
自动驾驶车辆横纵向协调控制方法.pdf

一吃****成益

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动驾驶车辆横纵向协调控制方法.pdf
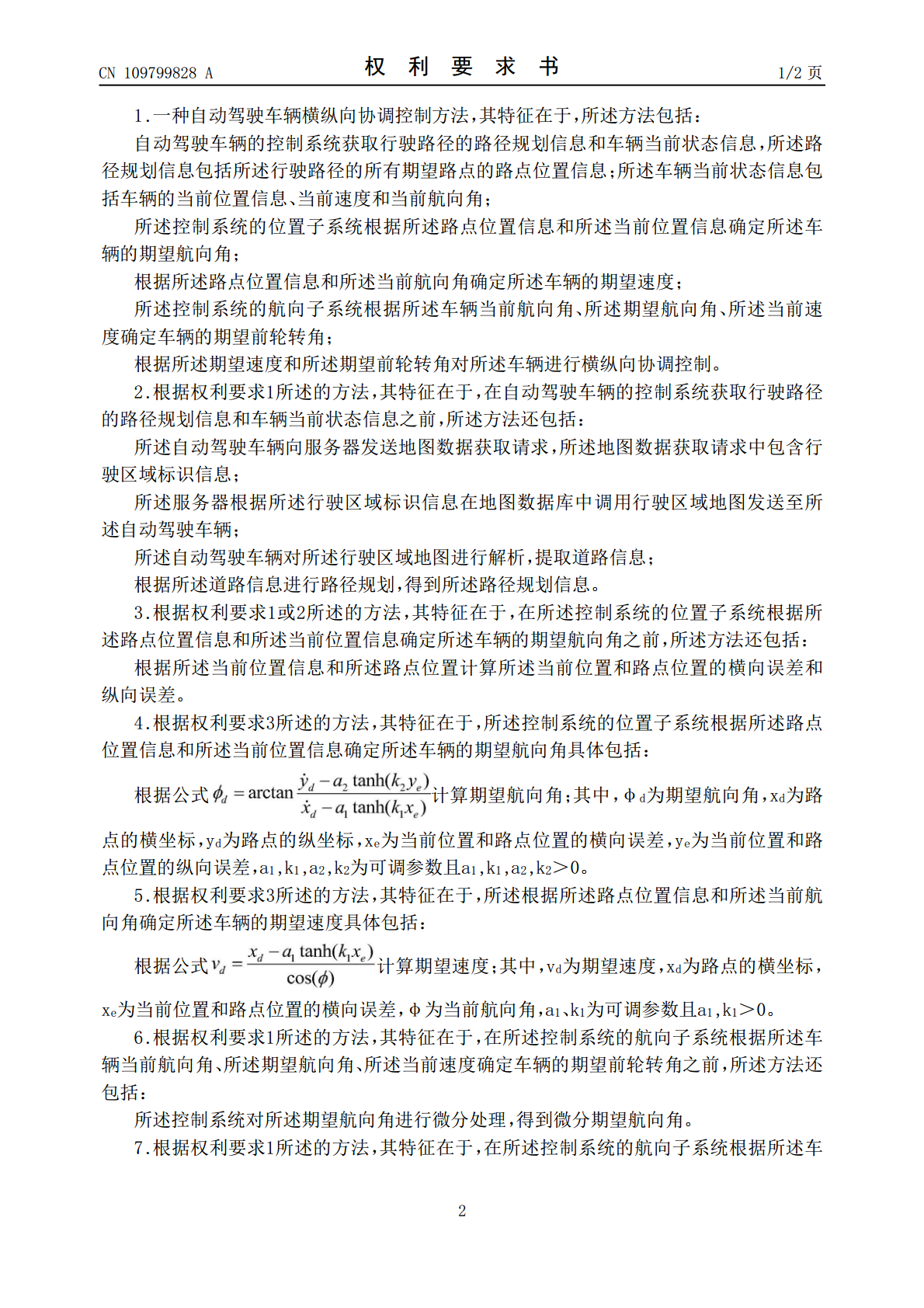
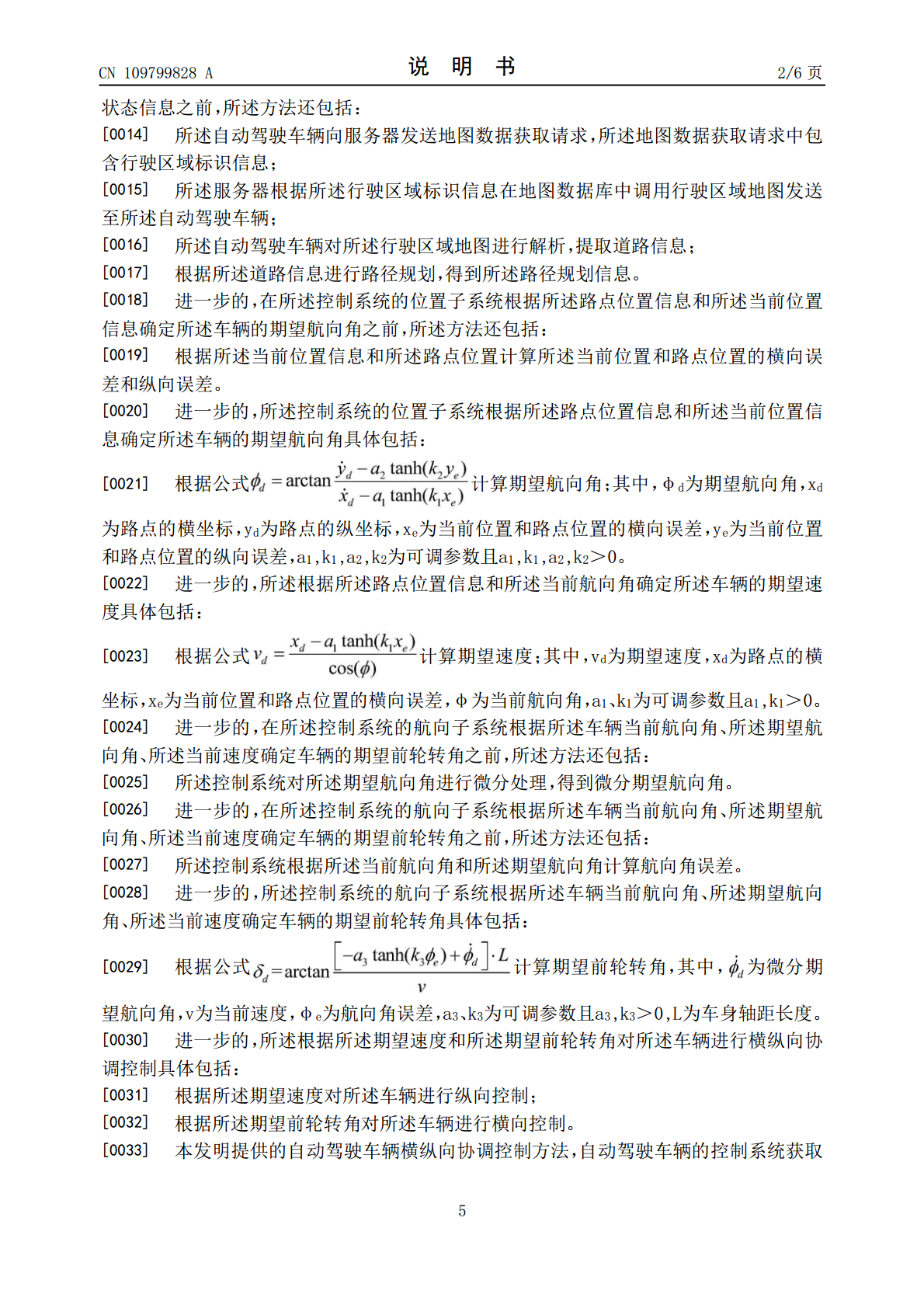
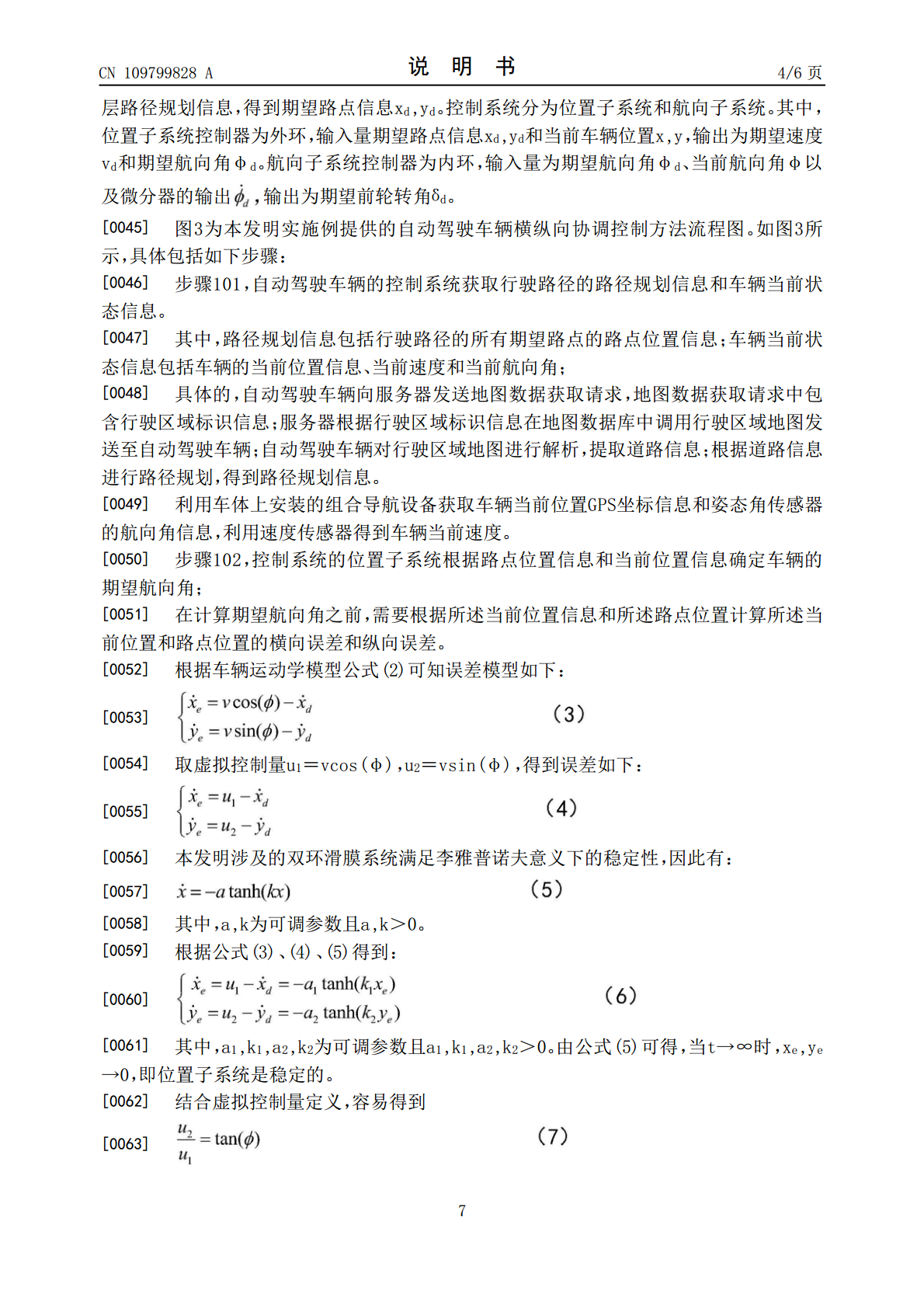
本发明涉及一种自动驾驶车辆横纵向协调控制方法,包括:自动驾驶车辆的控制系统获取行驶路径的路径规划信息和车辆当前状态信息,路径规划信息包括行驶路径的所有期望路点的路点位置信息;车辆当前状态信息包括车辆的当前位置信息、当前速度和当前航向角;控制系统的位置子系统根据路点位置信息和当前位置信息确定车辆的期望航向角;根据路点位置信息和当前航向角确定车辆的期望速度;控制系统的航向子系统根据车辆当前航向角、期望航向角、当前速度确定车辆的期望前轮转角;根据期望速度和期望前轮转角对车辆进行横纵向协调控制。本发明提供的自动驾

基于模型预测控制的自动驾驶车辆横纵向协调控制.pptx
添加副标题目录PART01PART02模型预测控制基本概念模型预测控制算法流程模型预测控制在自动驾驶中的应用模型预测控制的优点与挑战PART03横纵向协调控制的重要性横纵向协调控制策略设计横纵向协调控制算法实现横纵向协调控制性能评估PART04基于模型预测控制的横纵向协调控制方案控制方案的理论基础与技术路线控制方案的具体实现方法控制方案的有效性与可行性分析PART05实验场景与条件设置实验过程与数据采集实验结果分析结果对控制策略的优化与改进建议PART06研究结论总结研究局限性与未来工作展望感谢您的观看
一种无人车辆的横纵向协调控制轨迹跟随控制方法.pdf
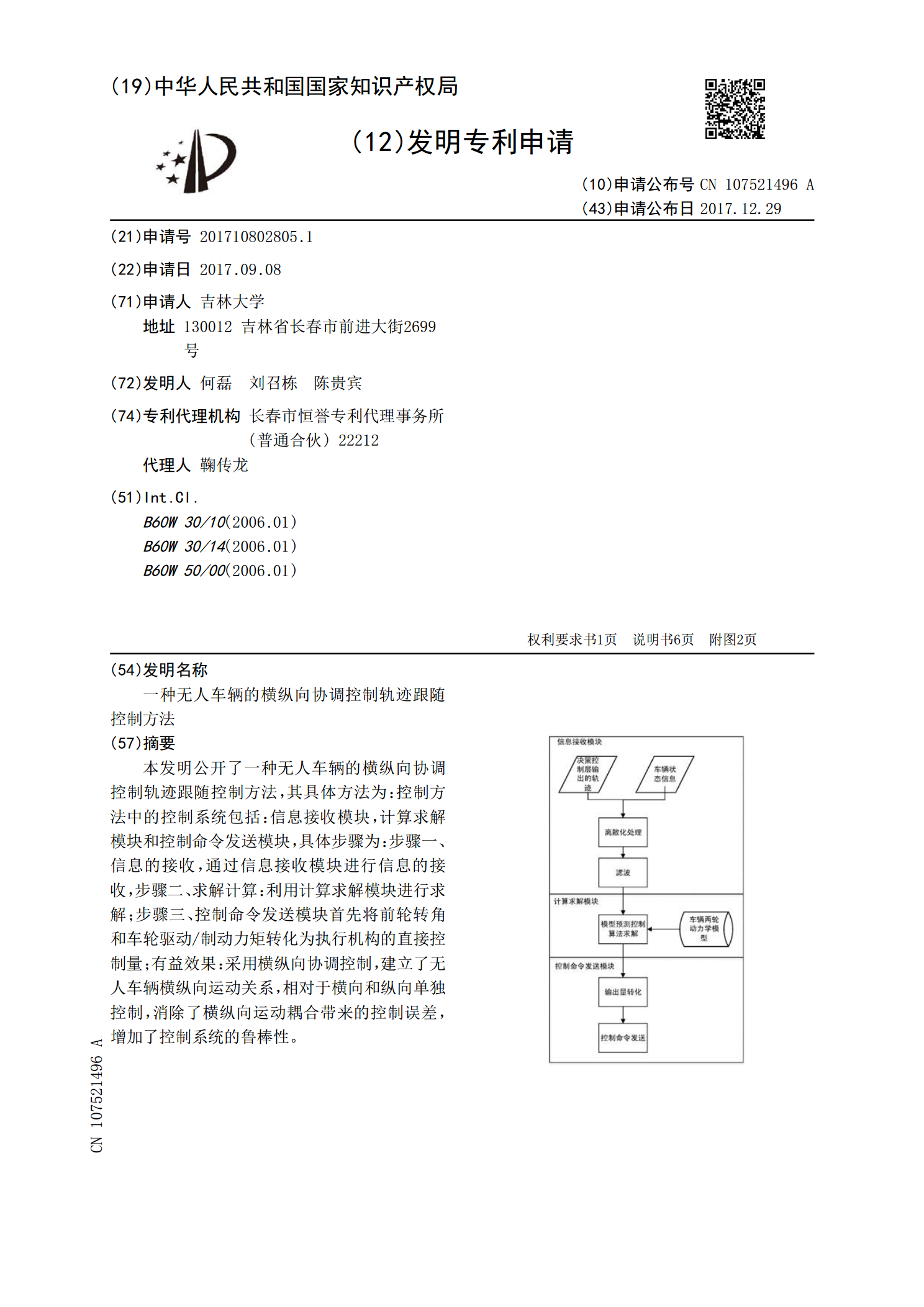
本发明公开了一种无人车辆的横纵向协调控制轨迹跟随控制方法,其具体方法为:控制方法中的控制系统包括:信息接收模块,计算求解模块和控制命令发送模块,具体步骤为:步骤一、信息的接收,通过信息接收模块进行信息的接收,步骤二、求解计算:利用计算求解模块进行求解;步骤三、控制命令发送模块首先将前轮转角和车轮驱动/制动力矩转化为执行机构的直接控制量;有益效果:采用横纵向协调控制,建立了无人车辆横纵向运动关系,相对于横向和纵向单独控制,消除了横纵向运动耦合带来的控制误差,增加了控制系统的鲁棒性。
一种智能车辆轨迹跟随的横纵向协调控制方法.pdf
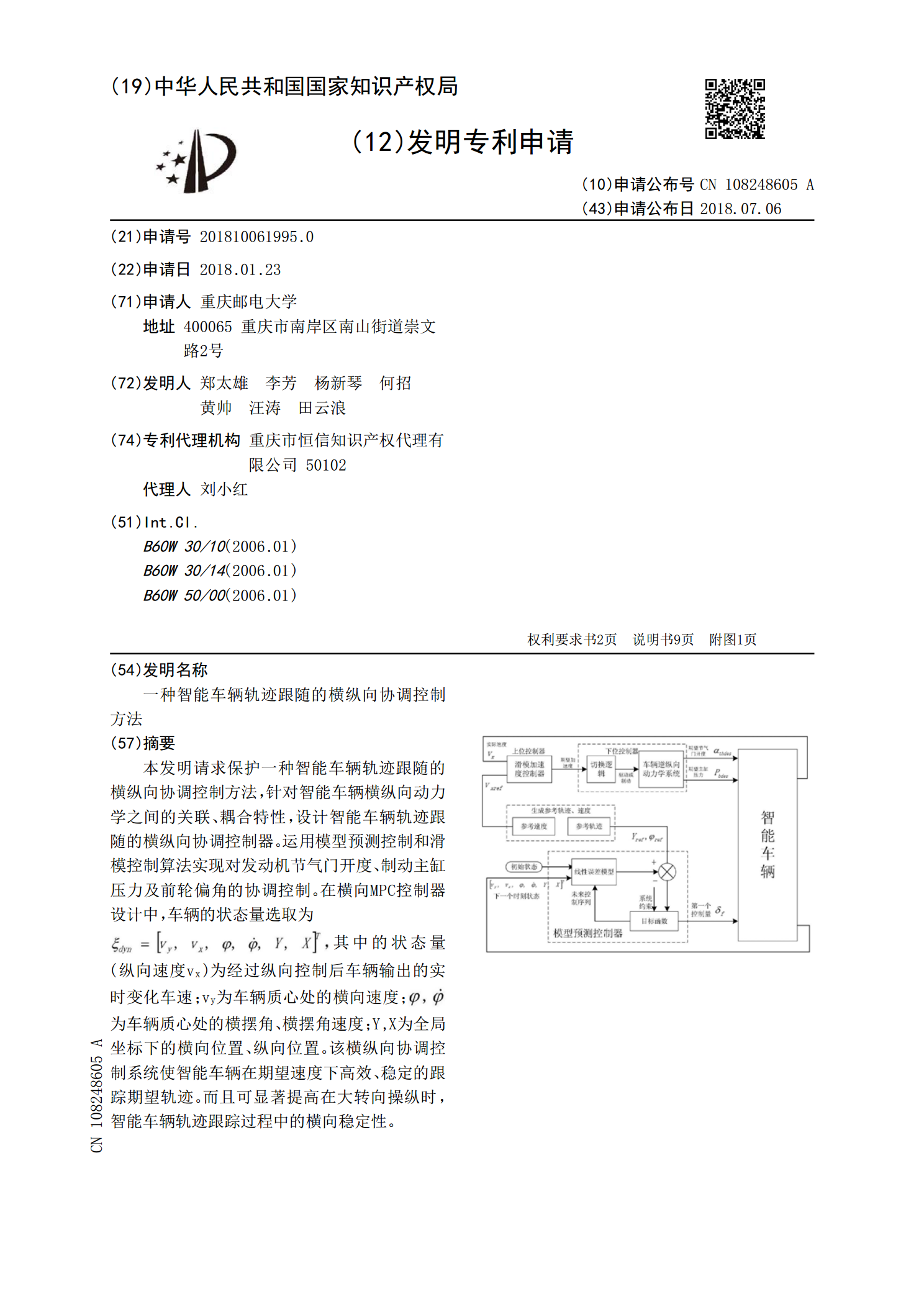
本发明请求保护一种智能车辆轨迹跟随的横纵向协调控制方法,针对智能车辆横纵向动力学之间的关联、耦合特性,设计智能车辆轨迹跟随的横纵向协调控制器。运用模型预测控制和滑模控制算法实现对发动机节气门开度、制动主缸压力及前轮偏角的协调控制。在横向MPC控制器设计中,车辆的状态量选取为
自动驾驶车辆的纵向控制方法、装置、设备及介质.pdf
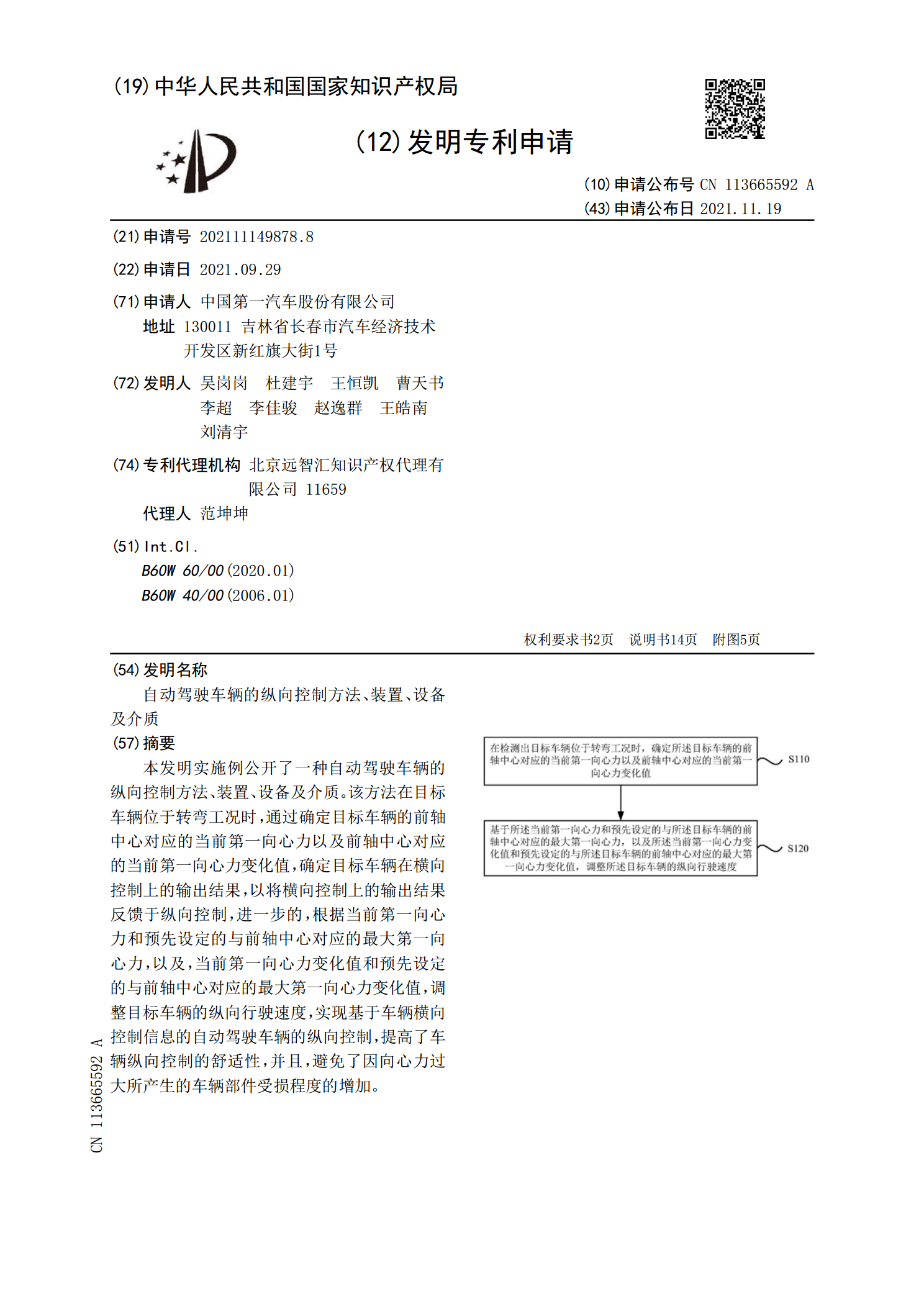
本发明实施例公开了一种自动驾驶车辆的纵向控制方法、装置、设备及介质。该方法在目标车辆位于转弯工况时,通过确定目标车辆的前轴中心对应的当前第一向心力以及前轴中心对应的当前第一向心力变化值,确定目标车辆在横向控制上的输出结果,以将横向控制上的输出结果反馈于纵向控制,进一步的,根据当前第一向心力和预先设定的与前轴中心对应的最大第一向心力,以及,当前第一向心力变化值和预先设定的与前轴中心对应的最大第一向心力变化值,调整目标车辆的纵向行驶速度,实现基于车辆横向控制信息的自动驾驶车辆的纵向控制,提高了车辆纵向控制的舒