
一种多工位全自动圆盘机器人焊接设备.pdf

俊凤****bb

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多工位全自动圆盘机器人焊接设备.pdf
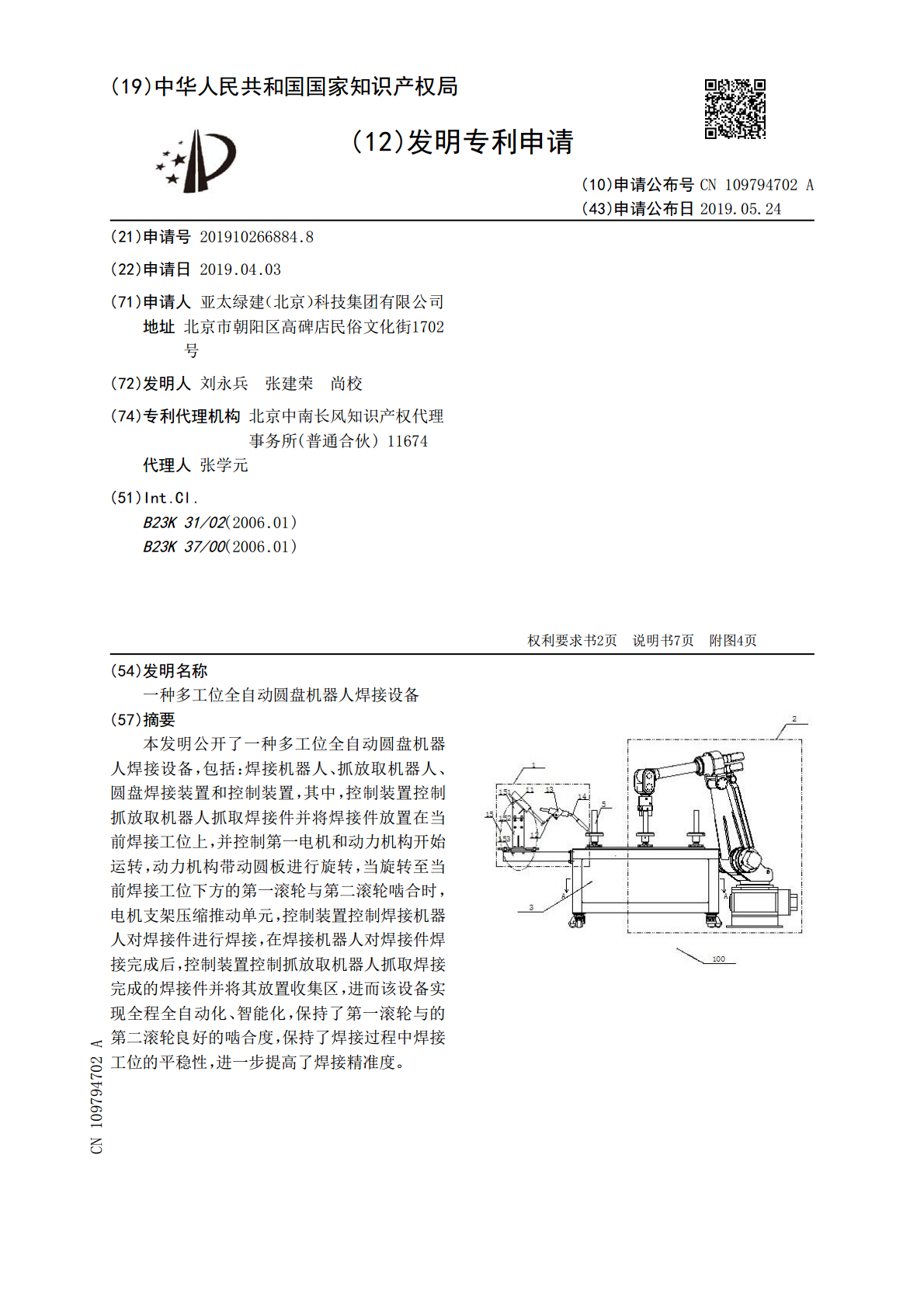
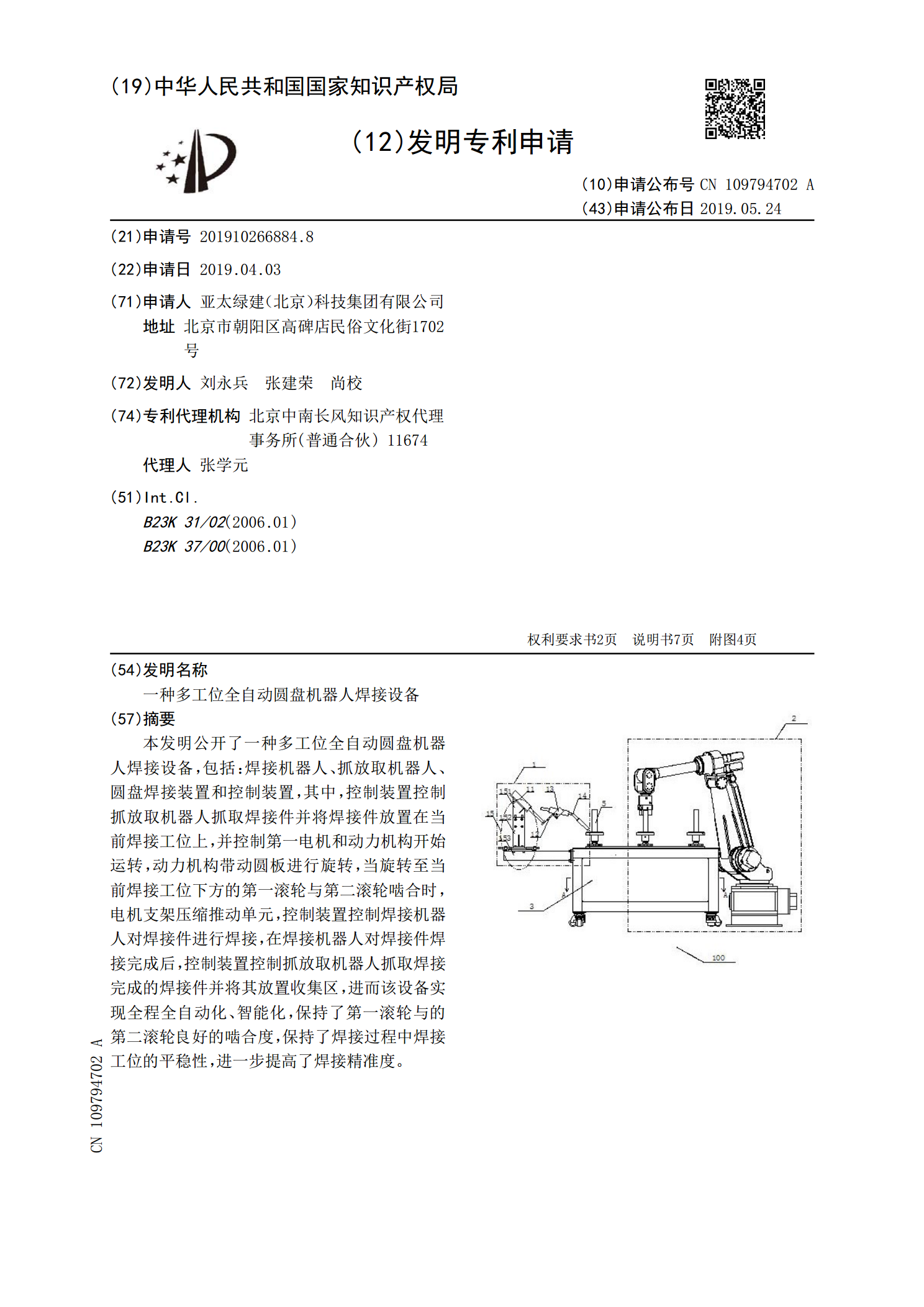
本发明公开了一种多工位全自动圆盘机器人焊接设备,包括:焊接机器人、抓放取机器人、圆盘焊接装置和控制装置,其中,控制装置控制抓放取机器人抓取焊接件并将焊接件放置在当前焊接工位上,并控制第一电机和动力机构开始运转,动力机构带动圆板进行旋转,当旋转至当前焊接工位下方的第一滚轮与第二滚轮啮合时,电机支架压缩推动单元,控制装置控制焊接机器人对焊接件进行焊接,在焊接机器人对焊接件焊接完成后,控制装置控制抓放取机器人抓取焊接完成的焊接件并将其放置收集区,进而该设备实现全程全自动化、智能化,保持了第一滚轮与的第二滚轮良好
一种风机叶轮加工的多工位全自动焊接设备.pdf
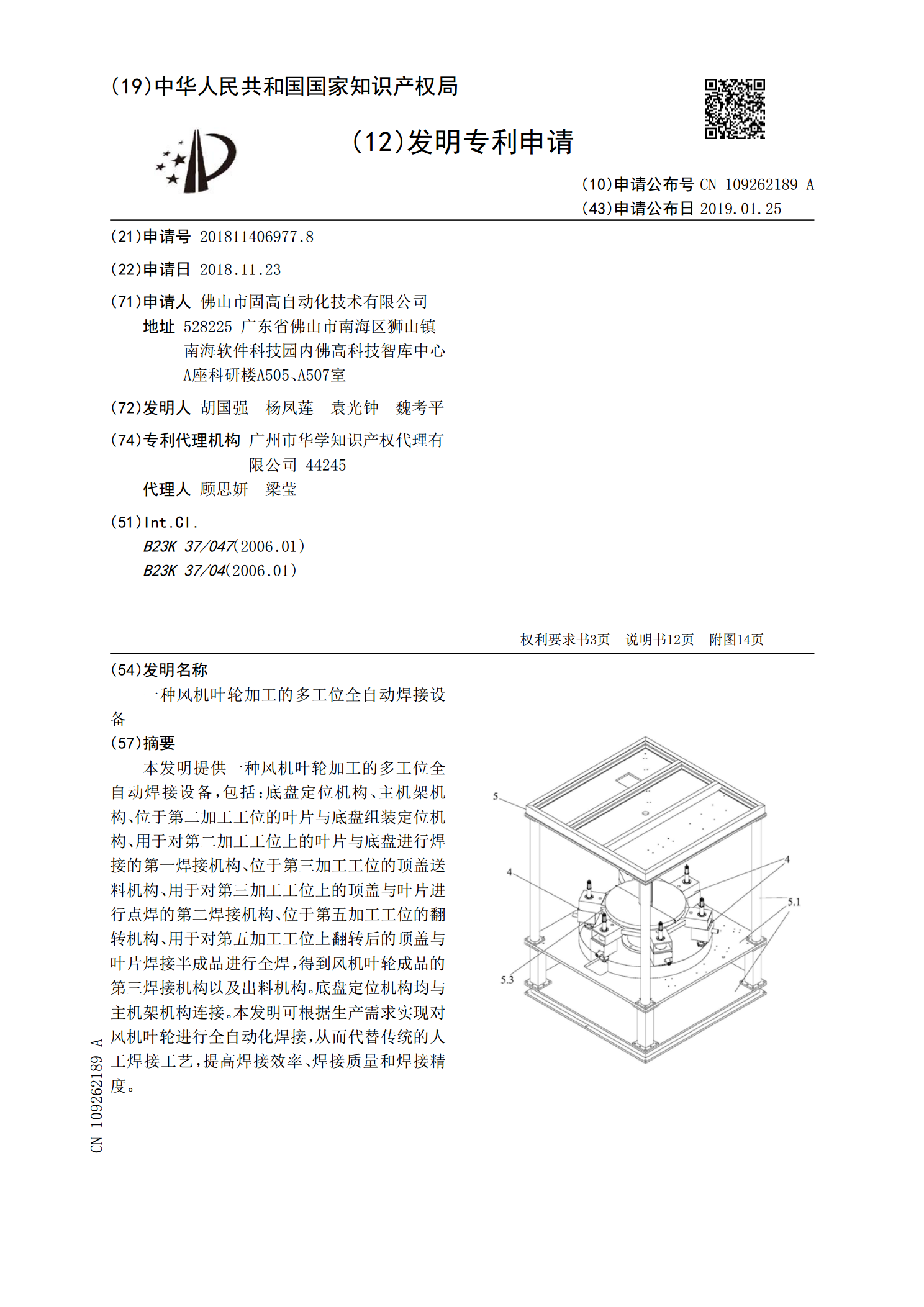
本发明提供一种风机叶轮加工的多工位全自动焊接设备,包括:底盘定位机构、主机架机构、位于第二加工工位的叶片与底盘组装定位机构、用于对第二加工工位上的叶片与底盘进行焊接的第一焊接机构、位于第三加工工位的顶盖送料机构、用于对第三加工工位上的顶盖与叶片进行点焊的第二焊接机构、位于第五加工工位的翻转机构、用于对第五加工工位上翻转后的顶盖与叶片焊接半成品进行全焊,得到风机叶轮成品的第三焊接机构以及出料机构。底盘定位机构均与主机架机构连接。本发明可根据生产需求实现对风机叶轮进行全自动化焊接,从而代替传统的人工焊接工艺,
一种多工位自动焊接设备.pdf
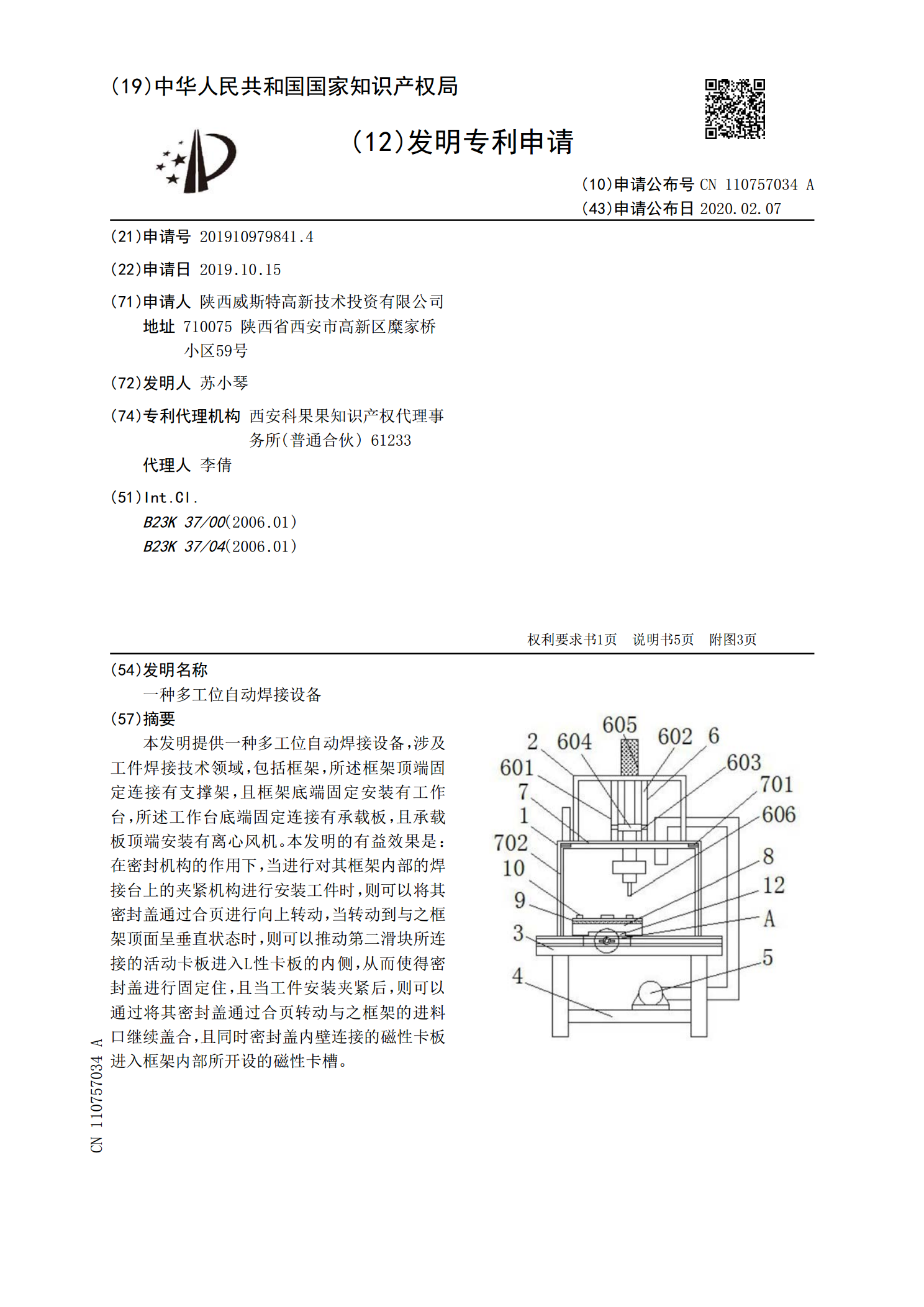
本发明提供一种多工位自动焊接设备,涉及工件焊接技术领域,包括框架,所述框架顶端固定连接有支撑架,且框架底端固定安装有工作台,所述工作台底端固定连接有承载板,且承载板顶端安装有离心风机。本发明的有益效果是:在密封机构的作用下,当进行对其框架内部的焊接台上的夹紧机构进行安装工件时,则可以将其密封盖通过合页进行向上转动,当转动到与之框架顶面呈垂直状态时,则可以推动第二滑块所连接的活动卡板进入L性卡板的内侧,从而使得密封盖进行固定住,且当工件安装夹紧后,则可以通过将其密封盖通过合页转动与之框架的进料口继续盖合,且
一种全自动多工位变位焊接机器人.pdf
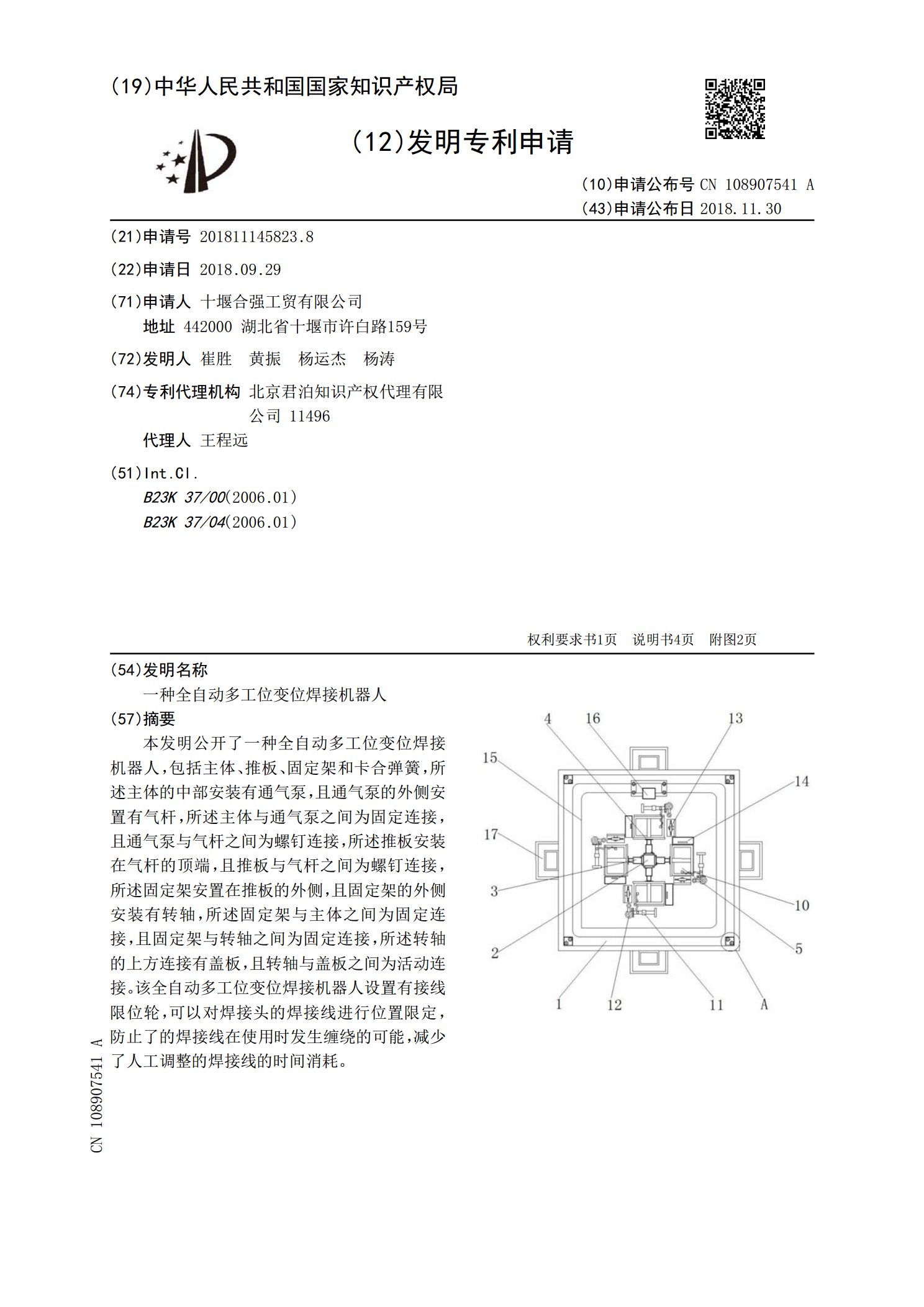
本发明公开了一种全自动多工位变位焊接机器人,包括主体、推板、固定架和卡合弹簧,所述主体的中部安装有通气泵,且通气泵的外侧安置有气杆,所述主体与通气泵之间为固定连接,且通气泵与气杆之间为螺钉连接,所述推板安装在气杆的顶端,且推板与气杆之间为螺钉连接,所述固定架安置在推板的外侧,且固定架的外侧安装有转轴,所述固定架与主体之间为固定连接,且固定架与转轴之间为固定连接,所述转轴的上方连接有盖板,且转轴与盖板之间为活动连接。该全自动多工位变位焊接机器人设置有接线限位轮,可以对焊接头的焊接线进行位置限定,防止了的焊接
一种多工位全自动封边机.pdf
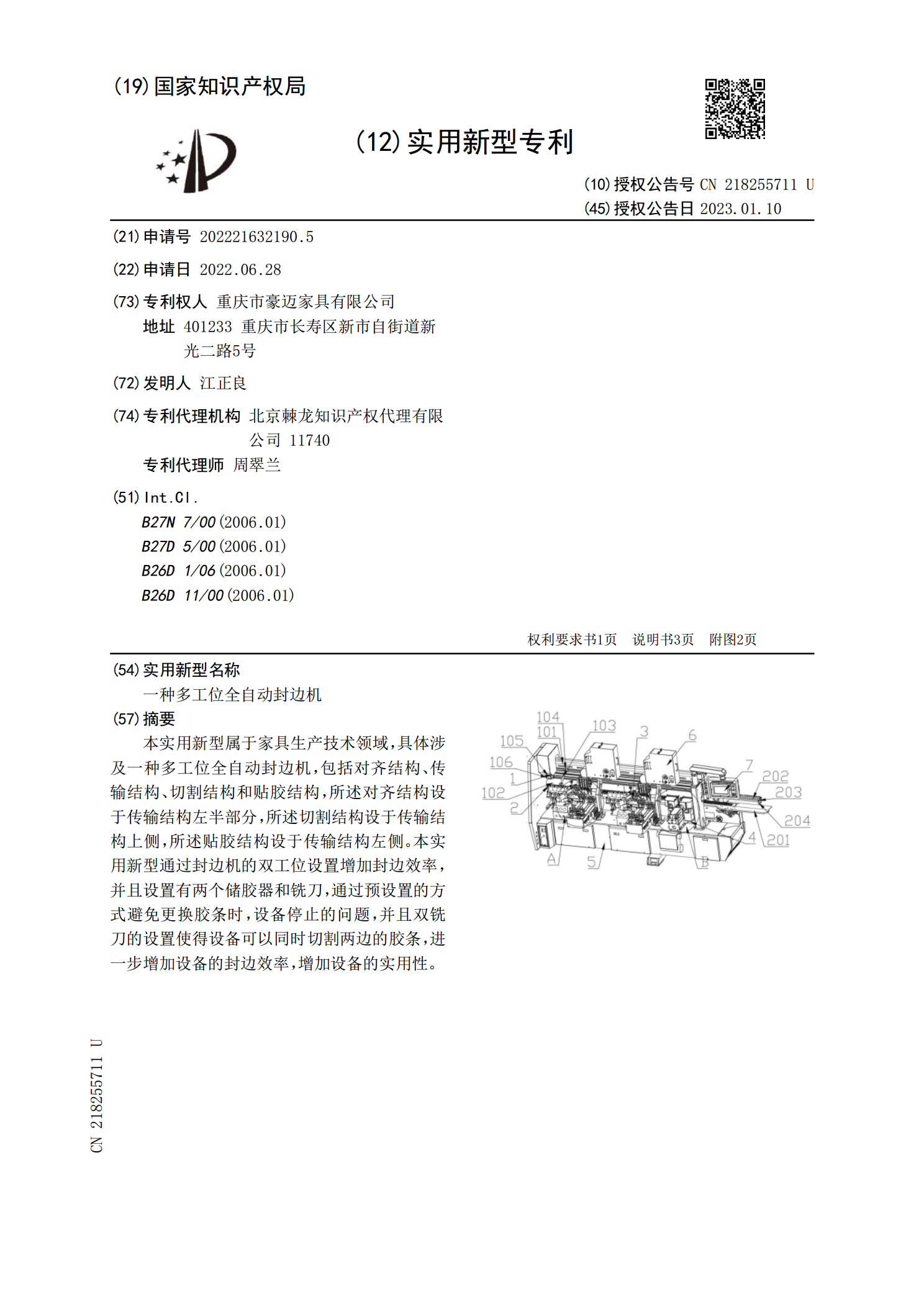
本实用新型属于家具生产技术领域,具体涉及一种多工位全自动封边机,包括对齐结构、传输结构、切割结构和贴胶结构,所述对齐结构设于传输结构左半部分,所述切割结构设于传输结构上侧,所述贴胶结构设于传输结构左侧。本实用新型通过封边机的双工位设置增加封边效率,并且设置有两个储胶器和铣刀,通过预设置的方式避免更换胶条时,设备停止的问题,并且双铣刀的设置使得设备可以同时切割两边的胶条,进一步增加设备的封边效率,增加设备的实用性。