
基于球齿轮传动的柔性机械臂.pdf

努力****向丝

1/9
2/9
3/9

4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于球齿轮传动的柔性机械臂.pdf
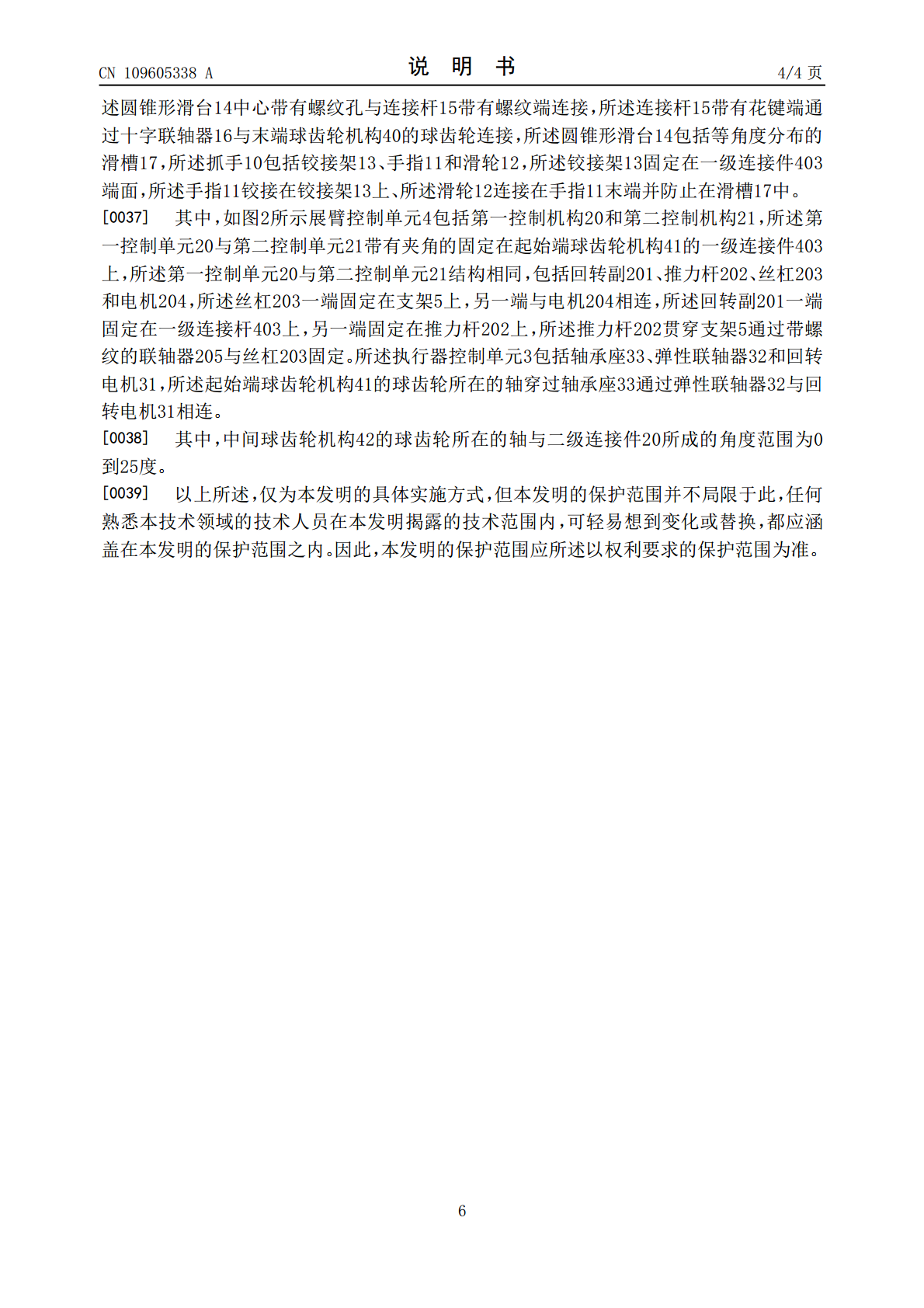
本发明公开了基于球齿轮传动的柔性机械臂,包括末端执行器、展臂单元、执行器控制单元、展臂控制单元和支架,所述末端执行器轴连接在展臂单元一端,展臂单元另一端与执行器控制单元相连,所述展臂控制单元固定在展臂单元另一端的两侧,所述支架用于固定和支撑执行器控制单元和展臂控制单元;采用球齿轮传动,增加了机械臂的柔性,便于勘探,增加灵活度,减少关节复杂程度。
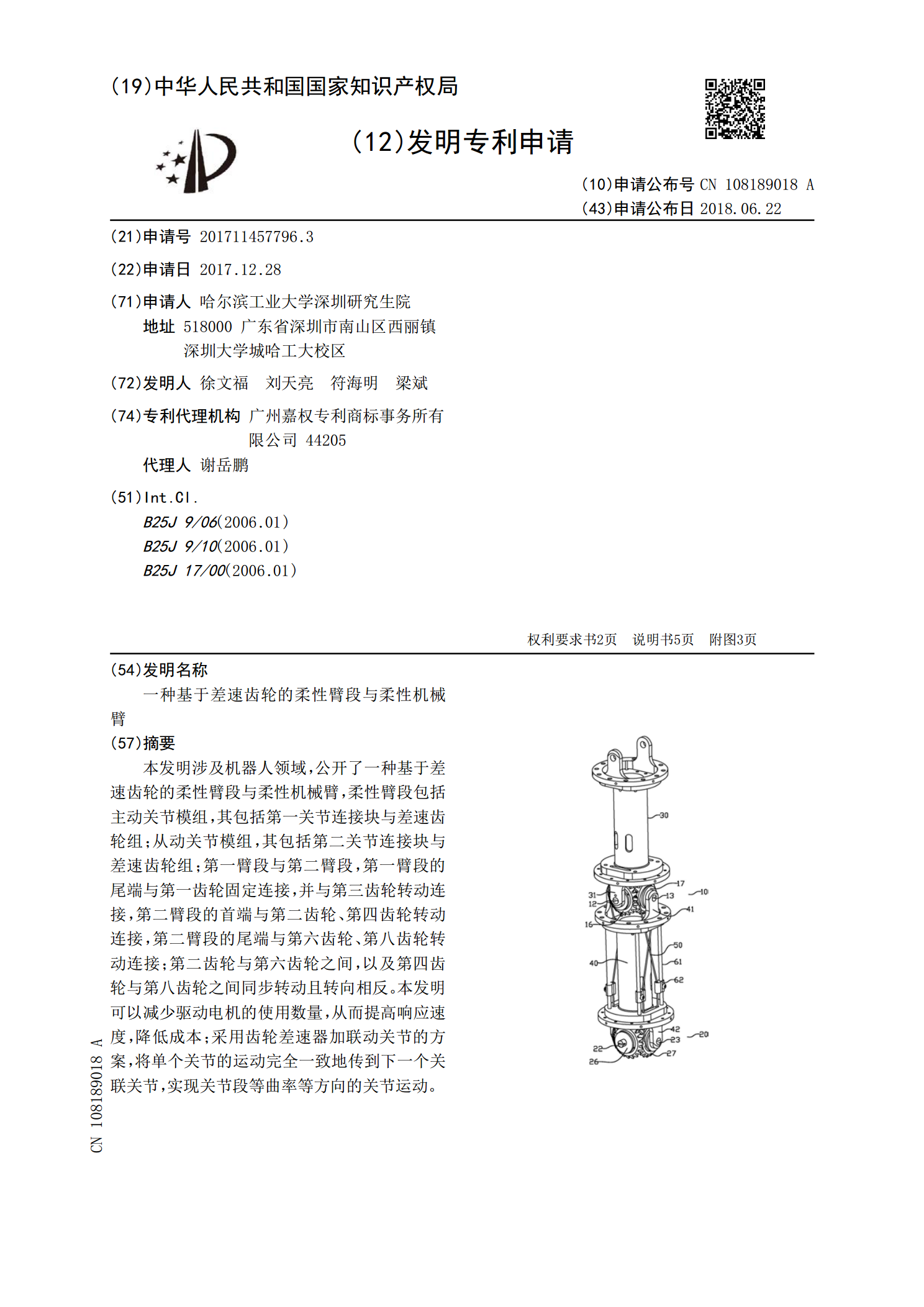
一种基于差速齿轮的柔性臂段与柔性机械臂.pdf
本发明涉及机器人领域,公开了一种基于差速齿轮的柔性臂段与柔性机械臂,柔性臂段包括主动关节模组,其包括第一关节连接块与差速齿轮组;从动关节模组,其包括第二关节连接块与差速齿轮组;第一臂段与第二臂段,第一臂段的尾端与第一齿轮固定连接,并与第三齿轮转动连接,第二臂段的首端与第二齿轮、第四齿轮转动连接,第二臂段的尾端与第六齿轮、第八齿轮转动连接;第二齿轮与第六齿轮之间,以及第四齿轮与第八齿轮之间同步转动且转向相反。本发明可以减少驱动电机的使用数量,从而提高响应速度,降低成本;采用齿轮差速器加联动关节的方案,将单个

基于齿轮传动的等曲率弯曲机械臂.pdf
本发明涉及一种基于齿轮传动的等曲率弯曲机械臂。它包括n根传动轴,n为除零以外的自然数,n根传动轴通过n-1个万向节串接铰连成机械臂,并通过与n-1个伞齿轮传动副机构相联接,实现等曲率弯曲传动。本发明结构简单,所用零件大多完全相同,仅需单个驱动源就可完成所需等曲率弯曲传动要求。
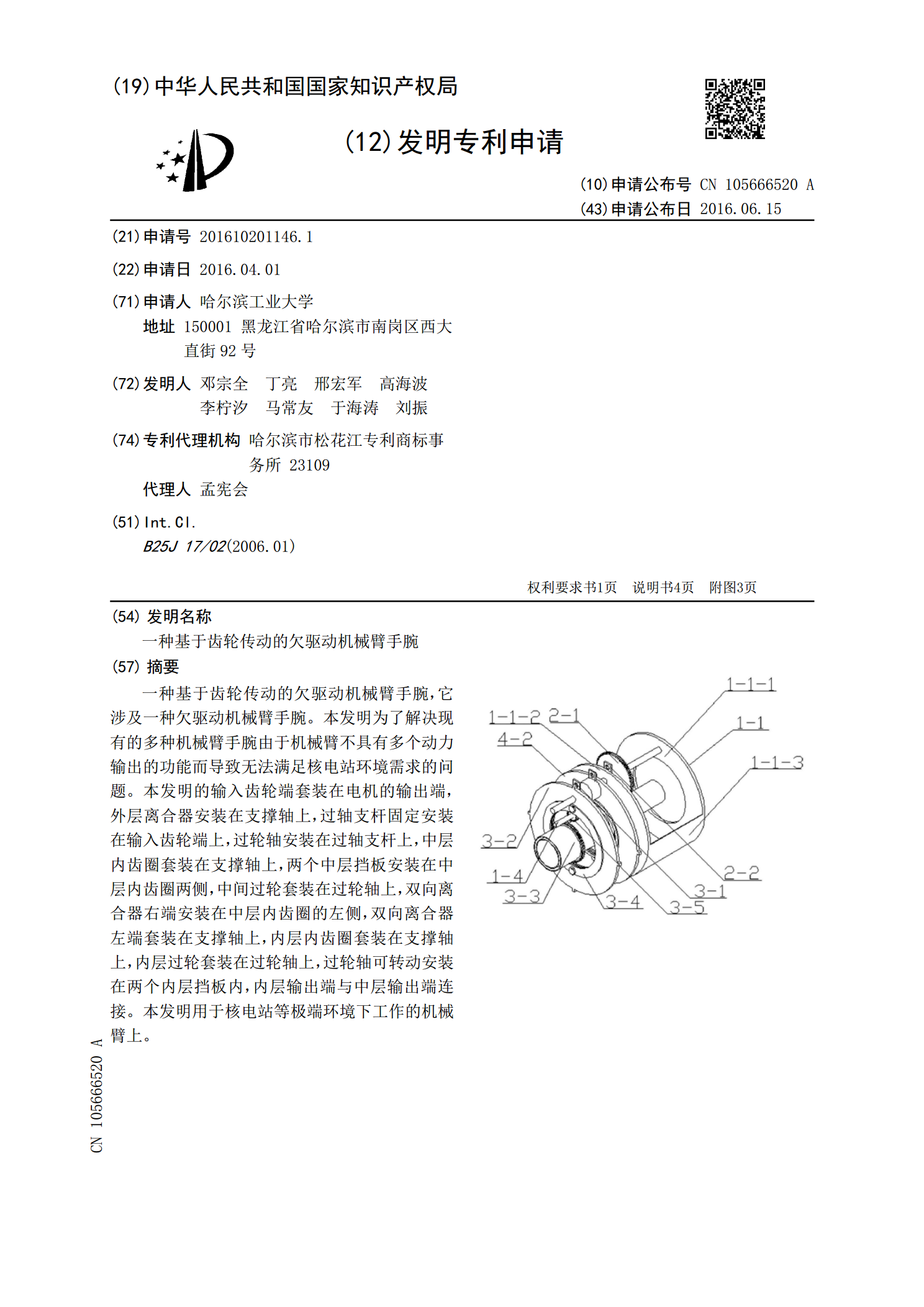
一种基于齿轮传动的欠驱动机械臂手腕.pdf
一种基于齿轮传动的欠驱动机械臂手腕,它涉及一种欠驱动机械臂手腕。本发明为了解决现有的多种机械臂手腕由于机械臂不具有多个动力输出的功能而导致无法满足核电站环境需求的问题。本发明的输入齿轮端套装在电机的输出端,外层离合器安装在支撑轴上,过轴支杆固定安装在输入齿轮端上,过轮轴安装在过轴支杆上,中层内齿圈套装在支撑轴上,两个中层挡板安装在中层内齿圈两侧,中间过轮套装在过轮轴上,双向离合器右端安装在中层内齿圈的左侧,双向离合器左端套装在支撑轴上,内层内齿圈套装在支撑轴上,内层过轮套装在过轮轴上,过轮轴可转动安装在两

齿轮传动机构及机械臂连接结构.pdf
一种齿轮传动机构,其包括壳体及相邻装设于该壳体内的第一传动组件、第二传动组件及齿轮间隙调节组件。该第一传动组件包括输入轴及套设于该输入轴上的第一传动齿轮,该第二传动组件包括输出轴及套设于该输出轴上的第二传动齿轮。该齿轮间隙调节组件包括装设座、至少一个紧固件及调节轮,该装设座上开设有至少一个调节孔,该装设座通过该至少一个紧固件能够调节地装设于该壳体上并位于该第一传动齿轮及该第二传动齿轮间;该调节齿轮转动地套设于该装设座上并与该第一传动齿轮及该第二传动齿轮相啮合。通过调节该至少一个紧固件于相应调节孔中的位置,