
主动复合变阻尼转动控制装置.pdf

新槐****公主


1/8

2/8

3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动复合变阻尼转动控制装置.pdf
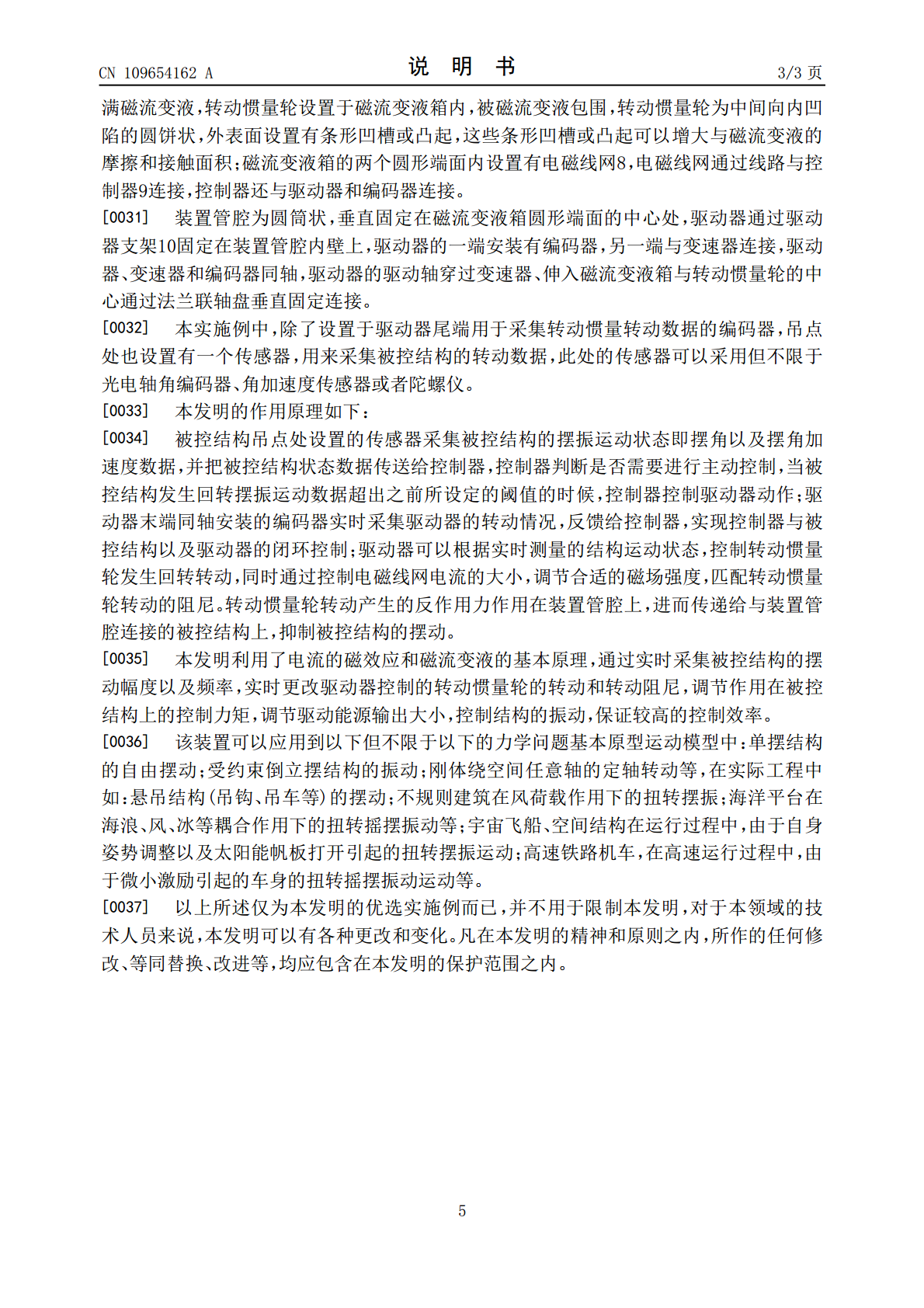
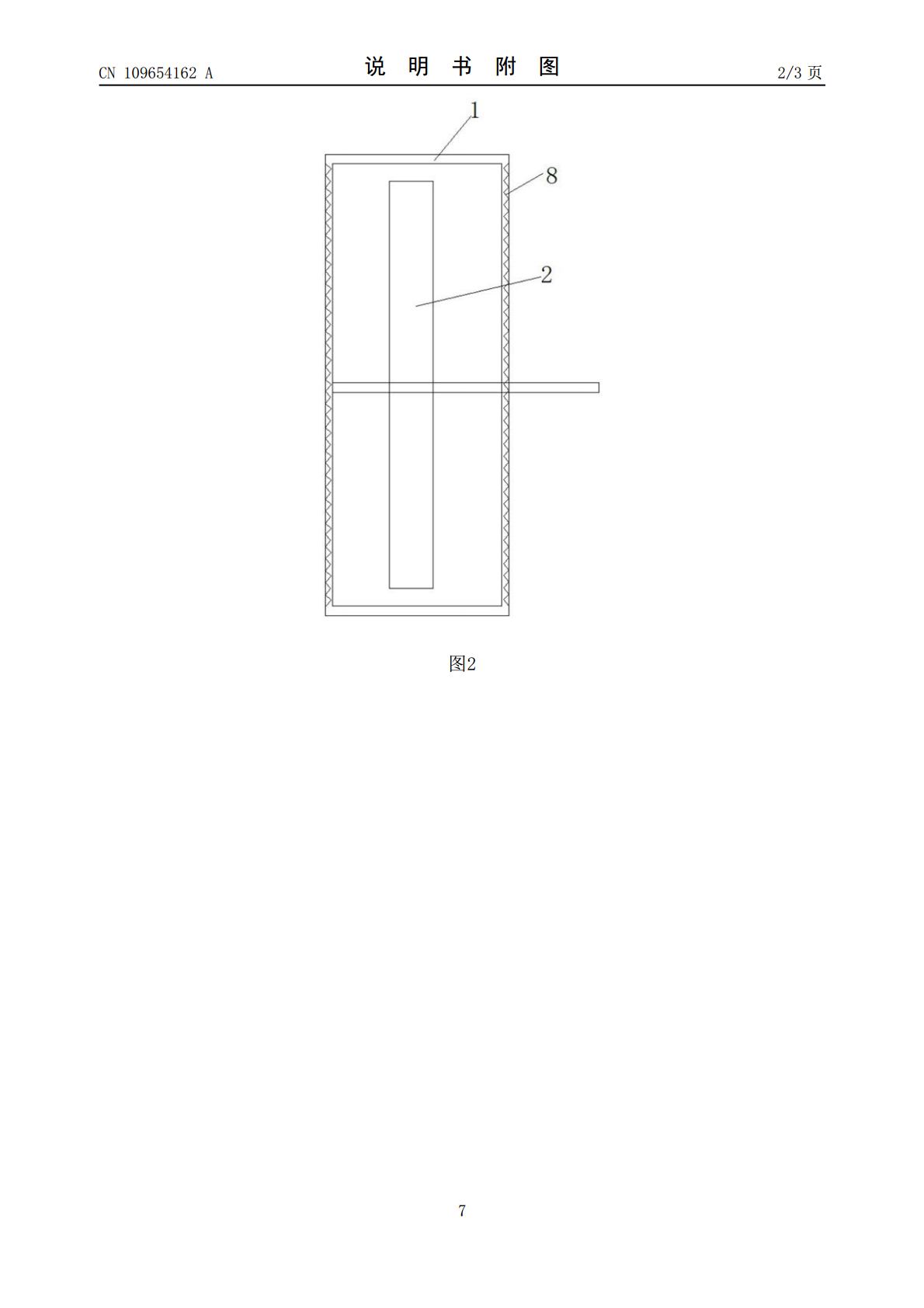
本发明涉及系统中振动的抑制领域,公开了一种主动复合变阻尼转动控制装置,其包括变阻尼模块和动力模块;变阻尼模块包括磁流变液箱和转动惯量轮,磁流变液箱内部填充满磁流变液,转动惯量轮设置于磁流变液箱内,磁流变液箱的两个圆形端面内设置有电磁线网;动力模块包括装置管腔、驱动器、编码器和变速器,驱动器固定在装置管腔内壁上,驱动器的一端安装有编码器,另一端与变速器连接,驱动器的驱动轴穿过变速器、伸入磁流变液箱与转动惯量轮的中心垂直固定。本发明的转动惯量轮的转动阻尼可以自动调节,调节精度高,调节范围广,系统应用范围大,本

带阻尼液箱的转动惯量主动控制装置.pdf
本发明涉及系统中振动的抑制领域,具体而言,涉及一种带阻尼液箱的转动惯量主动控制装置,其包括出力模块以及阻尼液箱;出力模块直接固定在被控结构上,主要包括底座、编码器、驱动器、变速器、连接轴及转动惯量盘;阻尼液箱包括箱体以及箱盖,箱体下端开有安装圆孔,箱盖上开有进液孔,进液孔上带有封盖,被控结构上安装有编码器;本发明可以通过结构的实际运动情况,控制装置的转动惯量轮盘旋转,从而提供合适的作用于受控结构上的力,达到振动控制的目的,且该系统带有阻尼液箱,可以根据实际需要改变阻尼液箱内阻尼液的类型,从而改变转动惯量轮
大型渡槽结构主动变阻尼控制研究.pptx
汇报人:CONTENTS添加章节标题研究背景与意义渡槽工程的重要性传统阻尼控制方法的局限性主动变阻尼控制技术的优势与前景研究内容与方法研究目标与主要内容主动变阻尼控制策略设计数值模拟与实验验证关键技术与创新点研究结果与分析数值模拟结果与对比分析实验验证结果与对比分析经济效益与社会效益评估对未来研究的展望与建议结论与贡献研究结论总结对渡槽工程领域的贡献对阻尼控制技术发展的推动作用对未来研究的指导意义汇报人:

大型渡槽结构主动变阻尼控制研究.docx
大型渡槽结构主动变阻尼控制研究一、引言大型渡槽作为城市道路交通的重要组成部分,其在保障市民安全出行、缓解交通压力等方面具有不可替代的作用。然而,由于渡槽结构体系独特,存在固有的结构振动问题,这些振动问题可能会给人们的出行和居住带来诸多不便。因此,对于大型渡槽结构的振动控制问题,一直是工程技术领域的研究热点。随着科学技术的不断发展和进步,各种新型的振动控制技术相继出现。其中,主动变阻尼控制技术(ActiveVariableDampingControl,AVDC)由于其简单、灵活、高性能等优点,已成为控制渡槽
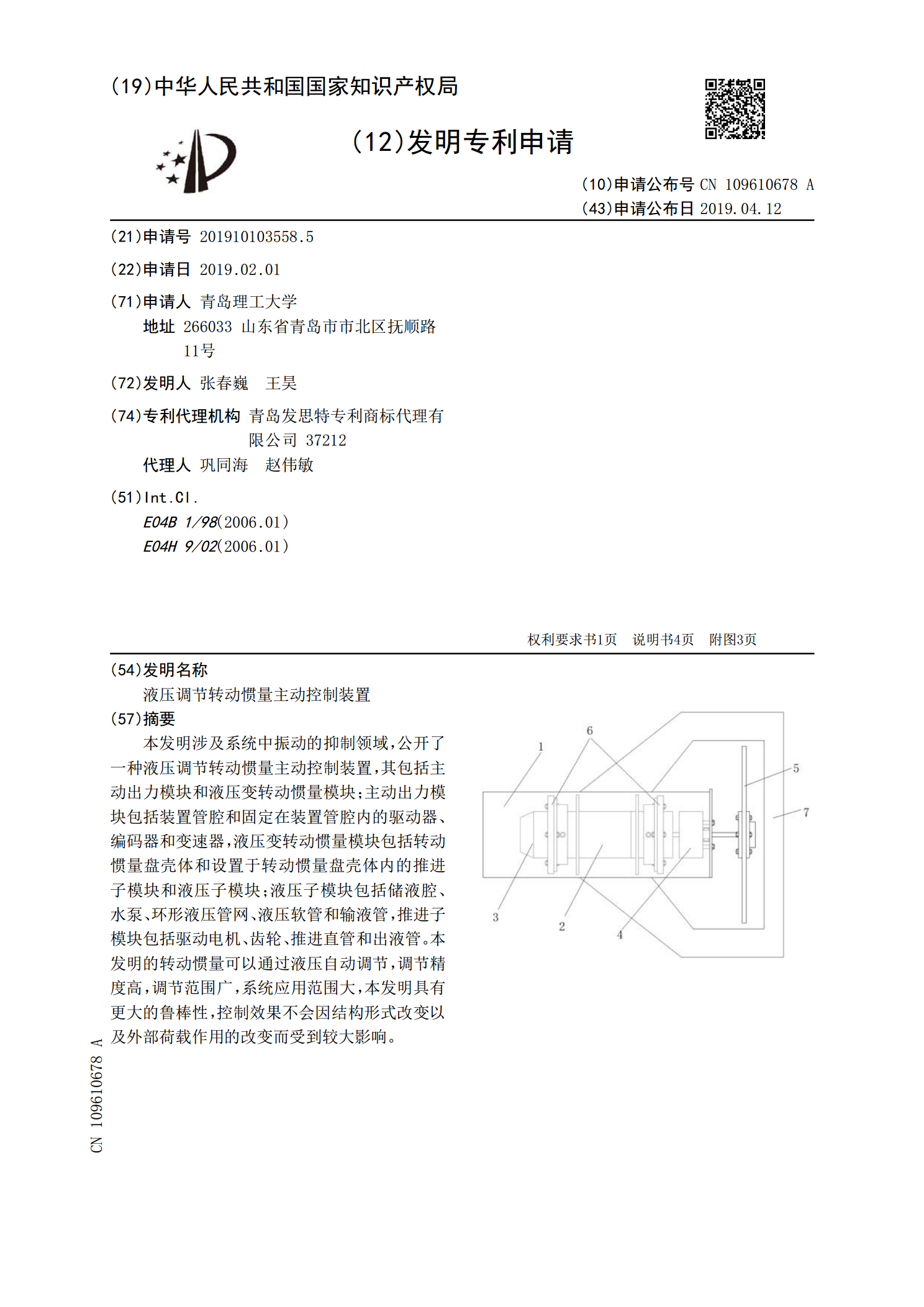
液压调节转动惯量主动控制装置.pdf
本发明涉及系统中振动的抑制领域,公开了一种液压调节转动惯量主动控制装置,其包括主动出力模块和液压变转动惯量模块;主动出力模块包括装置管腔和固定在装置管腔内的驱动器、编码器和变速器,液压变转动惯量模块包括转动惯量盘壳体和设置于转动惯量盘壳体内的推进子模块和液压子模块;液压子模块包括储液腔、水泵、环形液压管网、液压软管和输液管,推进子模块包括驱动电机、齿轮、推进直管和出液管。本发明的转动惯量可以通过液压自动调节,调节精度高,调节范围广,系统应用范围大,本发明具有更大的鲁棒性,控制效果不会因结构形式改变以及外部