
一种无人直升机的着舰控制方法.pdf

宏硕****mo


1/8

2/8
3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人直升机的着舰控制方法.pdf
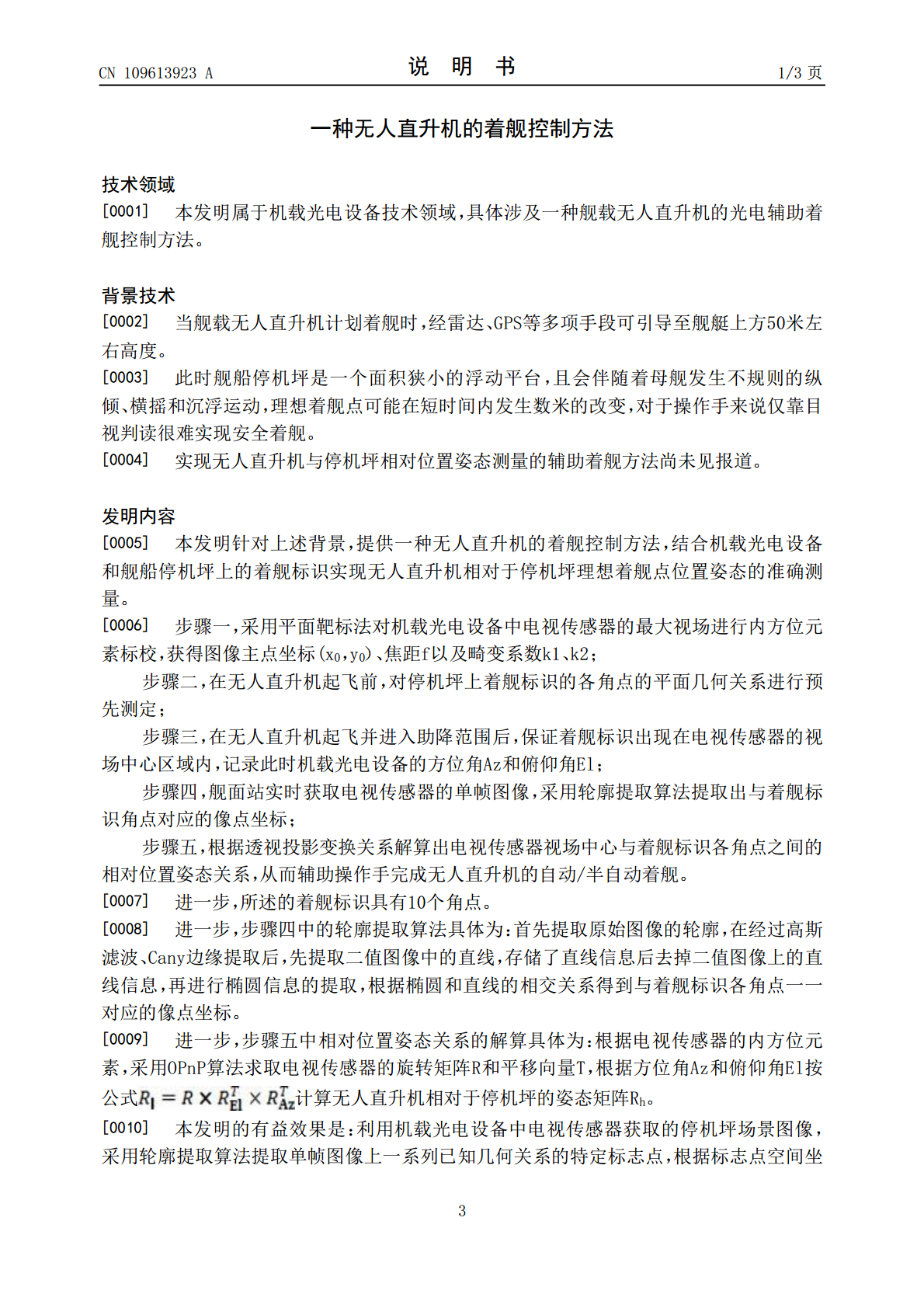
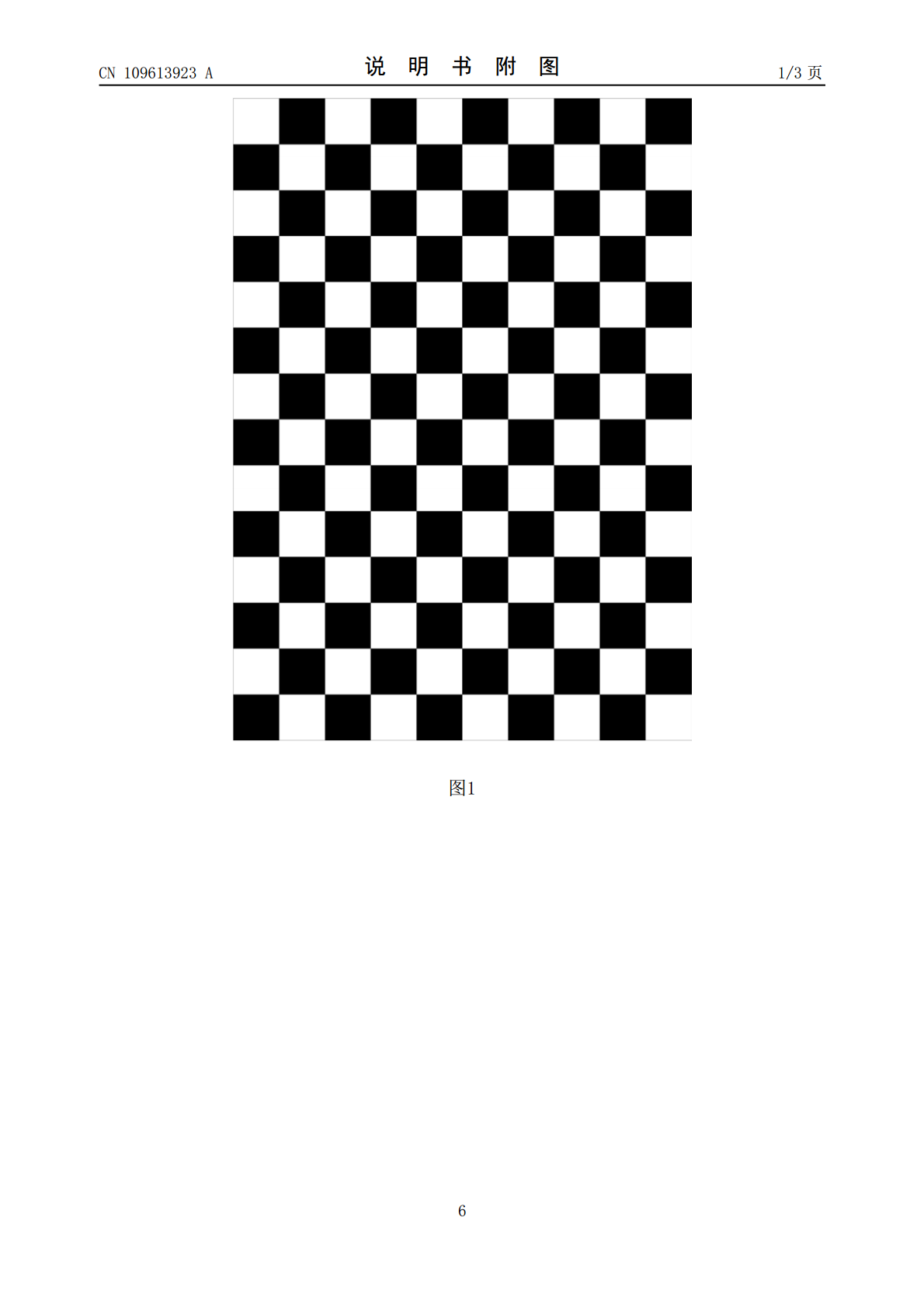
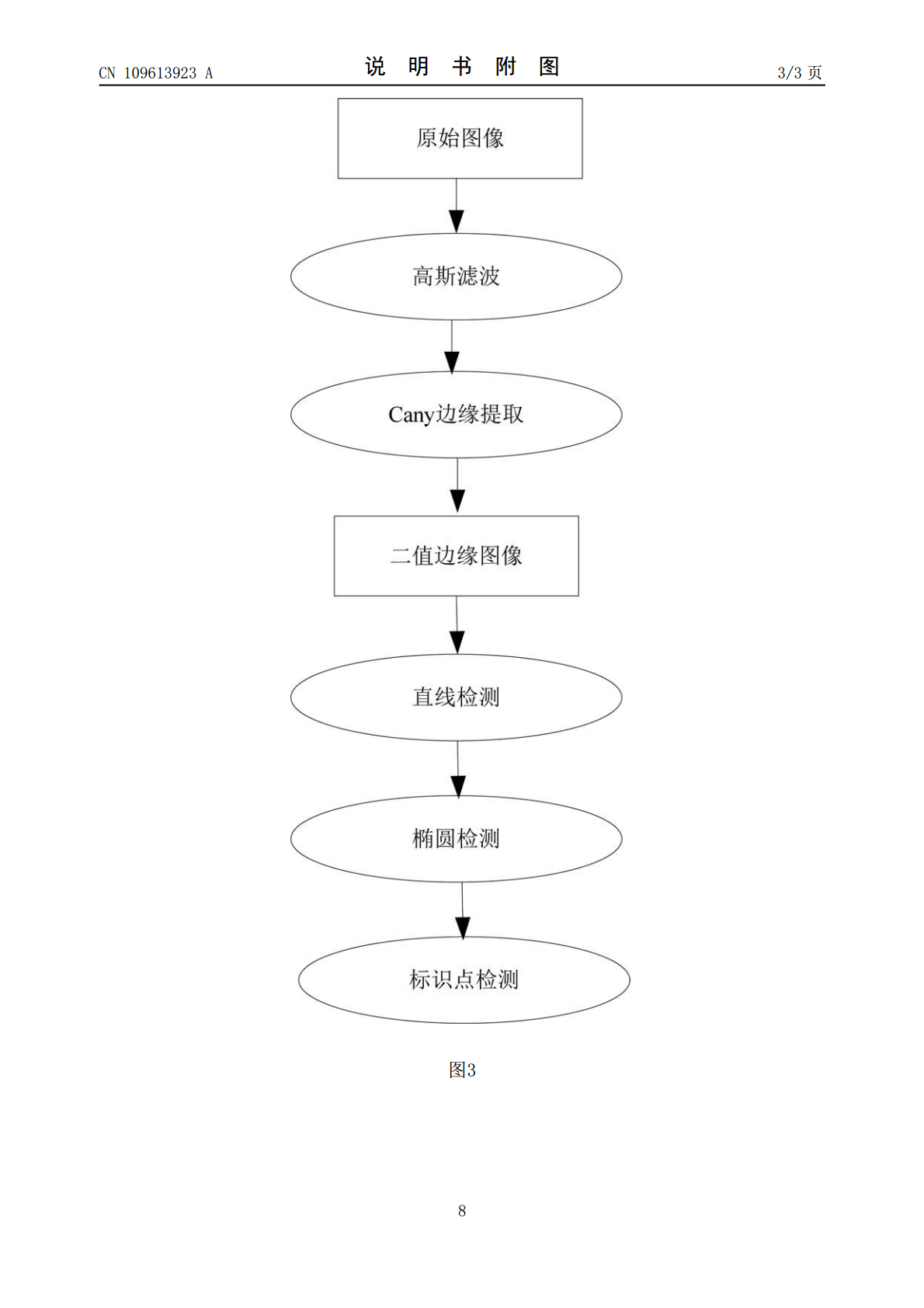
本发明公开了一种无人直升机的着舰控制方法,采用平面靶标法对机载光电设备中电视传感器的最大视场进行内方位元素标定,采用轮廓提取算法提取电视传感器图像上已知几何关系的标识点,采用正交迭代优化的OPnP位置姿态估计方法解算无人直升机相对于停机坪各角点的相对位置姿态,实现了对无人机与舰船停机坪相对位置姿态的快速测量,特别适用于舰载无人直升机光电辅助着舰,具有极高的推广使用价值。

一种基于红外视觉的无人直升机着舰引导控制方法.pdf
本发明公开了一种基于红外视觉的无人直升机着舰引导控制方法,采用红外识别标志作为舰艇甲板上的识别标志,无人直升机采用设置了红外滤光片的摄像机对合作目标进行拍摄。处理时,首先对拍摄的图像进行滤波,并采用阀值化的方法进行二值化处理;然后,进行轮廓提取,得到红外合作目标的轮廓;接着根据红外合作目标的轮廓计算其中心坐标,并计算出无人直升机相对于合作目标的位置误差以及甲板的姿态;最后,无人直升机的位置控制器根据位置误差调整无人直升机的位置,无人直升机根据甲板的姿态调整无人直升机的姿态。本发明控制简单,实时性好,精度高
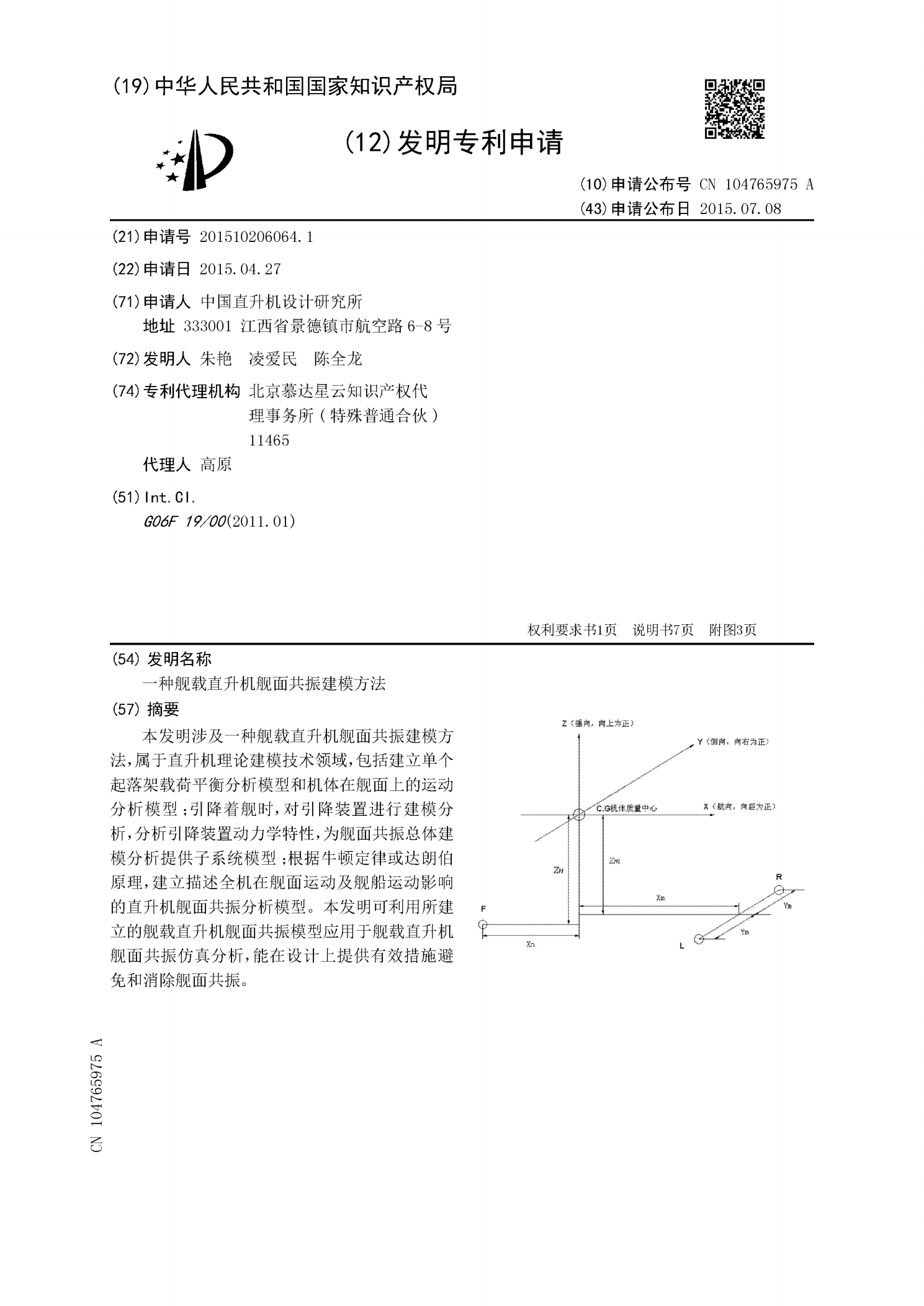
一种舰载直升机舰面共振建模方法.pdf
本发明涉及一种舰载直升机舰面共振建模方法,属于直升机理论建模技术领域,包括建立单个起落架载荷平衡分析模型和机体在舰面上的运动分析模型;引降着舰时,对引降装置进行建模分析,分析引降装置动力学特性,为舰面共振总体建模分析提供子系统模型;根据牛顿定律或达朗伯原理,建立描述全机在舰面运动及舰船运动影响的直升机舰面共振分析模型。本发明可利用所建立的舰载直升机舰面共振模型应用于舰载直升机舰面共振仿真分析,能在设计上提供有效措施避免和消除舰面共振。
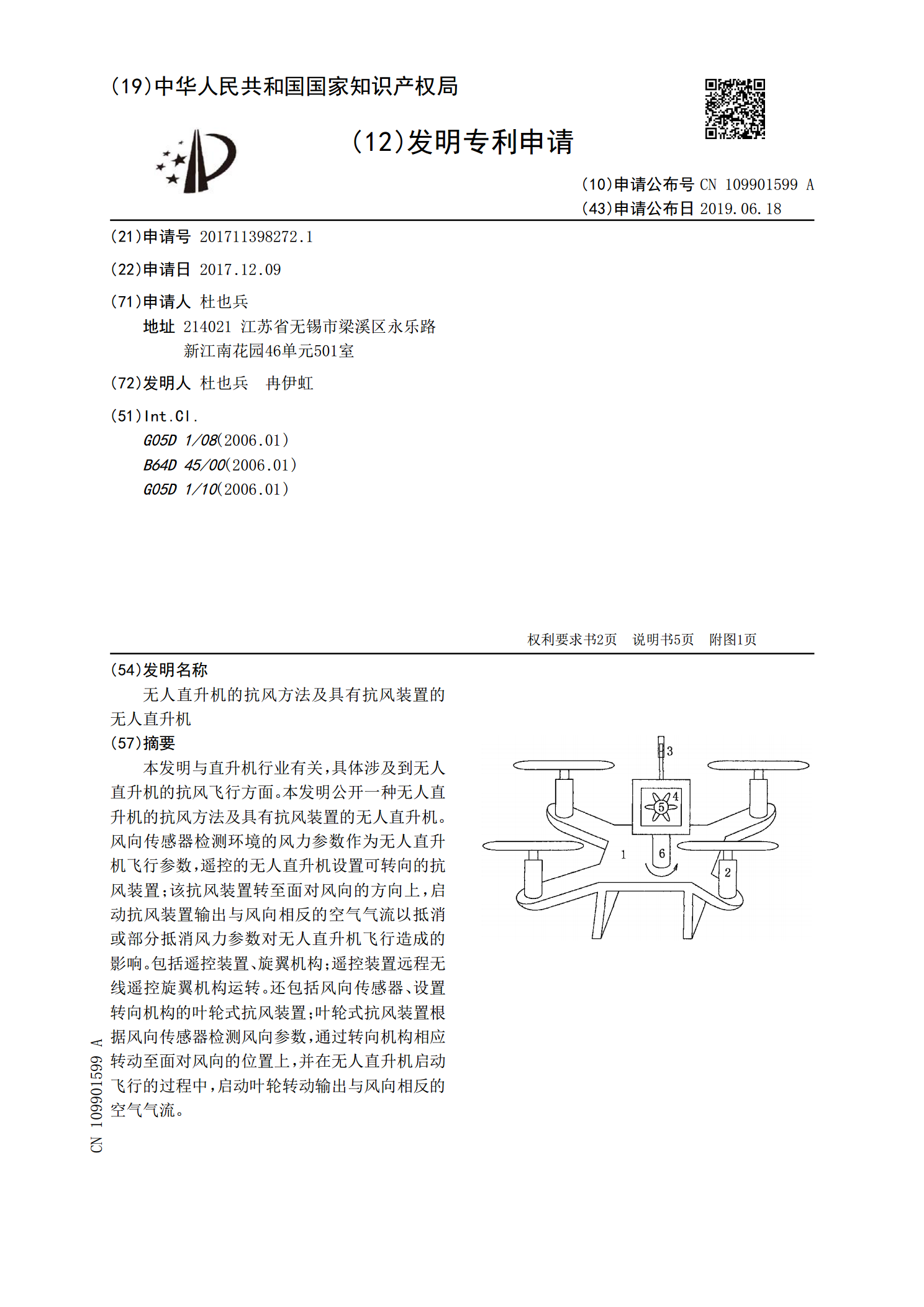
无人直升机的抗风方法及具有抗风装置的无人直升机.pdf
本发明与直升机行业有关,具体涉及到无人直升机的抗风飞行方面。本发明公开一种无人直升机的抗风方法及具有抗风装置的无人直升机。风向传感器检测环境的风力参数作为无人直升机飞行参数,遥控的无人直升机设置可转向的抗风装置;该抗风装置转至面对风向的方向上,启动抗风装置输出与风向相反的空气气流以抵消或部分抵消风力参数对无人直升机飞行造成的影响。包括遥控装置、旋翼机构;遥控装置远程无线遥控旋翼机构运转。还包括风向传感器、设置转向机构的叶轮式抗风装置;叶轮式抗风装置根据风向传感器检测风向参数,通过转向机构相应转动至面对风向

无人直升机自主飞行控制.pdf
科技论坛:页无人直升机自主飞行控制仿真研究ResearchonSimulationofAutonomousFlightControlSystemforanUnmannedHelicopter