
一种无损碎输送装置及其工作方法.pdf

是你****馨呀

1/9

2/9

3/9

4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无损碎输送装置及其工作方法.pdf
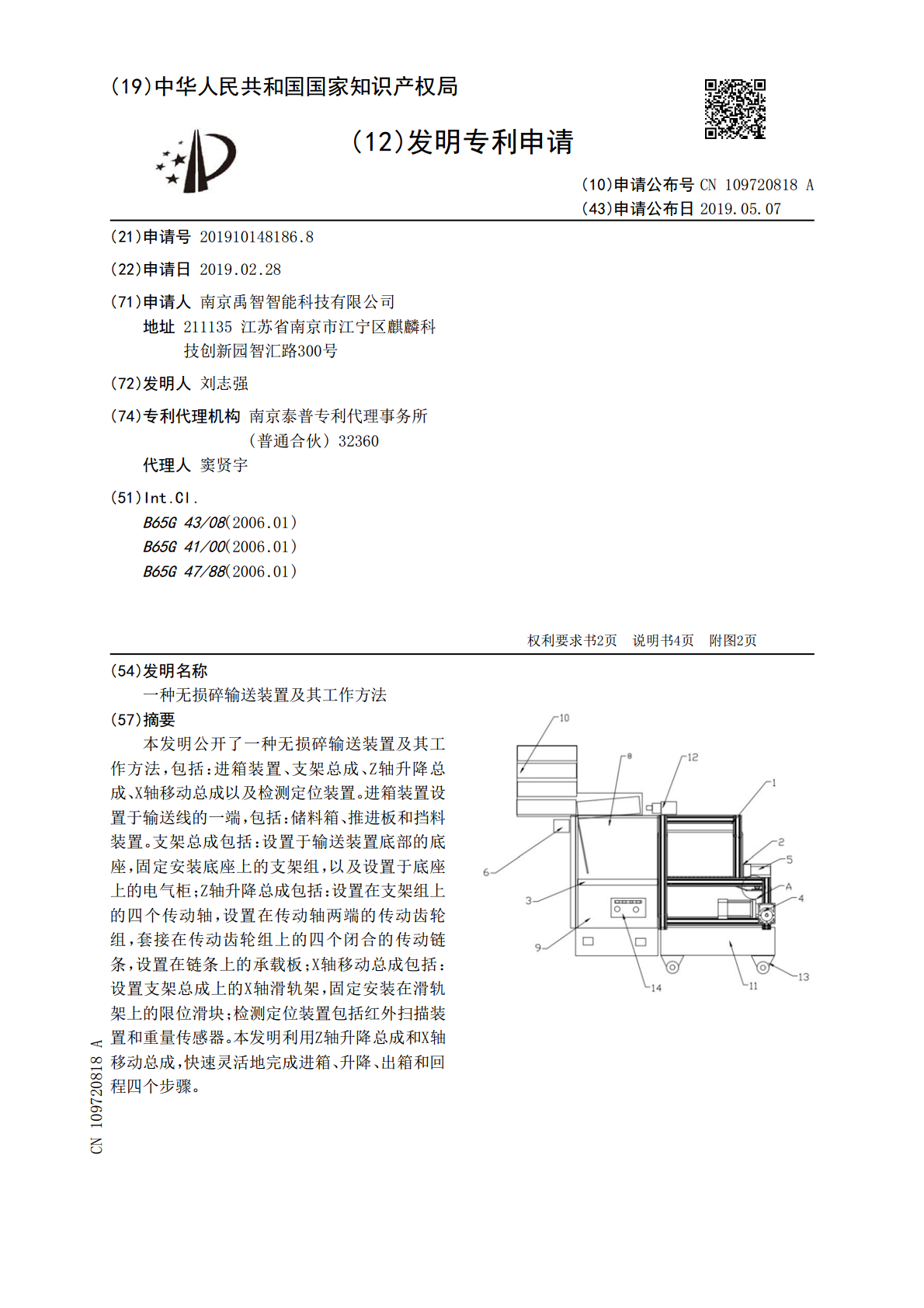
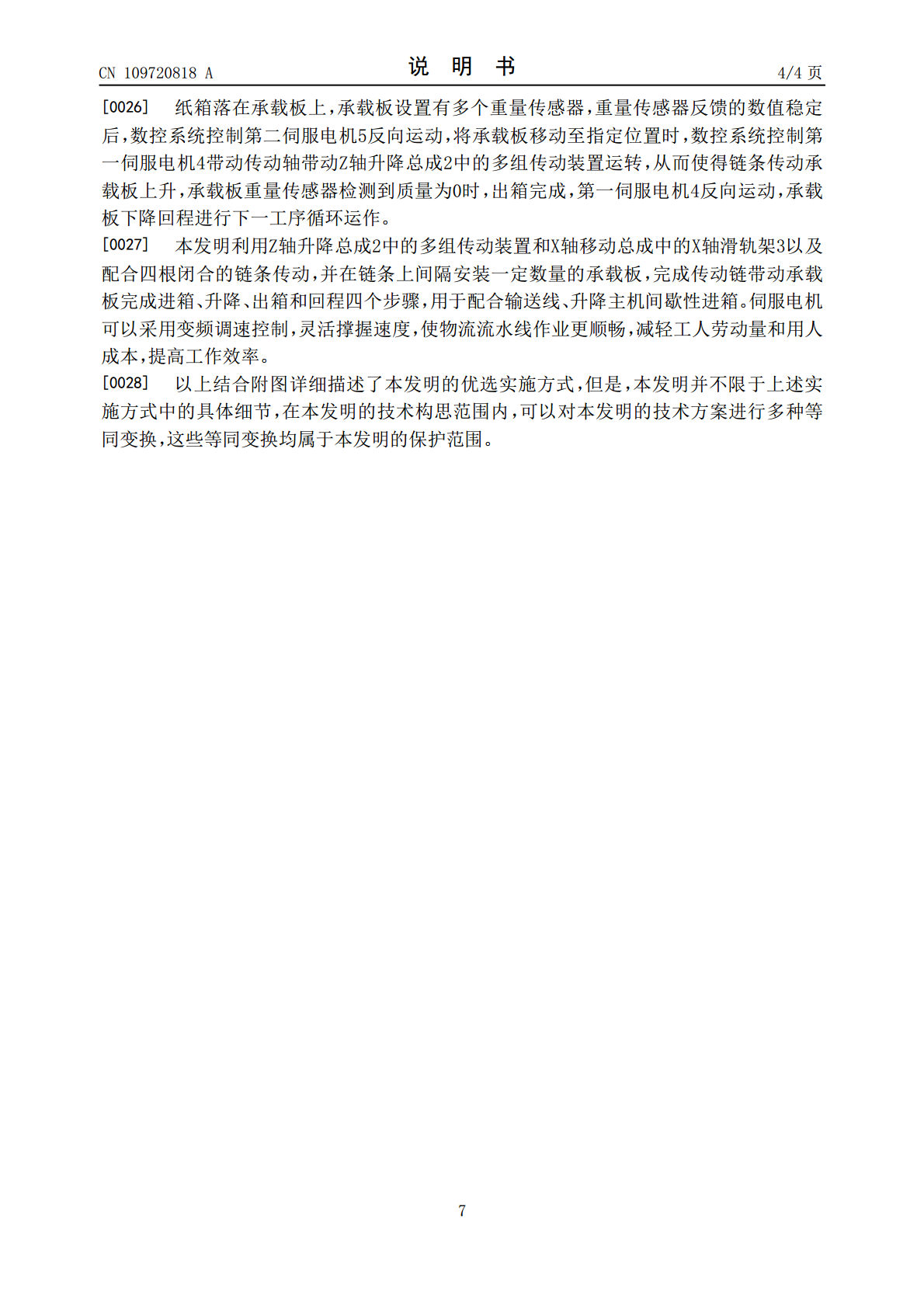
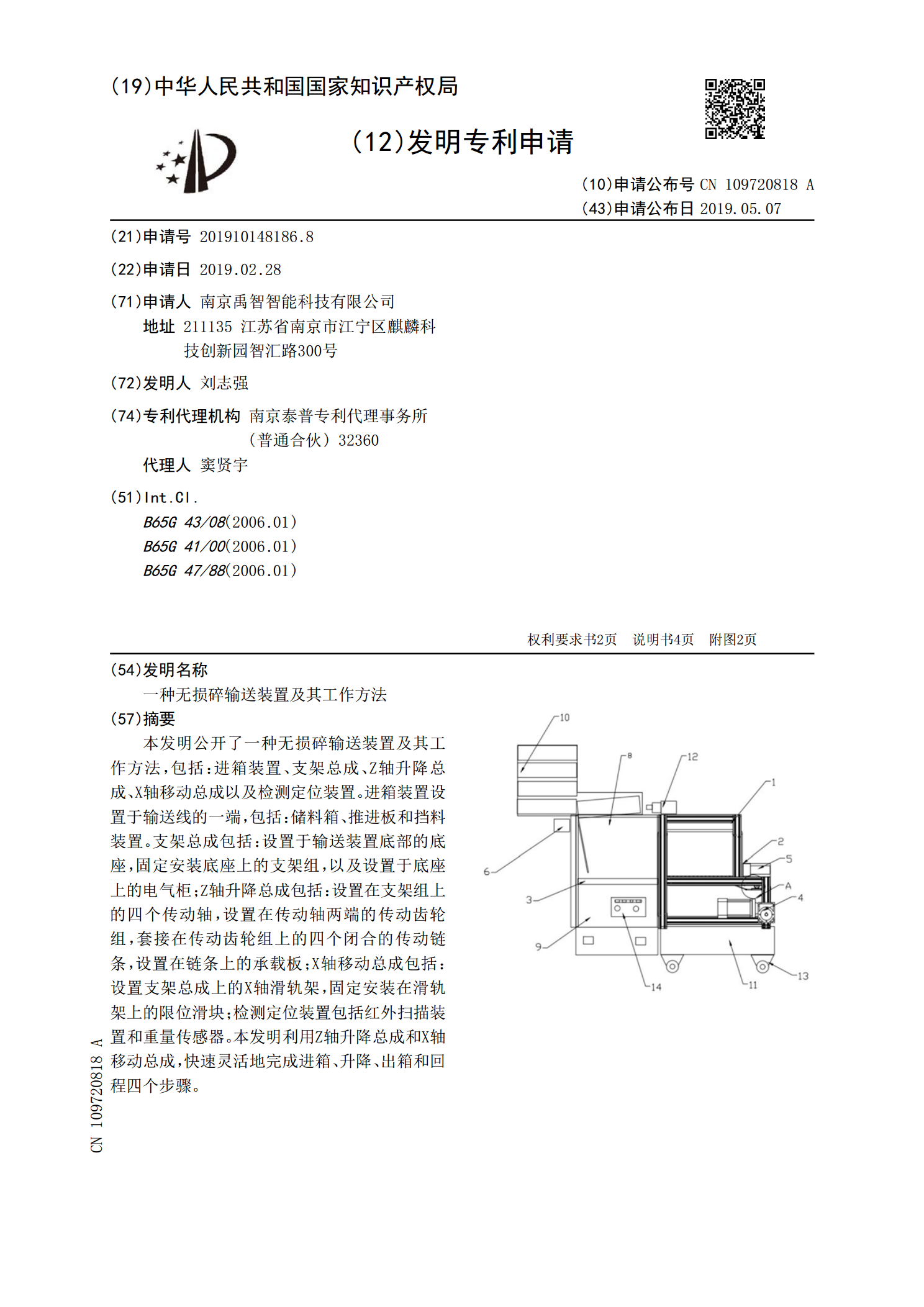
本发明公开了一种无损碎输送装置及其工作方法,包括:进箱装置、支架总成、Z轴升降总成、X轴移动总成以及检测定位装置。进箱装置设置于输送线的一端,包括:储料箱、推进板和挡料装置。支架总成包括:设置于输送装置底部的底座,固定安装底座上的支架组,以及设置于底座上的电气柜;Z轴升降总成包括:设置在支架组上的四个传动轴,设置在传动轴两端的传动齿轮组,套接在传动齿轮组上的四个闭合的传动链条,设置在链条上的承载板;X轴移动总成包括:设置支架总成上的X轴滑轨架,固定安装在滑轨架上的限位滑块;检测定位装置包括红外扫描装置和重
一种输送分隔装置及其工作方法.pdf
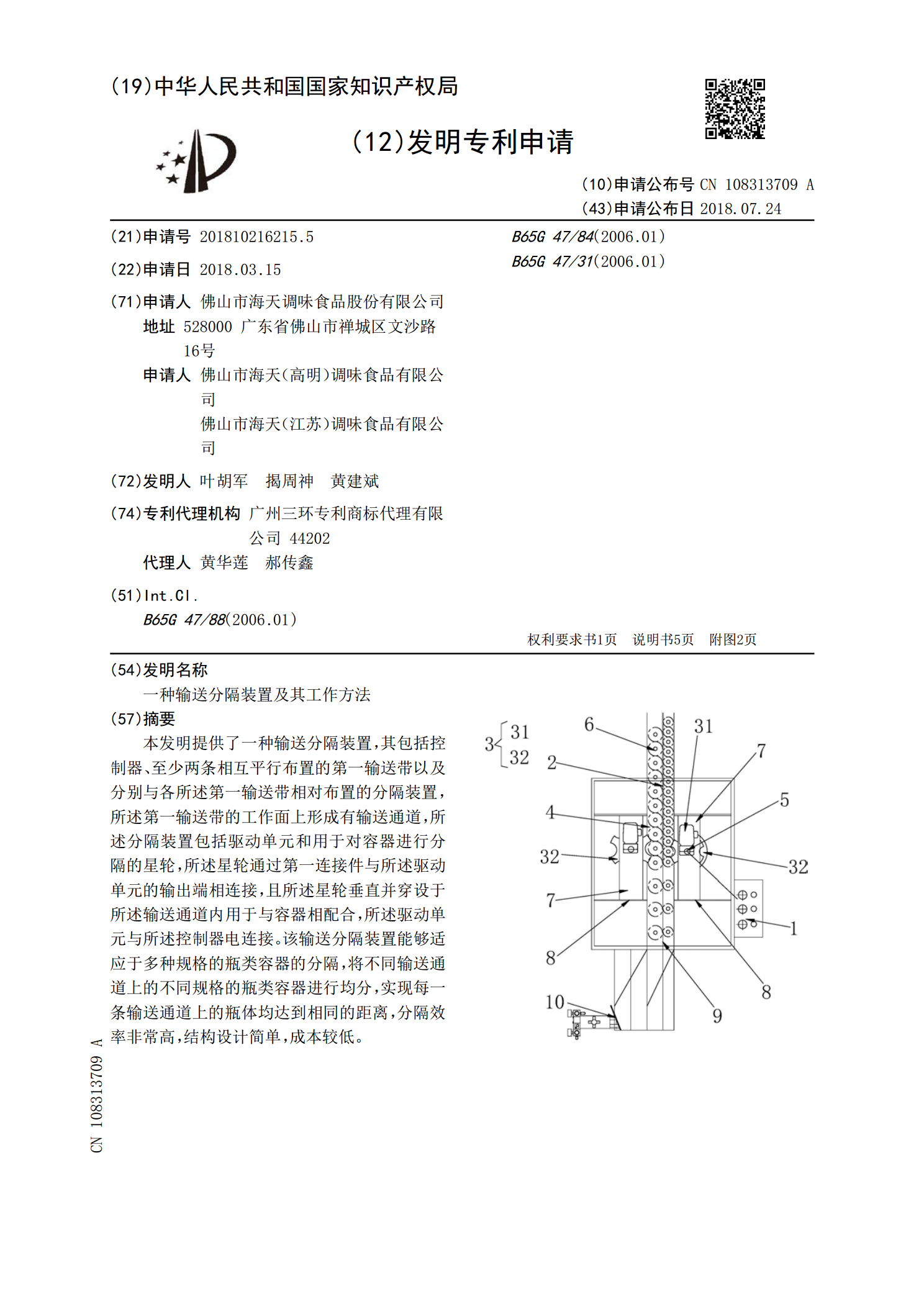
本发明提供了一种输送分隔装置,其包括控制器、至少两条相互平行布置的第一输送带以及分别与各所述第一输送带相对布置的分隔装置,所述第一输送带的工作面上形成有输送通道,所述分隔装置包括驱动单元和用于对容器进行分隔的星轮,所述星轮通过第一连接件与所述驱动单元的输出端相连接,且所述星轮垂直并穿设于所述输送通道内用于与容器相配合,所述驱动单元与所述控制器电连接。该输送分隔装置能够适应于多种规格的瓶类容器的分隔,将不同输送通道上的不同规格的瓶类容器进行均分,实现每一条输送通道上的瓶体均达到相同的距离,分隔效率非常高,结
一种直角转弯输送装置及其工作方法.pdf
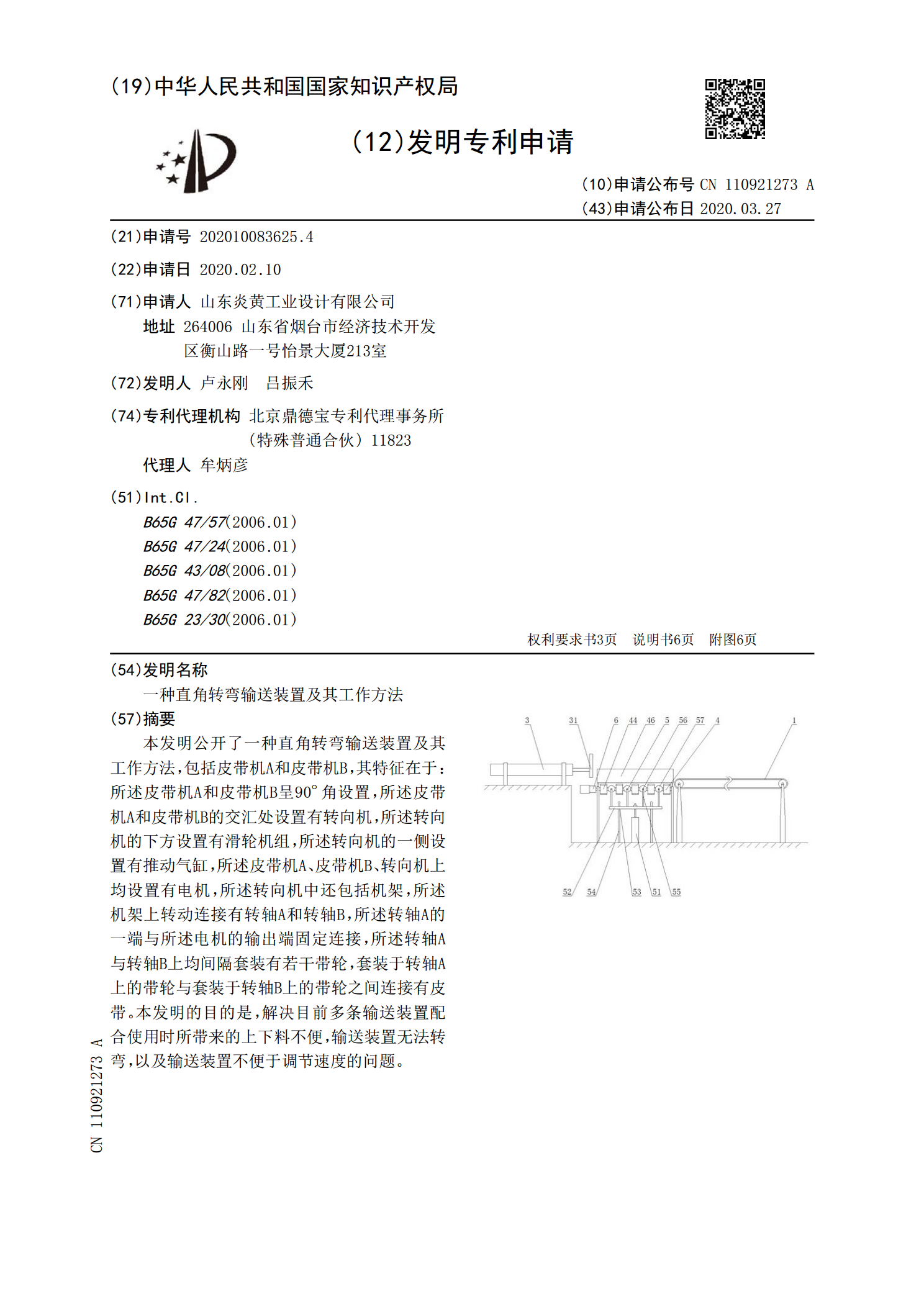
本发明公开了一种直角转弯输送装置及其工作方法,包括皮带机A和皮带机B,其特征在于:所述皮带机A和皮带机B呈90°角设置,所述皮带机A和皮带机B的交汇处设置有转向机,所述转向机的下方设置有滑轮机组,所述转向机的一侧设置有推动气缸,所述皮带机A、皮带机B、转向机上均设置有电机,所述转向机中还包括机架,所述机架上转动连接有转轴A和转轴B,所述转轴A的一端与所述电机的输出端固定连接,所述转轴A与转轴B上均间隔套装有若干带轮,套装于转轴A上的带轮与套装于转轴B上的带轮之间连接有皮带。本发明的目的是,解决目前多条输送
一种物料升降输送装置及其工作方法.pdf
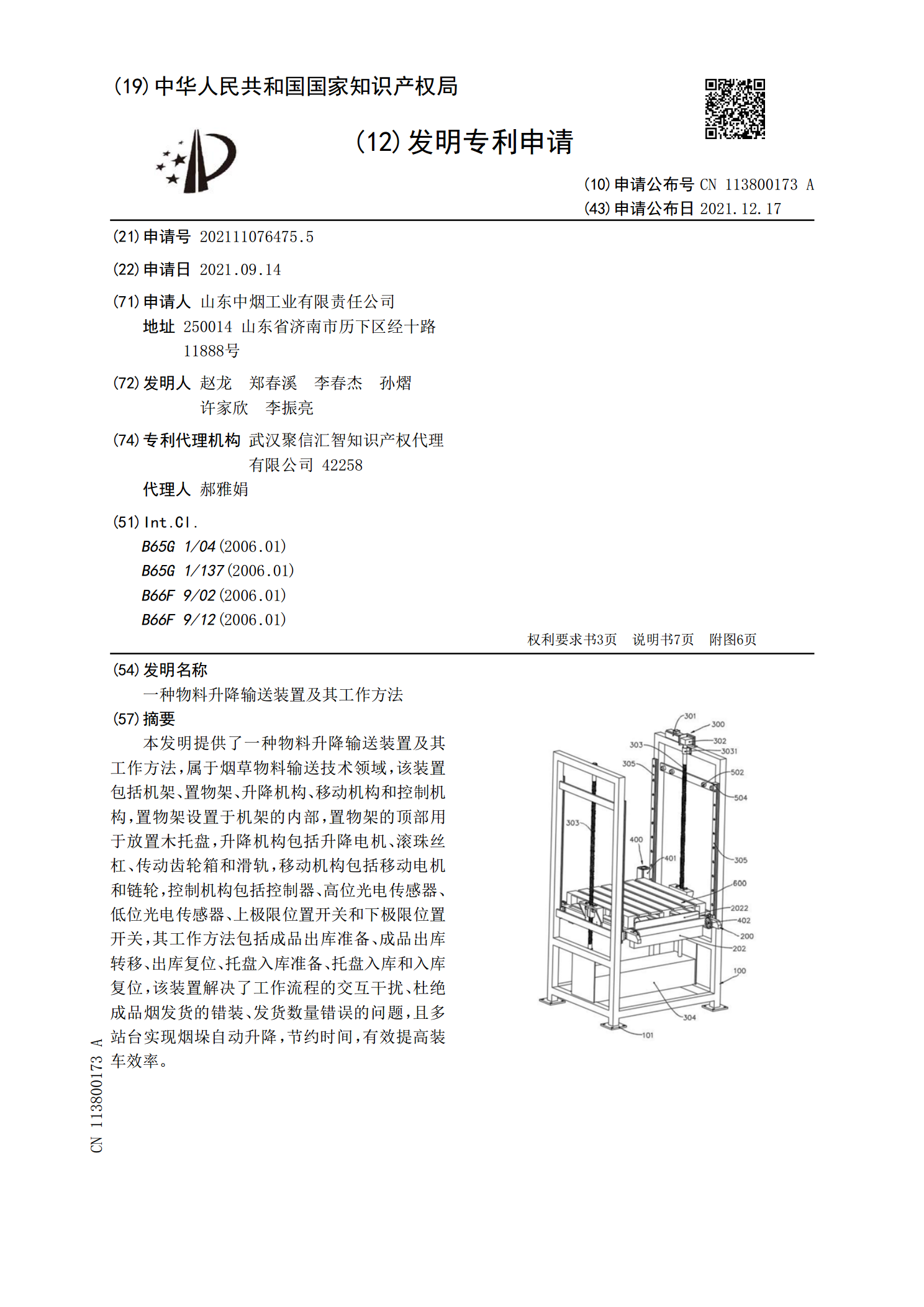
本发明提供了一种物料升降输送装置及其工作方法,属于烟草物料输送技术领域,该装置包括机架、置物架、升降机构、移动机构和控制机构,置物架设置于机架的内部,置物架的顶部用于放置木托盘,升降机构包括升降电机、滚珠丝杠、传动齿轮箱和滑轨,移动机构包括移动电机和链轮,控制机构包括控制器、高位光电传感器、低位光电传感器、上极限位置开关和下极限位置开关,其工作方法包括成品出库准备、成品出库转移、出库复位、托盘入库准备、托盘入库和入库复位,该装置解决了工作流程的交互干扰、杜绝成品烟发货的错装、发货数量错误的问题,且多站台实
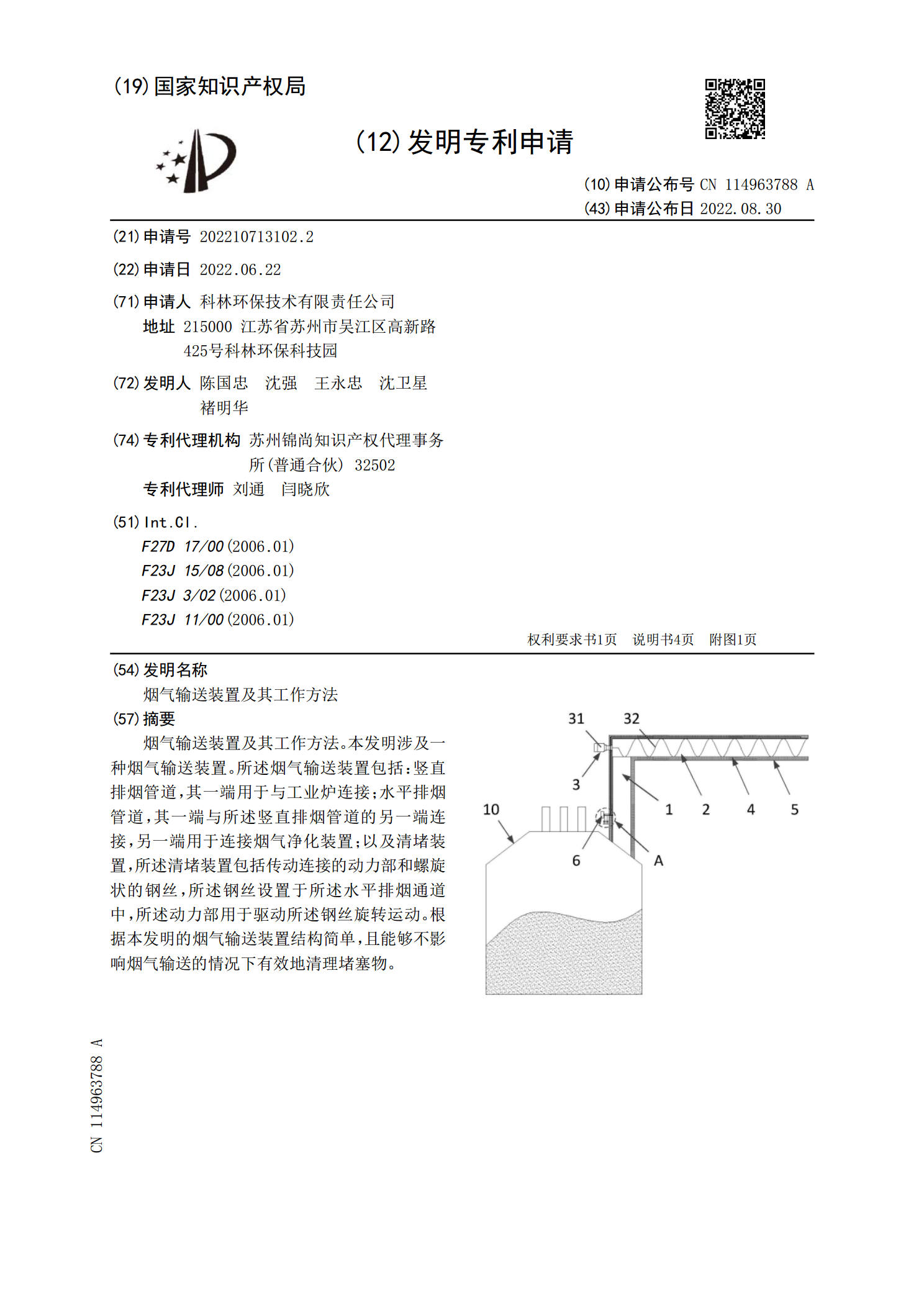
烟气输送装置及其工作方法.pdf
烟气输送装置及其工作方法。本发明涉及一种烟气输送装置。所述烟气输送装置包括:竖直排烟管道,其一端用于与工业炉连接;水平排烟管道,其一端与所述竖直排烟管道的另一端连接,另一端用于连接烟气净化装置;以及清堵装置,所述清堵装置包括传动连接的动力部和螺旋状的钢丝,所述钢丝设置于所述水平排烟通道中,所述动力部用于驱动所述钢丝旋转运动。根据本发明的烟气输送装置结构简单,且能够不影响烟气输送的情况下有效地清理堵塞物。