
垂直起降固定翼巡线无人机.pdf

小云****66

1/9
2/9
3/9

4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
垂直起降固定翼巡线无人机.pdf
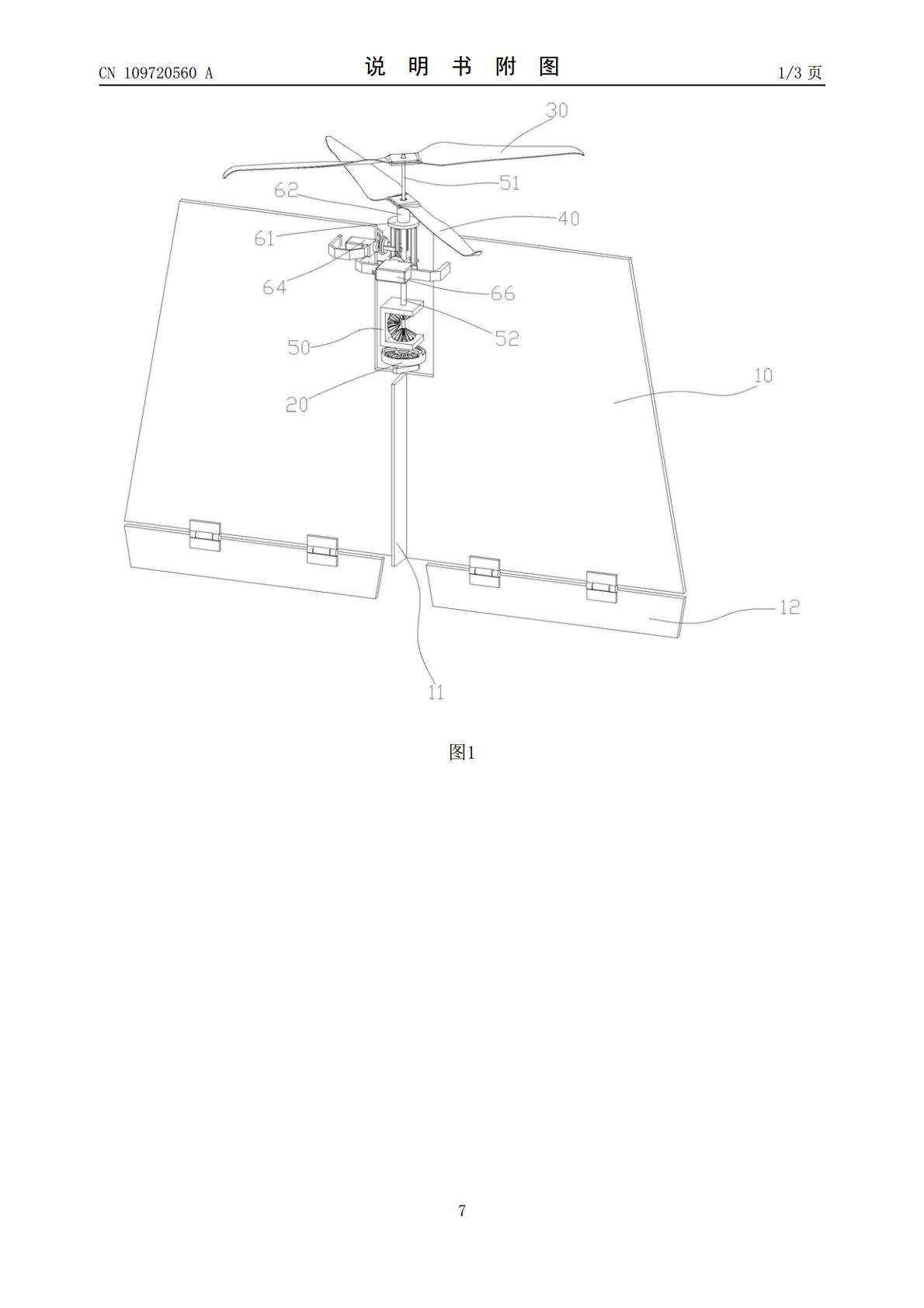
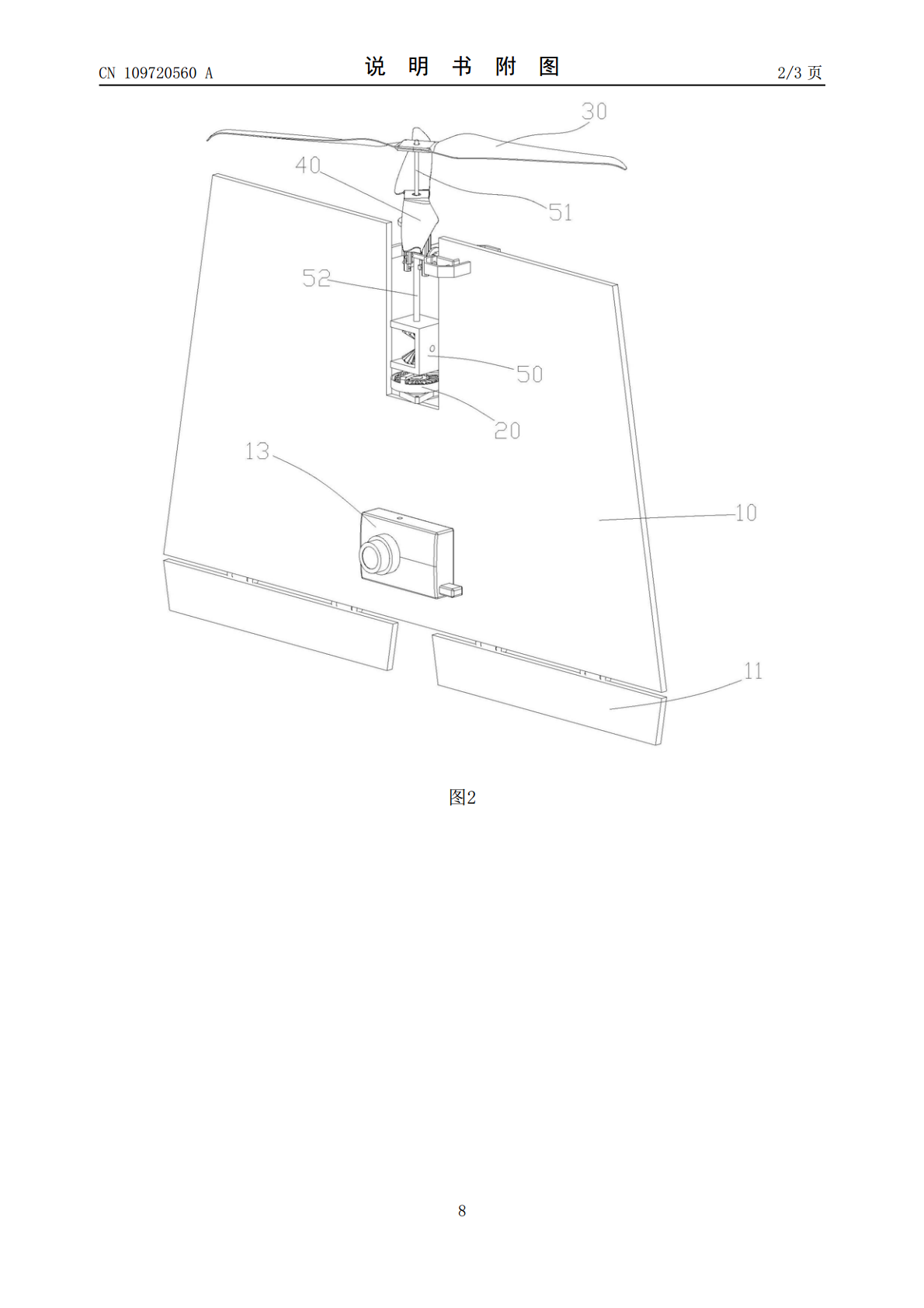
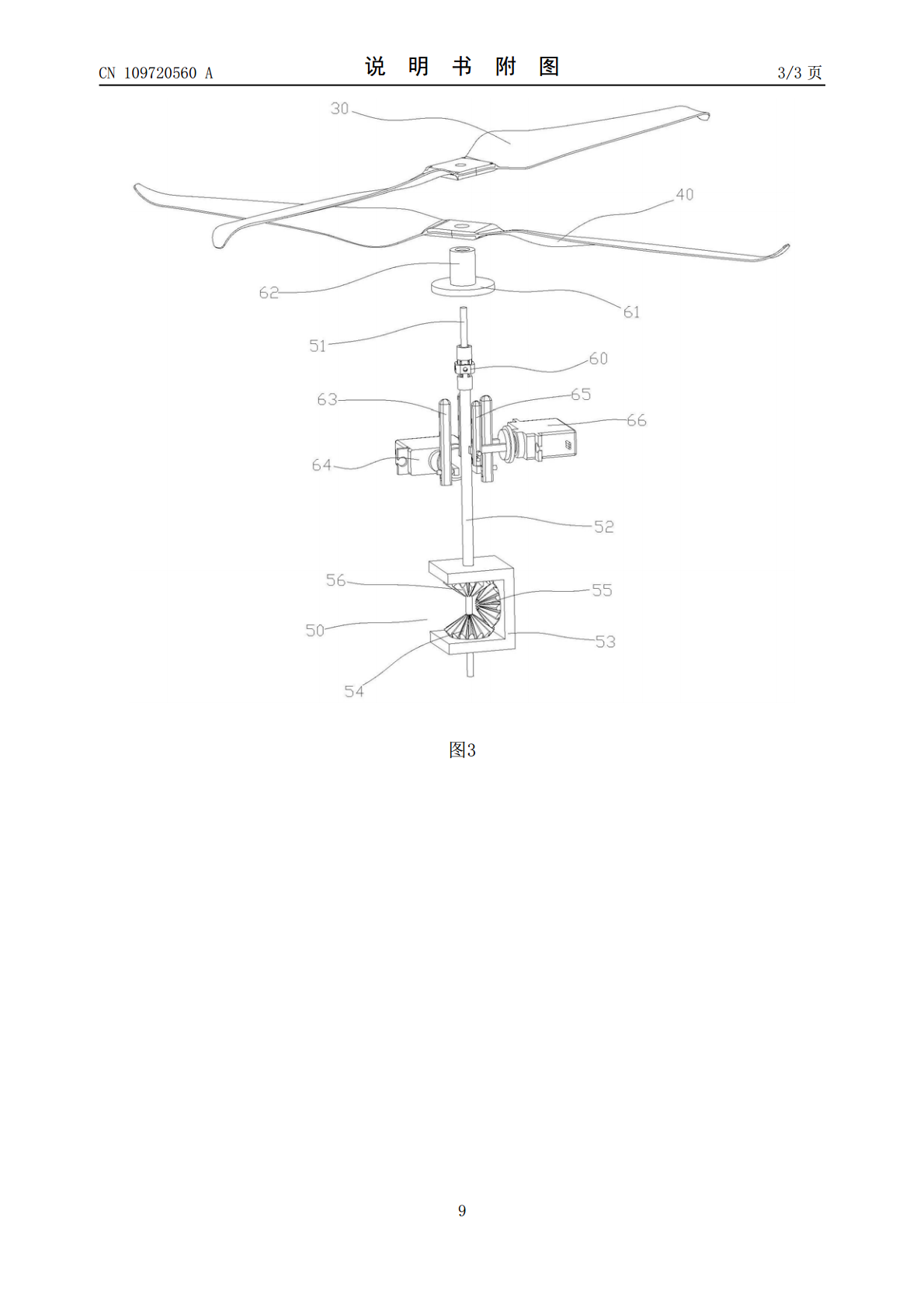
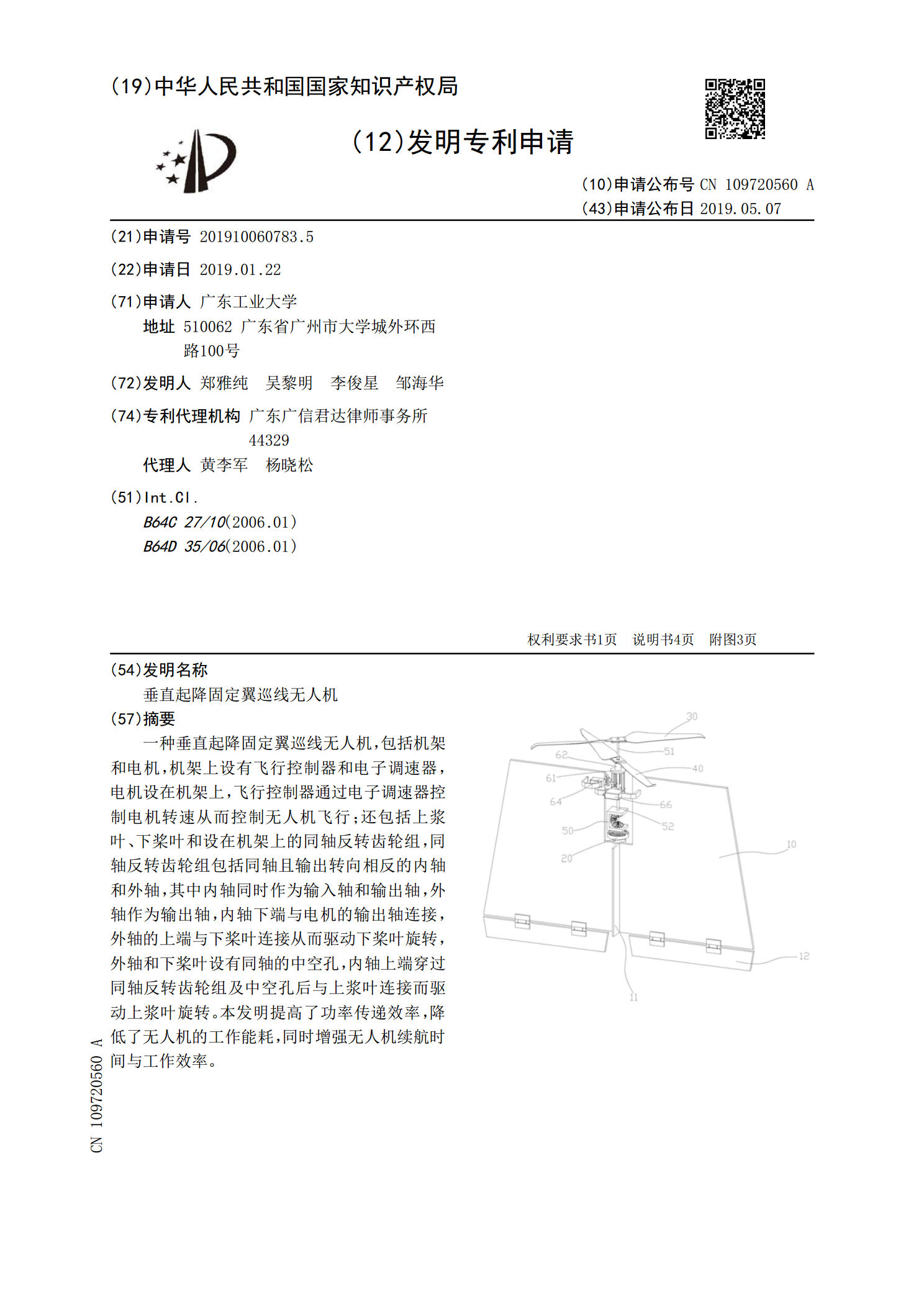
一种垂直起降固定翼巡线无人机,包括机架和电机,机架上设有飞行控制器和电子调速器,电机设在机架上,飞行控制器通过电子调速器控制电机转速从而控制无人机飞行;还包括上浆叶、下桨叶和设在机架上的同轴反转齿轮组,同轴反转齿轮组包括同轴且输出转向相反的内轴和外轴,其中内轴同时作为输入轴和输出轴,外轴作为输出轴,内轴下端与电机的输出轴连接,外轴的上端与下桨叶连接从而驱动下桨叶旋转,外轴和下桨叶设有同轴的中空孔,内轴上端穿过同轴反转齿轮组及中空孔后与上浆叶连接而驱动上浆叶旋转。本发明提高了功率传递效率,降低了无人机的工作

用于电力巡线的垂直起降固定翼无人机飞行仿真的开题报告.docx
用于电力巡线的垂直起降固定翼无人机飞行仿真的开题报告一、题目及研究背景题目:用于电力巡线的垂直起降固定翼无人机飞行仿真随着人们对电力安全的要求不断提高,电力巡检的工作也越来越重要。传统的电力巡线方式是由人工巡线或者直升机巡线,但是这种方式存在一些问题。人工巡线工作量大,耗时长且不安全,而直升机巡线需要高空飞行,成本高且受天气影响较大。随着无人机技术的日益成熟,其在电力巡检领域的应用越来越广泛,而垂直起降固定翼无人机则是当前研究的热点。垂直起降固定翼无人机能够在狭小空间内垂直起降,减少起降距离,提高巡检灵活

垂直起降固定翼电力巡线无人机飞控系统的设计的任务书.docx
垂直起降固定翼电力巡线无人机飞控系统的设计的任务书任务书:垂直起降固定翼电力巡线无人机飞控系统的设计一、任务背景电力行业对无人机的需求越来越大,其中最需要的就是电力巡线无人机。传统的电力巡线方式需要在人员比较危险的地方进行巡线,存在安全隐患和工作弊端。而无人机则可以利用机载设备和摄像头进行全方位视察,在缩短检测周期、提高效率的同时也可以保障人员的安全。但传统固定翼无人机需要相对平整的地面进行起降,并且不能进行低空缓慢巡飞,很难满足电力巡线的需求。因此,垂直起降固定翼电力巡线无人机飞控系统的设计就显得尤为重

用于电力巡线的垂直起降固定翼无人机飞行仿真的任务书.docx
用于电力巡线的垂直起降固定翼无人机飞行仿真的任务书任务书一、任务目的随着电力行业的快速发展,电力巡线也成为了现代化电力管理的重要环节之一。而无人机作为一种快速、高效、安全的新型巡线方式,正逐渐应用到电力巡线的实践中。本次任务旨在设计一款垂直起降固定翼无人机,用于电力巡线,并完成其飞行仿真模拟,检测无人机在实际巡线任务中的适用性,提高电力巡线的效率和实时性。二、任务内容1.设计一款垂直起降固定翼无人机,实现自主巡线、自主导航、高清影像采集等功能,并能承受不同的环境要求和强风干扰。2.完成垂直起降固定翼无人机
垂直起降固定翼无人机飞行原理.pdf
垂直起降固定翼无人机飞行原理垂直起降固定翼无人机,也被称为VTOL固定翼无人机,是一种具有跨越直升机和传统固定翼无人机两种飞行模式的航空器。这种飞行器既能够在垂直方向起降,又可以在空中以高速飞行,具有灵活性和高效性的特点,因此在军事、工业、民用和科学研究领域都得到了广泛的应用。下文将介绍垂直起降固定翼无人机的飞行原理、组成和应用场景。一、飞行原理垂直起降固定翼无人机的飞行原理可以分为两个部分:一是起降阶段,二是巡航阶段。1.起降阶段在起降阶段,垂直起降固定翼无人机需要利用四个或者多个垂直起降发动机来实现飞