
一种双轮自平衡机器人.pdf

一吃****昕靓


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双轮自平衡机器人.pdf
本发明公开了一种双轮自平衡机器人,通过在机械结构上的改进,解决了现有技术中机器人只能在平缓地面运行,行驶有局限性的技术问题。所述双轮自平衡机器人包括车体,所述车体两侧安装有车轮,所述车体包括平行四边形架体,可倾斜变形,所述车体上安装有载物台,所述载物台与平行四边形架体铰接,所述平行四边形架体中安装有第一电机,所述第一电机驱动所述平行四边形架体根据路面情况做倾斜变形,所述载物台始终保持水平。本发明提供的双轮自平衡机器人,可以适应复杂路况,并且载物台始终保持水平,承载的物体不易脱落。

一种双轮自平衡机器人.pdf
本发明提出一种双轮自平衡机器人,包括车体、在车体下端设置有用于行走的双轮行走系统,还包括控制器和充电变形机构,所述充电变形机构设置在所述车体上,所述充电变形机构用于在充电时变形着地实现对双轮自平衡机器人的充电和支撑,非充电状态时收起,所述充电变形机构和所述控制器电连接。通过本发明解决了现有技术中的双轮自平衡机器人存在的充电操作繁琐,能量消耗大的问题。

一种双轮自平衡机器人.pdf
本发明涉及一种双轮自平衡机器人,包括以下组成部分:a.车桥(5)两端设置电机支架(3),电机支架连接减速电机(2)及行走轮(1);b.车桥两端设置弹簧支架(18),其两端分别连接弹簧减震器(4),车桥下方设置箱体(17),箱体四角分别与弹簧减震器连接;c.箱体的前面连接有机械臂(16)、后面连接一个起平衡及越障作用的机械尾,包括尾轮支架(11)及其尾轮(12),尾轮支架(11)中部连接尾轮舵机(13),舵机输出轴固定到尾轮U形架(10)上,并通过由U形架(9)驱动舵机(8)组成的驱动单元连接于箱体(17)
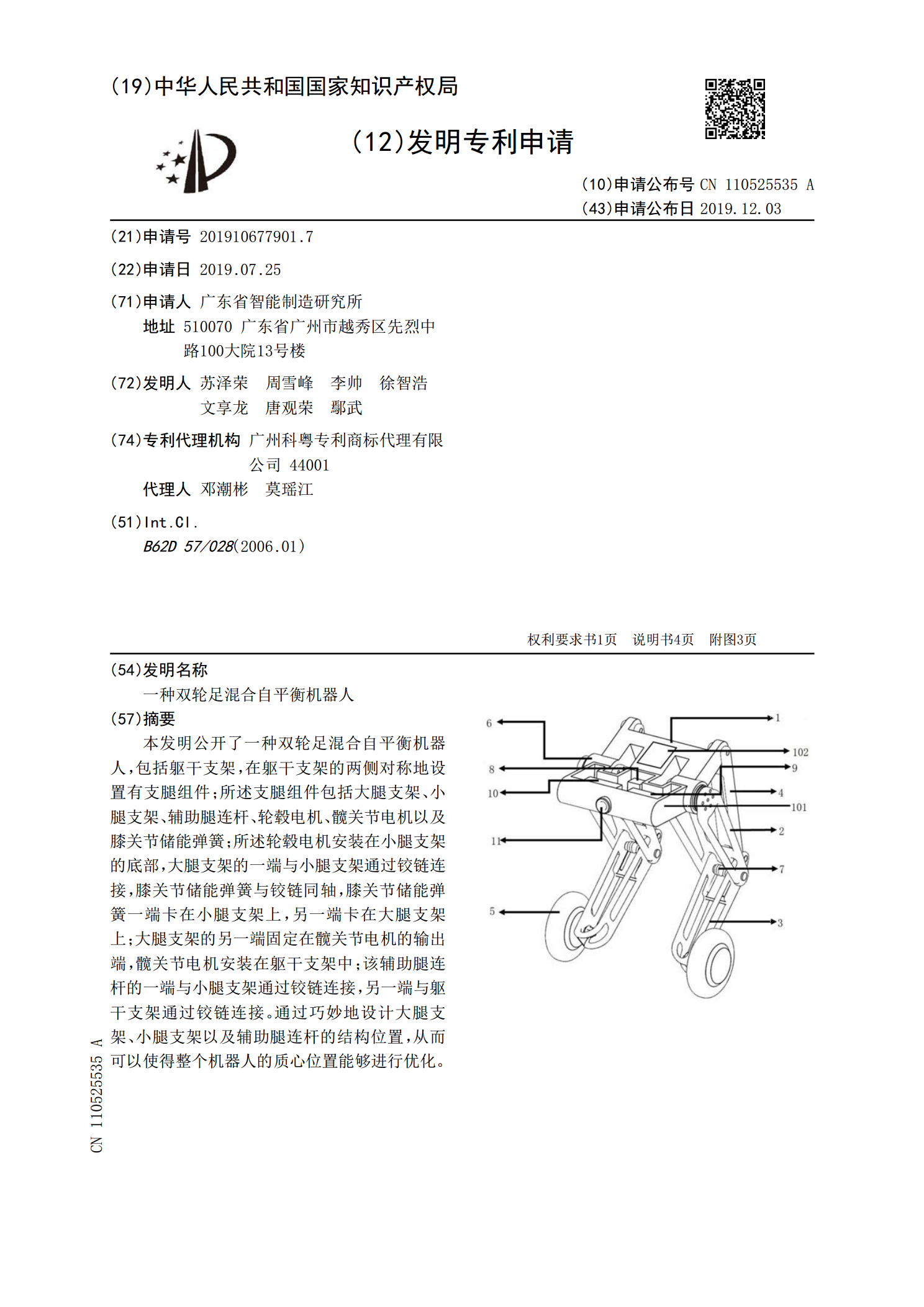
一种双轮足混合自平衡机器人.pdf
本发明公开了一种双轮足混合自平衡机器人,包括躯干支架,在躯干支架的两侧对称地设置有支腿组件;所述支腿组件包括大腿支架、小腿支架、辅助腿连杆、轮毂电机、髋关节电机以及膝关节储能弹簧;所述轮毂电机安装在小腿支架的底部,大腿支架的一端与小腿支架通过铰链连接,膝关节储能弹簧与铰链同轴,膝关节储能弹簧一端卡在小腿支架上,另一端卡在大腿支架上;大腿支架的另一端固定在髋关节电机的输出端,髋关节电机安装在躯干支架中;该辅助腿连杆的一端与小腿支架通过铰链连接,另一端与躯干支架通过铰链连接。通过巧妙地设计大腿支架、小腿支架以
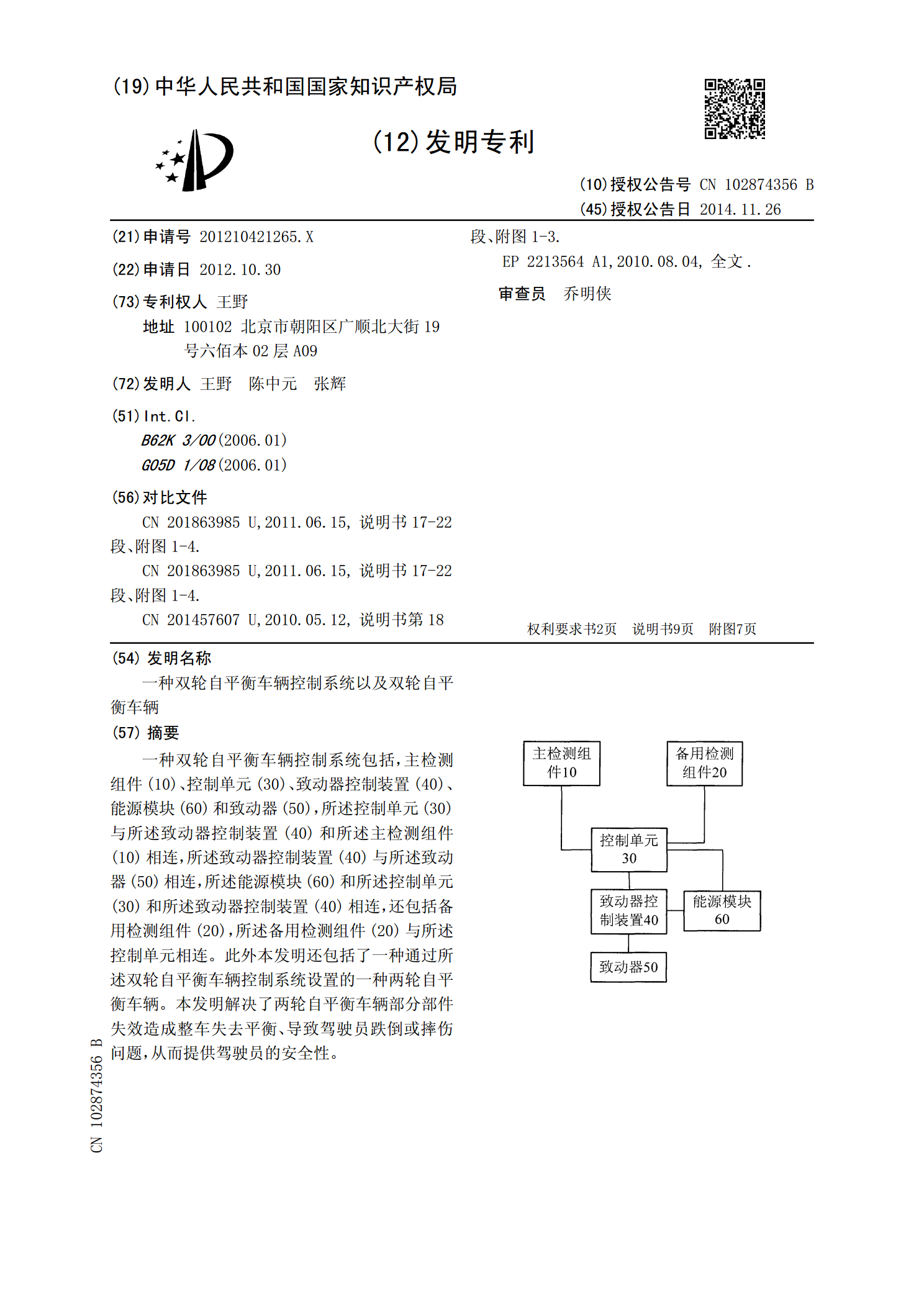
一种双轮自平衡车辆控制系统以及双轮自平衡车辆.pdf
一种双轮自平衡车辆控制系统包括,主检测组件(10)、控制单元(30)、致动器控制装置(40)、能源模块(60)和致动器(50),所述控制单元(30)与所述致动器控制装置(40)和所述主检测组件(10)相连,所述致动器控制装置(40)与所述致动器(50)相连,所述能源模块(60)和所述控制单元(30)和所述致动器控制装置(40)相连,还包括备用检测组件(20),所述备用检测组件(20)与所述控制单元相连。此外本发明还包括了一种通过所述双轮自平衡车辆控制系统设置的一种两轮自平衡车辆。本发明解决了两轮自平衡车辆