
五轴联动机床动态与静态误差综合检测方法.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

五轴联动机床动态与静态误差综合检测方法.pdf
本发明公开了一种五轴联动机床动态与静态误差综合检测方法,其特征是在五轴联动机床加工精度检测试件进行精度检测时,通过监测分析加工过程中机床各进给轴实际运动位置,得到动态误差;对精度检测试件实际成型轮廓面进行检测分析,得到实际误差;实际误差是动态误差和静态误差的耦合,对实际误差解耦,得到检测试件加工空间范围内的静态误差分布。本发明通过对一个精度检测试件的加工与检测,可以同时得到沿加工轨迹的动态误差和静态误差分布,实现对五轴联动机床动态误差与静态误差的综合检测,也可为误差综合补偿提供参考和依据。

五轴联动机床动态误差与RTCP分析.docx
五轴联动机床动态误差与RTCP分析五轴联动机床是一种高精度加工设备,由于其结构复杂、动态特性及零件定位误差等因素的影响,会产生一定的动态误差。为了提高五轴联动机床的加工精度,研究和分析其动态误差及RTCP(RotaryTableCenterPoint)是非常重要的。首先,我们来了解五轴联动机床的基本结构和工作原理。五轴联动机床由床身、主轴、工作台、横梁、转台等部件组成。通过这些机床部件的协调运动,可以实现多角度、多工位的加工操作。五轴联动机床具有加工精度高、刚性好等特点,广泛应用于航空航天、汽车、模具等行
基于“S”形检验试件的五轴联动数控机床动态误差检验方法.pdf
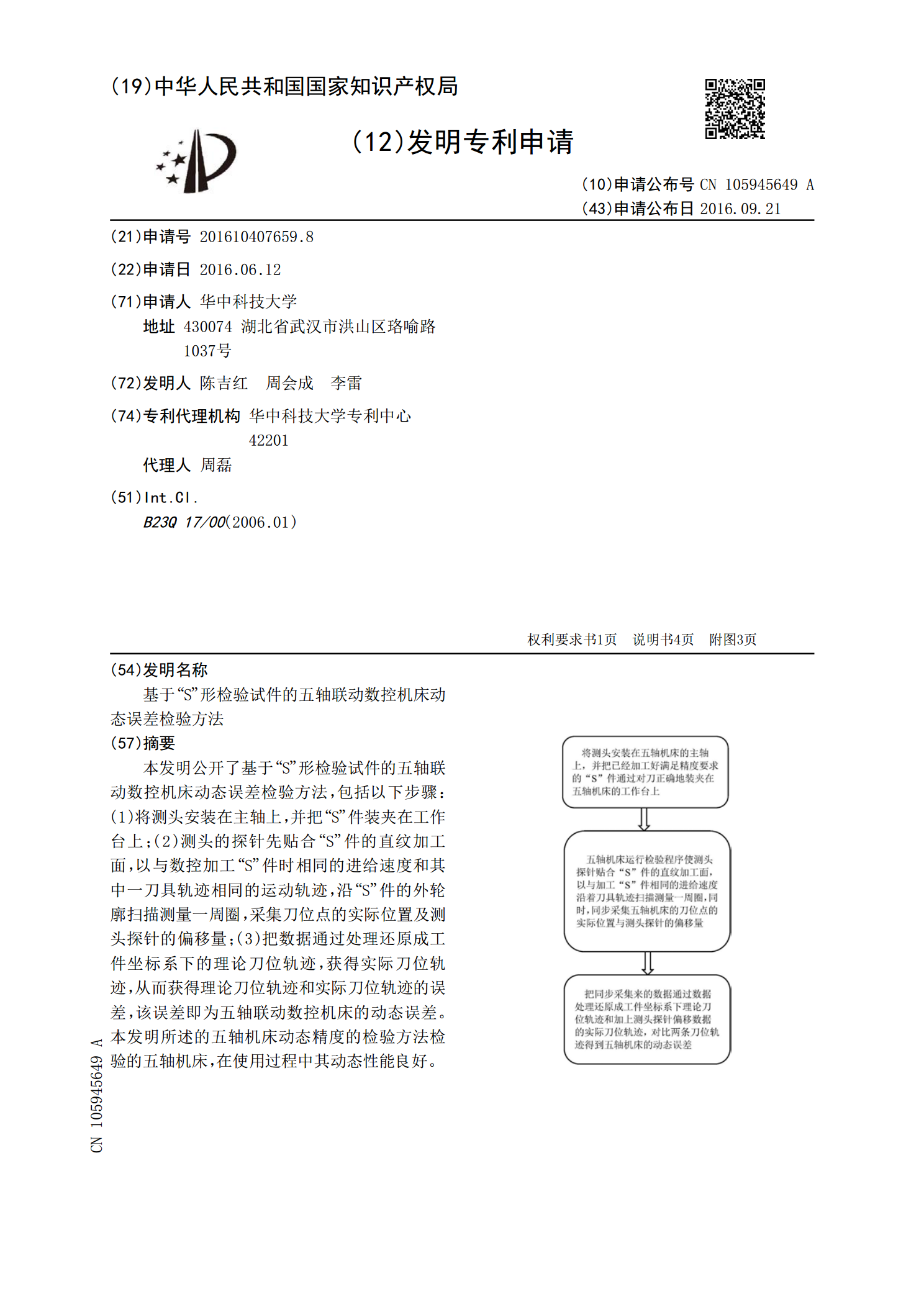
本发明公开了基于“S”形检验试件的五轴联动数控机床动态误差检验方法,包括以下步骤:(1)将测头安装在主轴上,并把“S”件装夹在工作台上;(2)测头的探针先贴合“S”件的直纹加工面,以与数控加工“S”件时相同的进给速度和其中一刀具轨迹相同的运动轨迹,沿“S”件的外轮廓扫描测量一周圈,采集刀位点的实际位置及测头探针的偏移量;(3)把数据通过处理还原成工件坐标系下的理论刀位轨迹,获得实际刀位轨迹,从而获得理论刀位轨迹和实际刀位轨迹的误差,该误差即为五轴联动数控机床的动态误差。本发明所述的五轴机床动态精度的检验方

一种五轴联动机床动态精度检测及优化方法.docx
一种五轴联动机床动态精度检测及优化方法一种五轴联动机床动态精度检测及优化方法摘要随着五轴联动机床在制造业中的应用越来越广泛,对其动态精度的要求也日益高涨。本文针对五轴联动机床的动态精度进行了研究,提出了一种检测及优化方法,以提高机床的加工精度和效率。关键词:五轴联动机床,动态精度,检测,优化,加工精度1.引言五轴联动机床是一种高精度的机床,广泛应用于航空、航天、汽车等行业。随着制造业向高精度、高效率方向发展,对五轴联动机床的动态精度要求也越来越高。动态精度是机床加工过程中的重要指标,对于提高加工精度、降低

五轴联动数控加工的装夹误差动态补偿方法.docx
五轴联动数控加工的装夹误差动态补偿方法五轴联动数控加工是一种高精度、高效率的加工方法,广泛应用于航空、航天、汽车、模具等领域。但是由于加工装夹误差的存在,在加工过程中会引起加工件的装夹误差,导致加工结果偏差,影响加工质量。因此,对五轴联动数控加工的装夹误差进行动态补偿是提高加工精度和质量的关键技术。本文将从装夹误差的来源、五轴联动数控加工的装夹误差动态补偿原理和方法、补偿效果及存在的问题进行详细探讨。一、装夹误差的来源装夹误差是指在加工过程中由于工件与夹具之间存在相对位移而引起的偏差。主要有以下几个方面的