
一种全地形森林消防侦查机器人及其应用.pdf

志玉****爱啊


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全地形森林消防侦查机器人及其应用.pdf
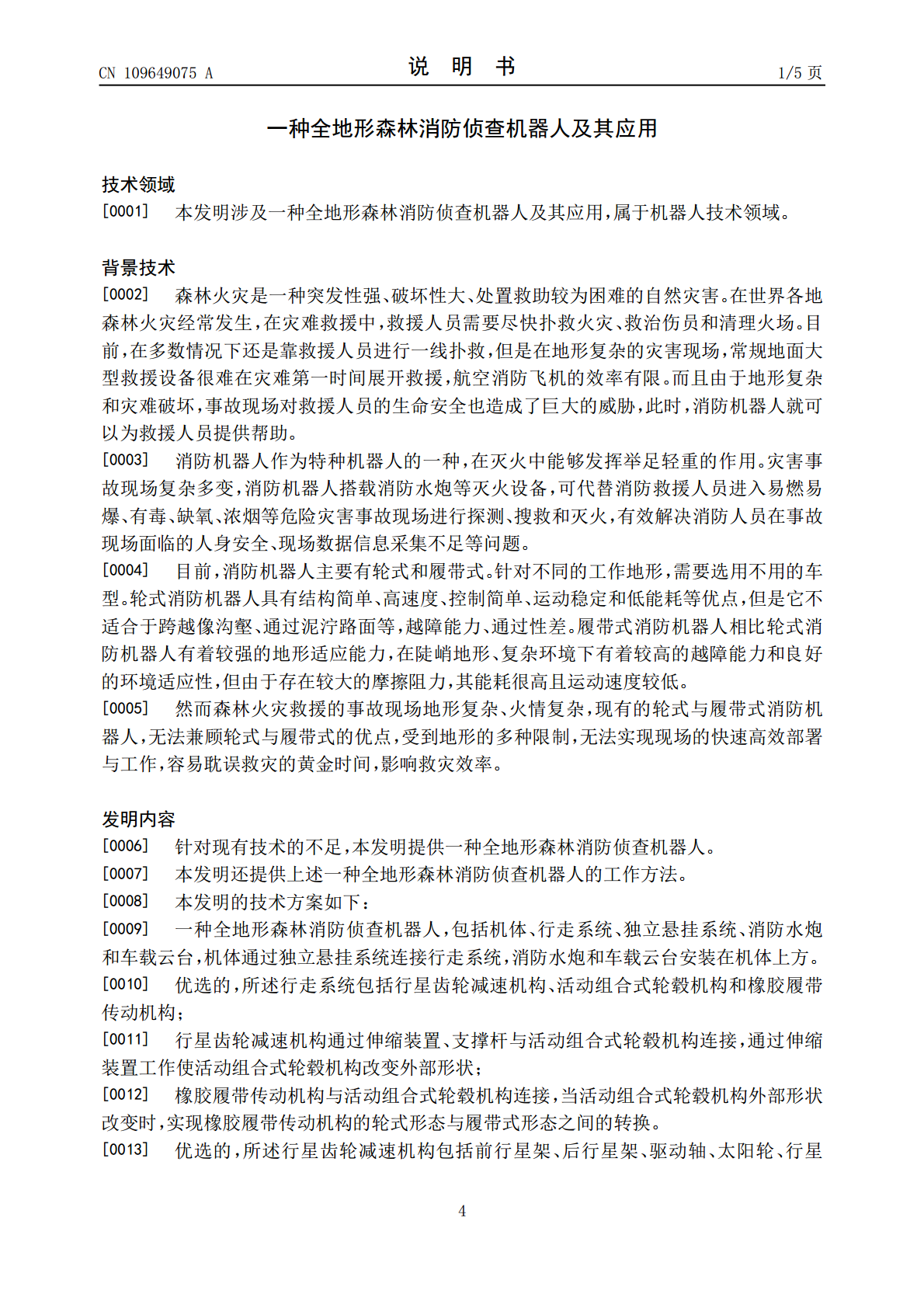
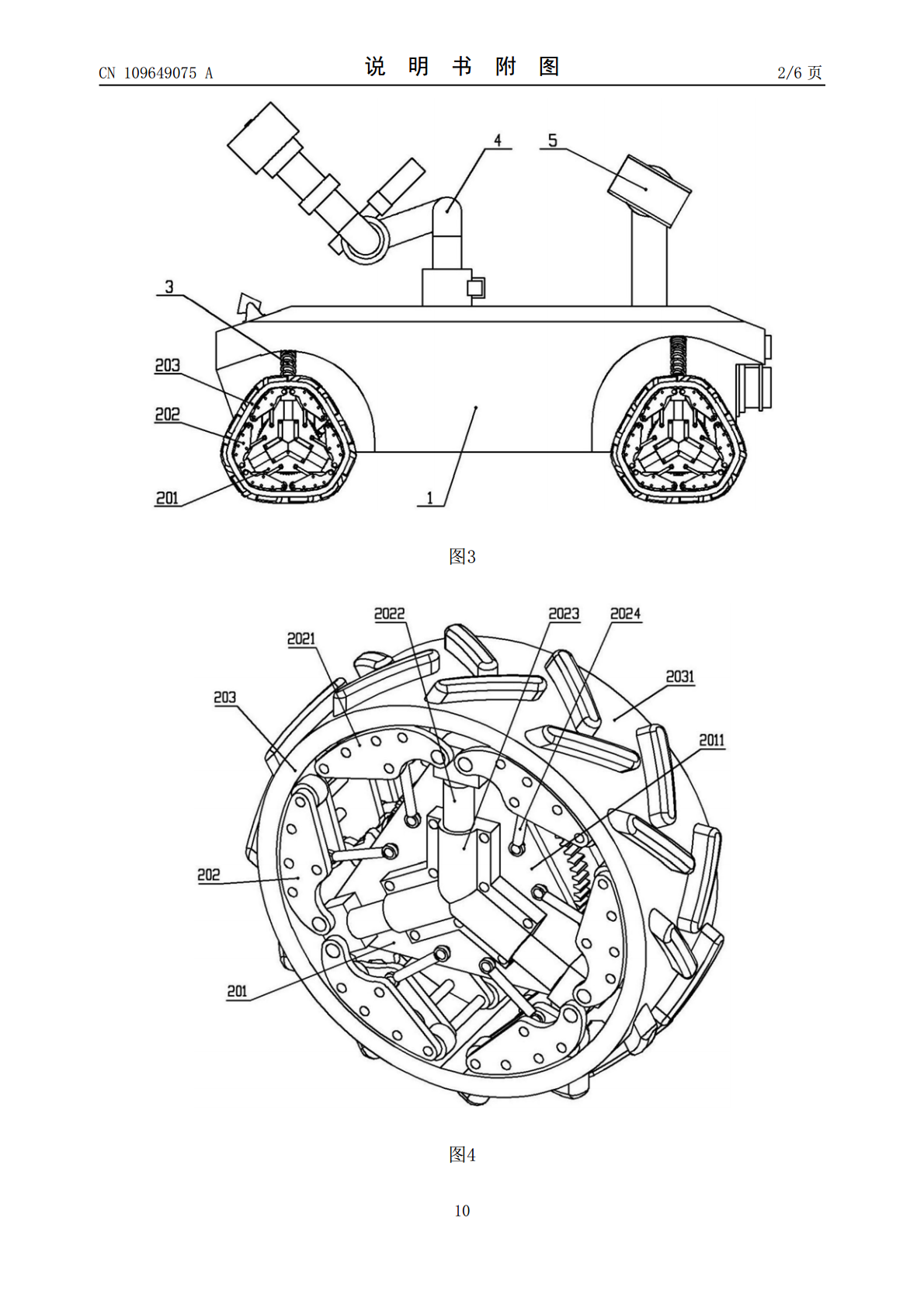
本发明涉及一种全地形森林消防侦查机器人及其应用,包括机体、行走系统、独立悬挂系统、消防水炮和车载云台,机体通过独立悬挂系统连接行走系统,消防水炮和车载云台安装在机体上方。本发明全地形森林消防侦查机器人采用新型行走系统,其与独立悬挂系统、消防水炮和车载云台配合,可实现消防侦查机器人根据不同工况快速转换轮式与履带式形态,在平坦硬路面上,转换成轮式形态,从而提高行驶速度,降低功率消耗;在松软地面上,转换成履带式形态,从而增大接地面积,提高牵引力,提高通过性、机动性与工作效率,进而使消防侦查机器人能够快速高效的进

全地形消防侦查与隔离带开辟机器人研究.docx
全地形消防侦查与隔离带开辟机器人研究随着城市化进程的不断加速以及各种自然灾害的不断发生,火灾成为了现代生活中极为常见和危险的事故之一。火灾的爆发以及扩散与人们日常生活使用的各种材料相关,因此在火灾发生后采取不同的应对措施将对灾害的发展产生不同的影响。尤其是在火灾的初期,对火源的迅速判别和有效的隔离将会对灾害的扩散产生直接的影响,因此消防侦查与隔离带开辟机器人成为了实现消防部门火灾处置的重要装备之一。这种机器人能够利用自身优良的机动性和智能控制系统,在火灾发生后及时进入火灾现场,并通过各种传感器技术,发现火

一种全地形消防机器人.pdf
本发明公开了一种全地形消防机器人,属于消防设备技术领域。本发明包括车身,以及安装在车身底部的车轮,所述车轮包括轮毂和链轮,且所述轮毂与链轮之间通过气弹簧相连,所述链轮由多个链板铰接而成;所述车身前端顶部安装有消防水炮。本发明通过将消防机器人的车轮设计成一半径可变结构,且与地面相接触的链轮由多块链板铰接而成,行走时提高车轮的抓地性能,从而提高行走速度,使得消防机器人能够及时的到达火灾现场。

一种消防机器人的全地形轮.pdf
本发明公开了一种消防机器人的全地形轮,属于消防机器人车轮设计技术领域。本发明包括轮毂、链板和气弹簧,所述链板设有多个,且多个链板之间通过铰接组成链轮;所述链轮通过气弹簧与轮毂相连。本发明通过将全地形轮与地面接触的链轮设计成多块链板铰接而成,且链轮与轮毂之间通过气弹簧进行连接,全地形轮在山区行走时,由于气弹簧的存在,改变全地形轮与地面的接触面积,从而增加全地形轮的抓地性。

一种全地形运输机器人及其控制方法.pdf
本发明揭示了一种全地形运输机器人,机器人设有车体,所述车体后端固定有后轮架,所述车体前端两侧设有前履带轮,所述后轮架两侧设有后履带轮,所述车体内设有为前履带轮和后履带轮的动力驱动单元供电的电池,所述车体内设有控制器,所述控制器设有与遥控装置无线通信的通信单元,所述控制器输出驱动信号至动力驱动单元,两个所述前履带轮的后端固接在转轴的两端,所述转轴通过轴承固定在车体上,两个所述前履带轮为向车体前上方弯折的L形履带轮,每个所述后履带轮由两个条形履带轮呈倒V形固定构成本发明的优点在于机器人(小车)能够适应不同的地