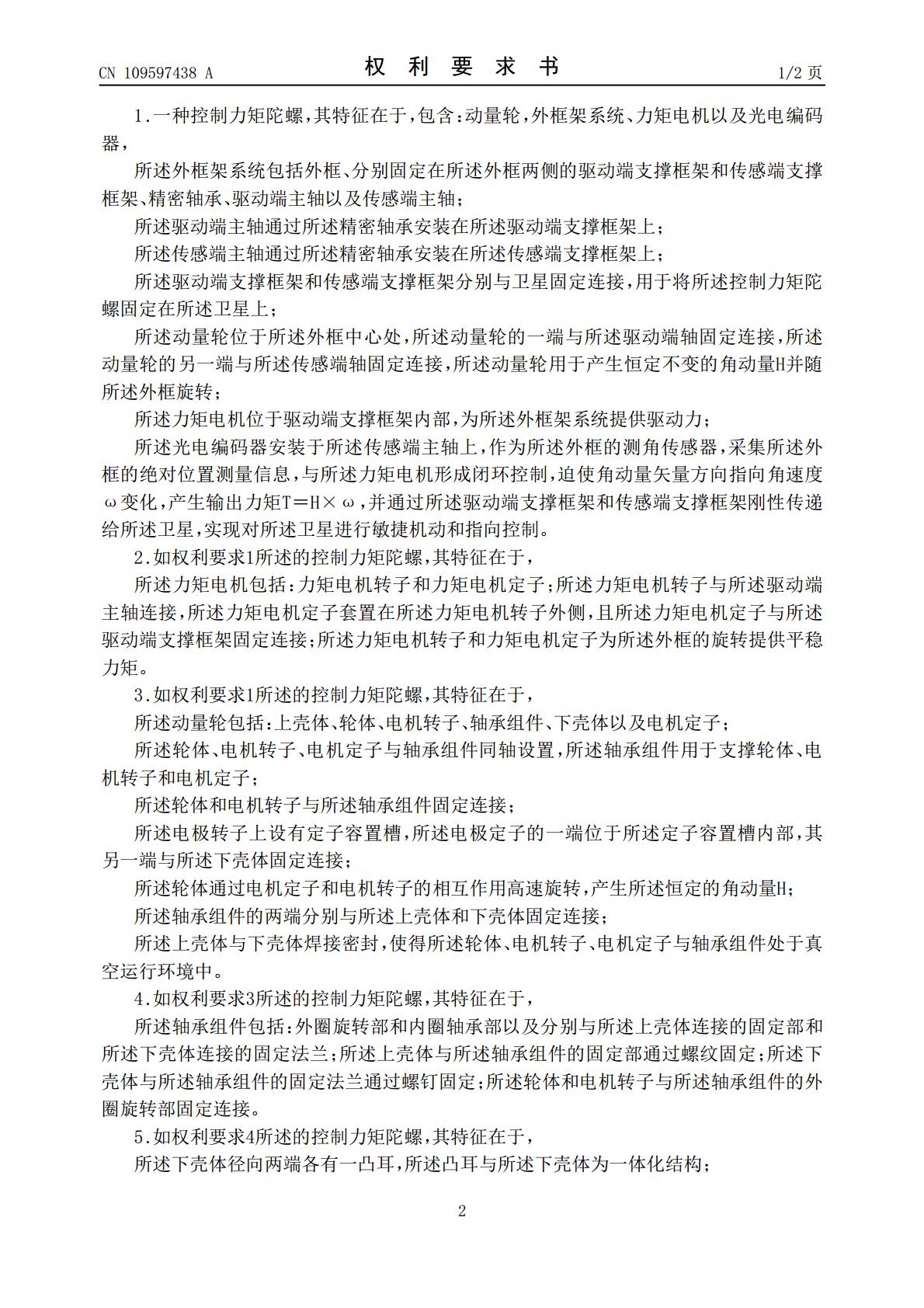
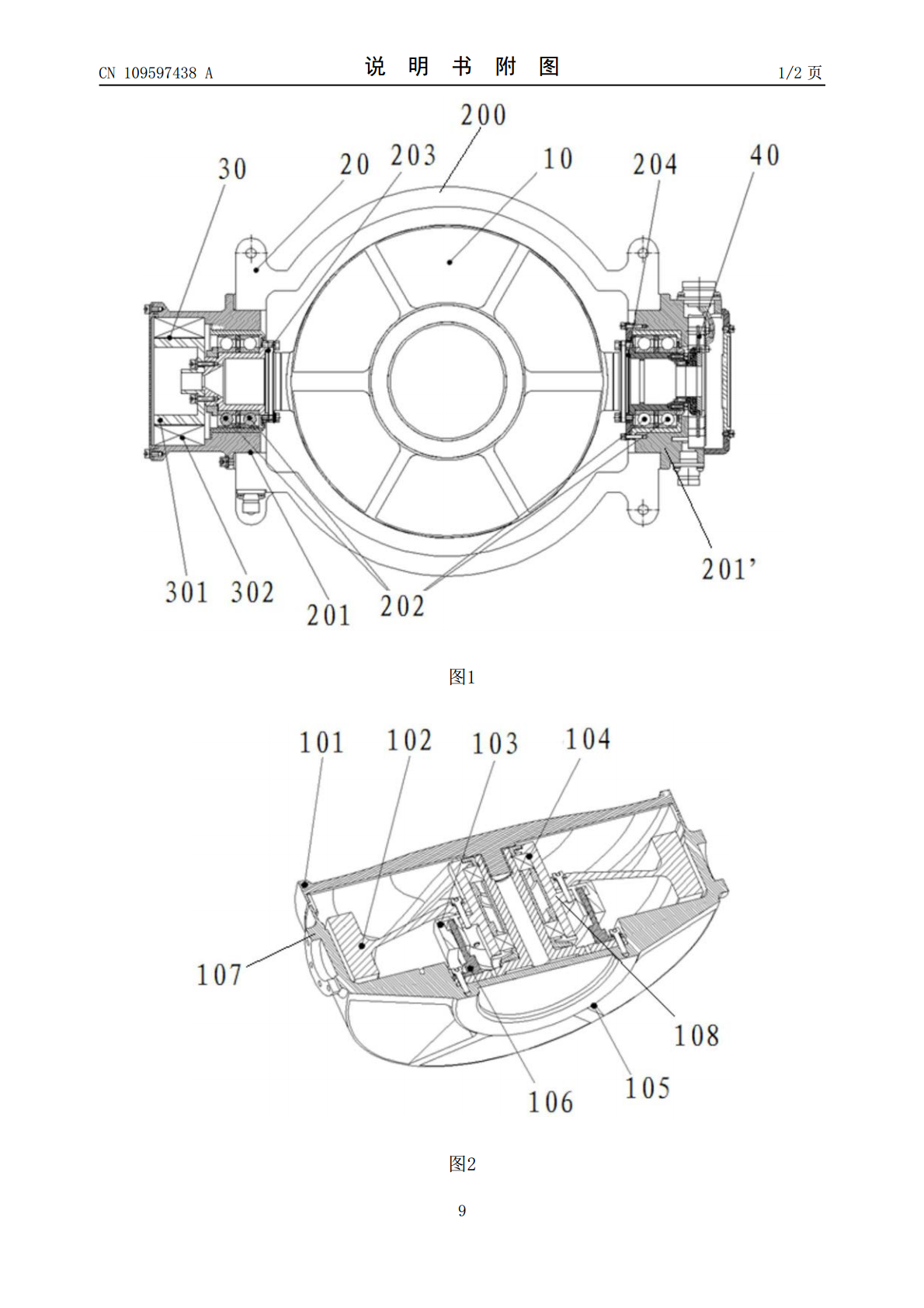
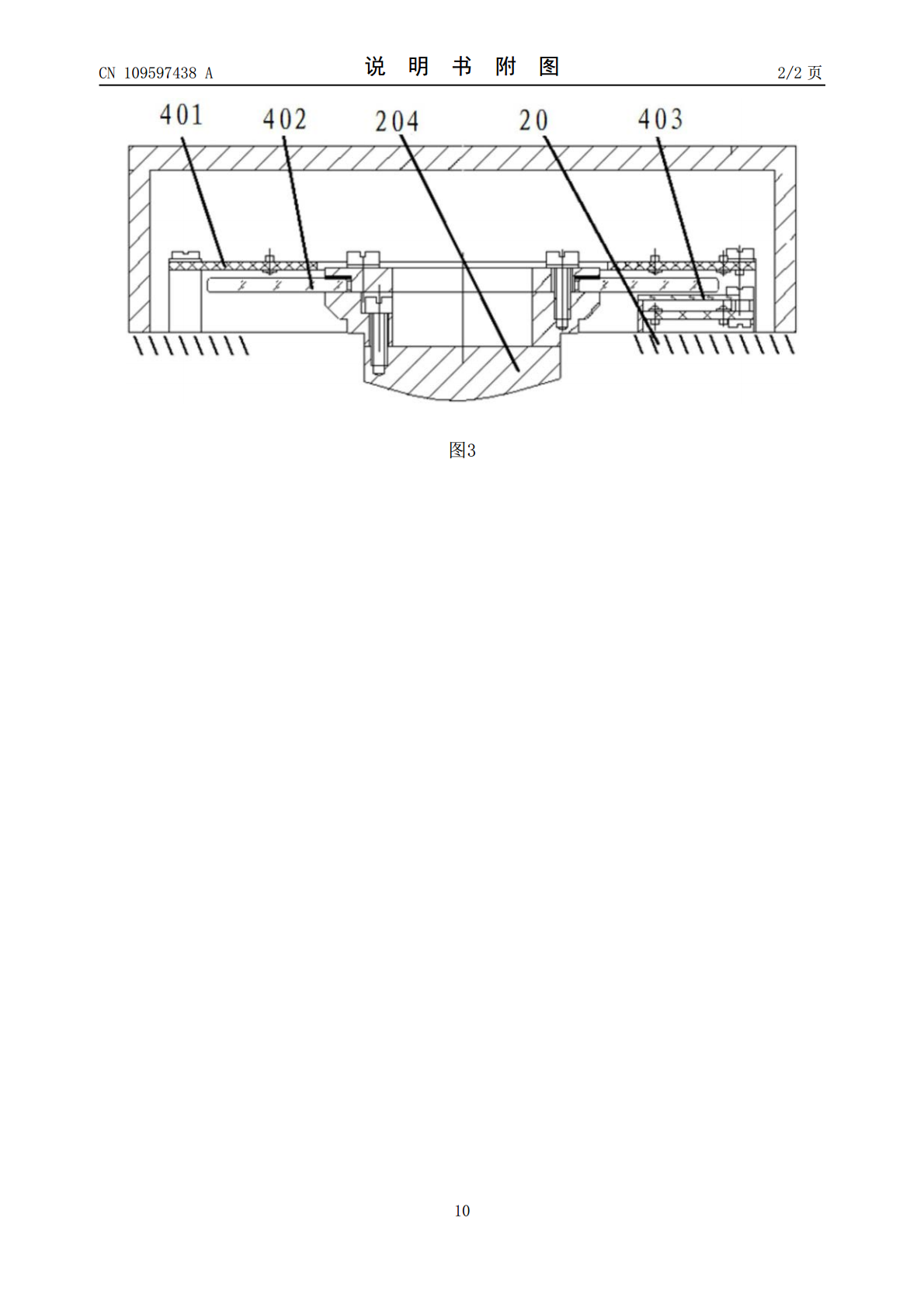
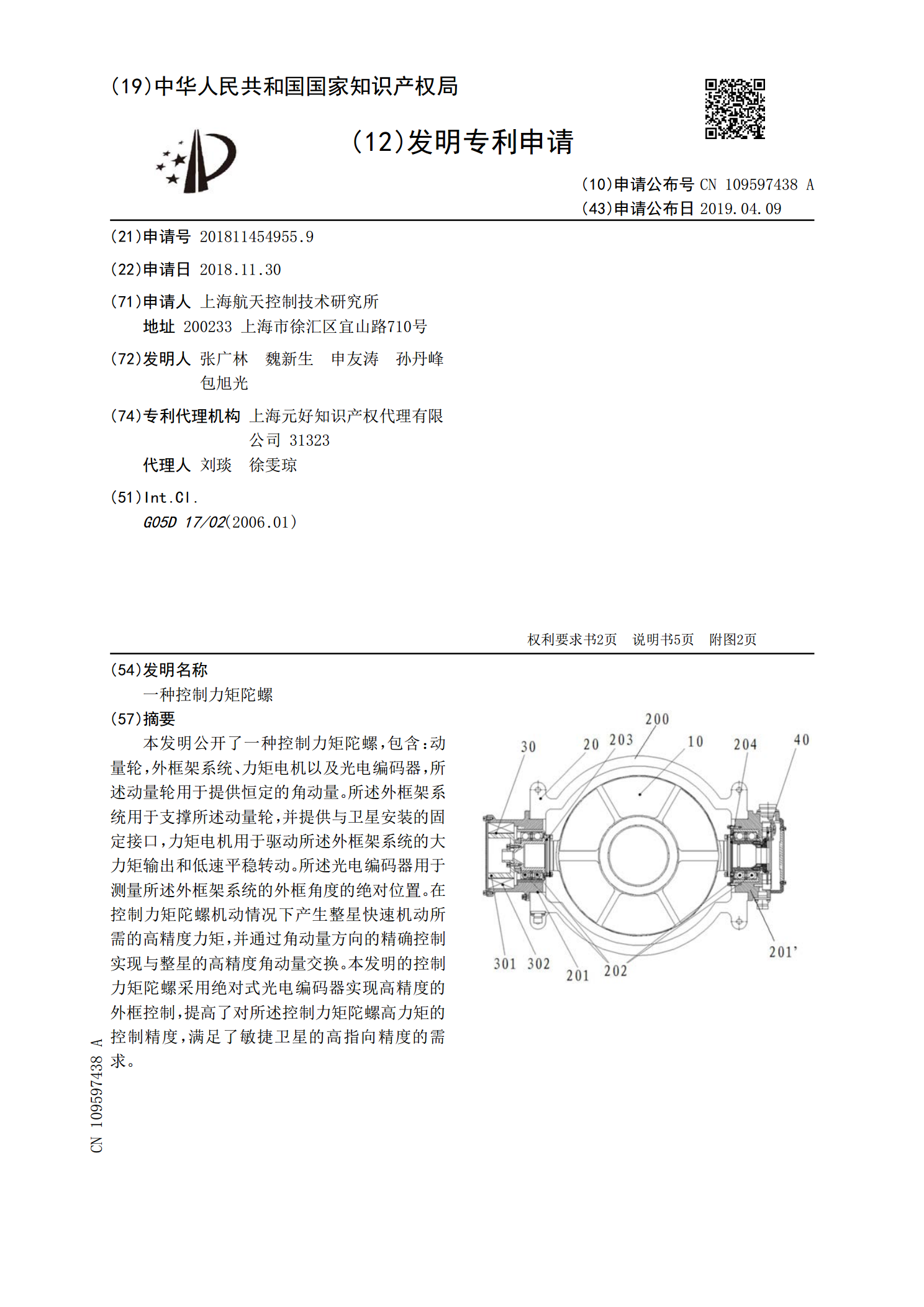
本发明公开了一种控制力矩陀螺,包含:动量轮,外框架系统、力矩电机以及光电编码器,所述动量轮用于提供恒定的角动量。所述外框架系统用于支撑所述动量轮,并提供与卫星安装的固定接口,力矩电机用于驱动所述外框架系统的大力矩输出和低速平稳转动。所述光电编码器用于测量所述外框架系统的外框角度的绝对位置。在控制力矩陀螺机动情况下产生整星快速机动所需的高精度力矩,并通过角动量方向的精确控制实现与整星的高精度角动量交换。本发明的控制力矩陀螺采用绝对式光电编码器实现高精度的外框控制,提高了对所述控制力矩陀螺高力矩的控制精度,满
一种控制力矩陀螺.pdf
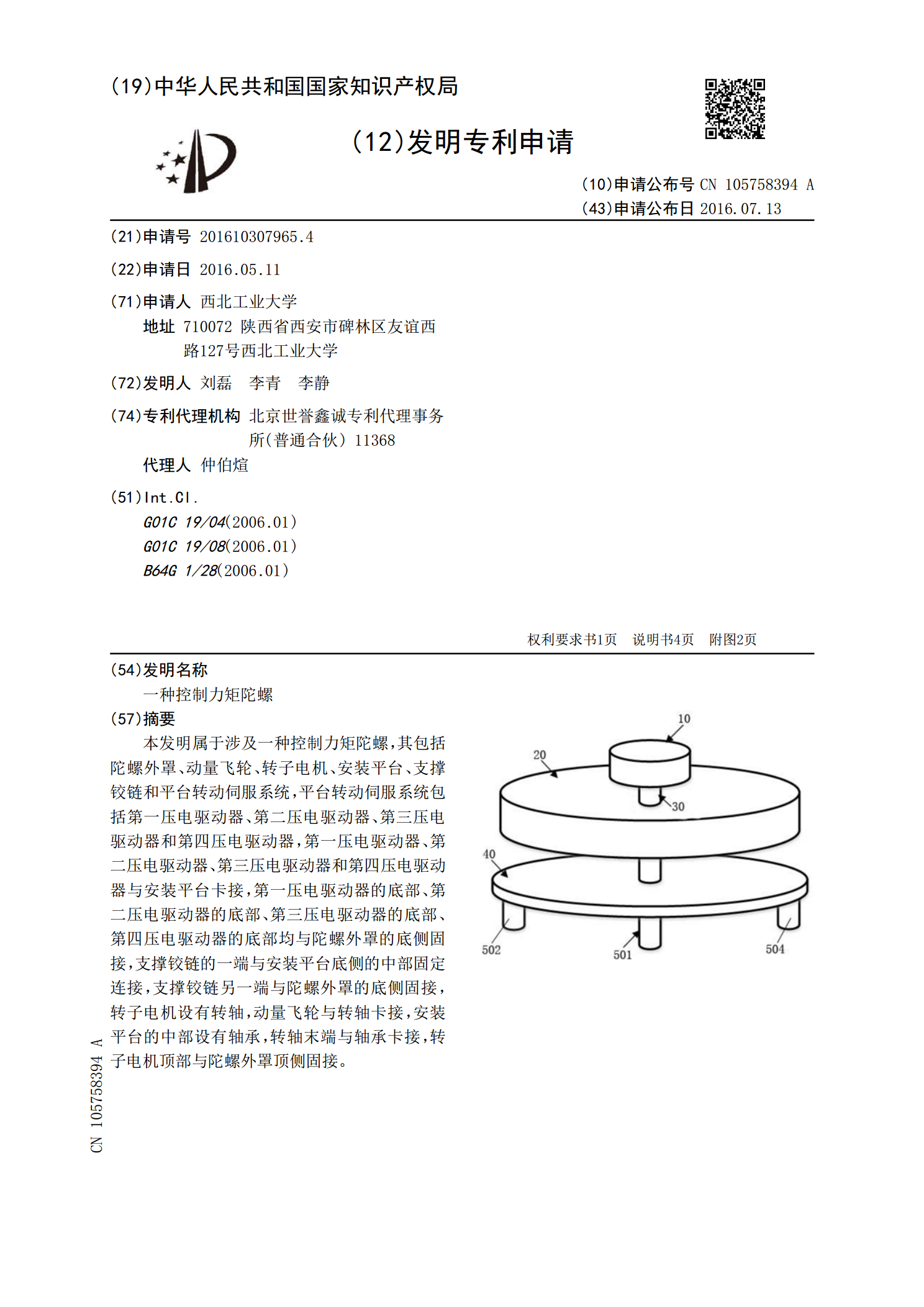
本发明属于涉及一种控制力矩陀螺,其包括陀螺外罩、动量飞轮、转子电机、安装平台、支撑铰链和平台转动伺服系统,平台转动伺服系统包括第一压电驱动器、第二压电驱动器、第三压电驱动器和第四压电驱动器,第一压电驱动器、第二压电驱动器、第三压电驱动器和第四压电驱动器与安装平台卡接,第一压电驱动器的底部、第二压电驱动器的底部、第三压电驱动器的底部、第四压电驱动器的底部均与陀螺外罩的底侧固接,支撑铰链的一端与安装平台底侧的中部固定连接,支撑铰链另一端与陀螺外罩的底侧固接,转子电机设有转轴,动量飞轮与转轴卡接,安装平台的中部
一种控制力矩陀螺模块.pdf
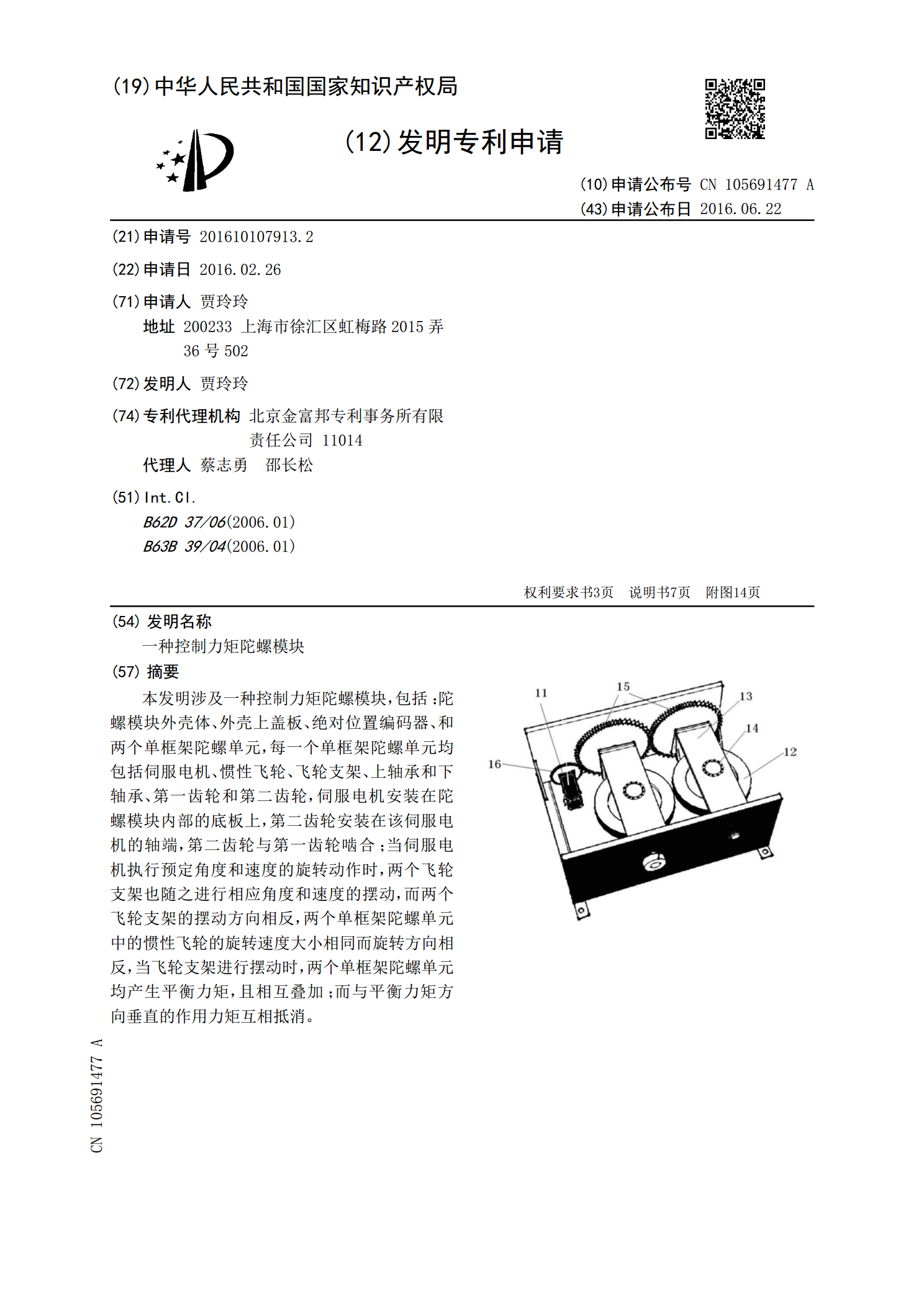
本发明涉及一种控制力矩陀螺模块,包括:陀螺模块外壳体、外壳上盖板、绝对位置编码器、和两个单框架陀螺单元,每一个单框架陀螺单元均包括伺服电机、惯性飞轮、飞轮支架、上轴承和下轴承、第一齿轮和第二齿轮,伺服电机安装在陀螺模块内部的底板上,第二齿轮安装在该伺服电机的轴端,第二齿轮与第一齿轮啮合;当伺服电机执行预定角度和速度的旋转动作时,两个飞轮支架也随之进行相应角度和速度的摆动,而两个飞轮支架的摆动方向相反,两个单框架陀螺单元中的惯性飞轮的旋转速度大小相同而旋转方向相反,当飞轮支架进行摆动时,两个单框架陀螺单元均
一种复合轴控制力矩陀螺.pdf
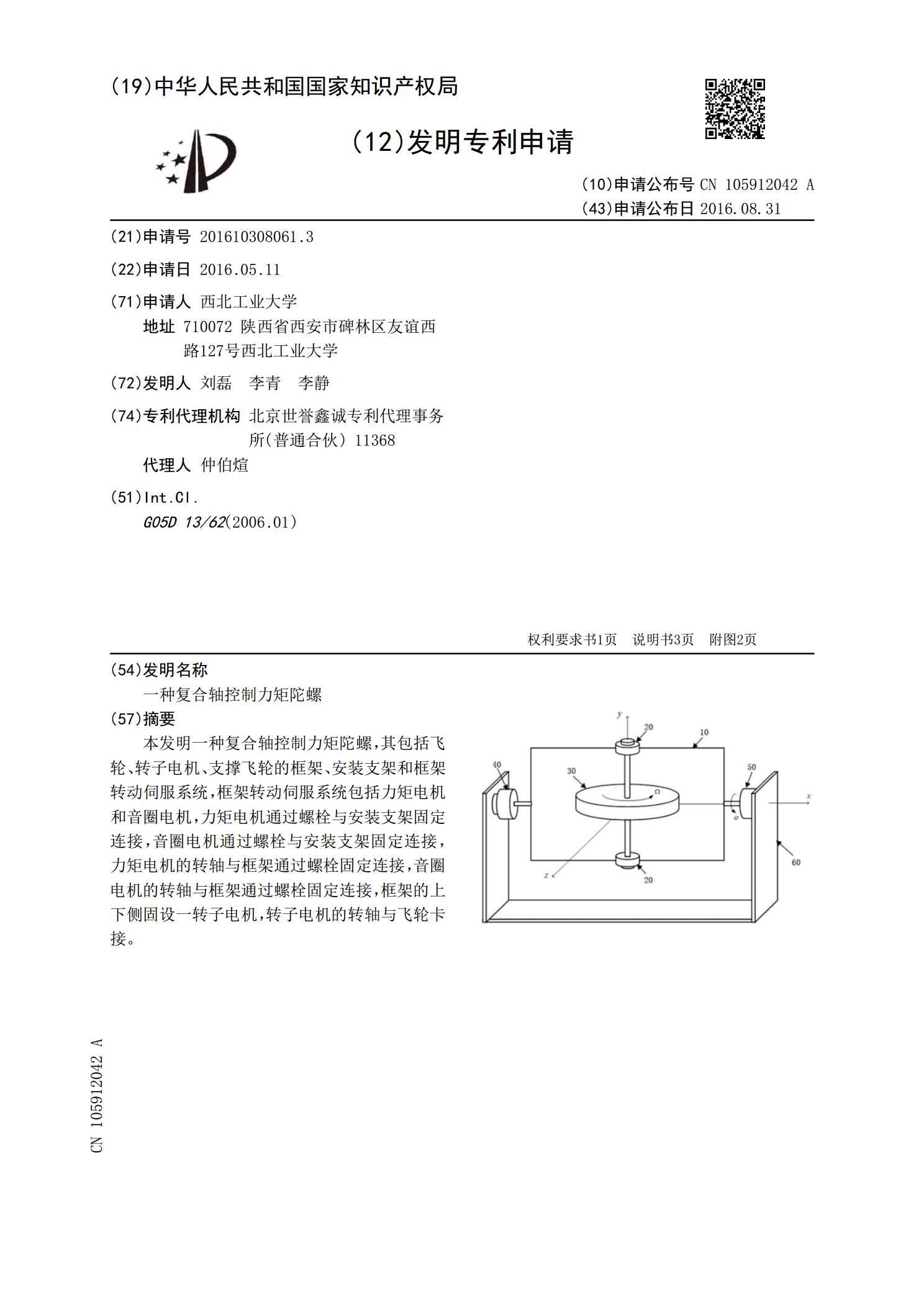
本发明一种复合轴控制力矩陀螺,其包括飞轮、转子电机、支撑飞轮的框架、安装支架和框架转动伺服系统,框架转动伺服系统包括力矩电机和音圈电机,力矩电机通过螺栓与安装支架固定连接,音圈电机通过螺栓与安装支架固定连接,力矩电机的转轴与框架通过螺栓固定连接,音圈电机的转轴与框架通过螺栓固定连接,框架的上下侧固设一转子电机,转子电机的转轴与飞轮卡接。