
一种具备冗余功能的线控转向装置及控制方法.pdf

秀美****甜v


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具备冗余功能的线控转向装置及控制方法.pdf
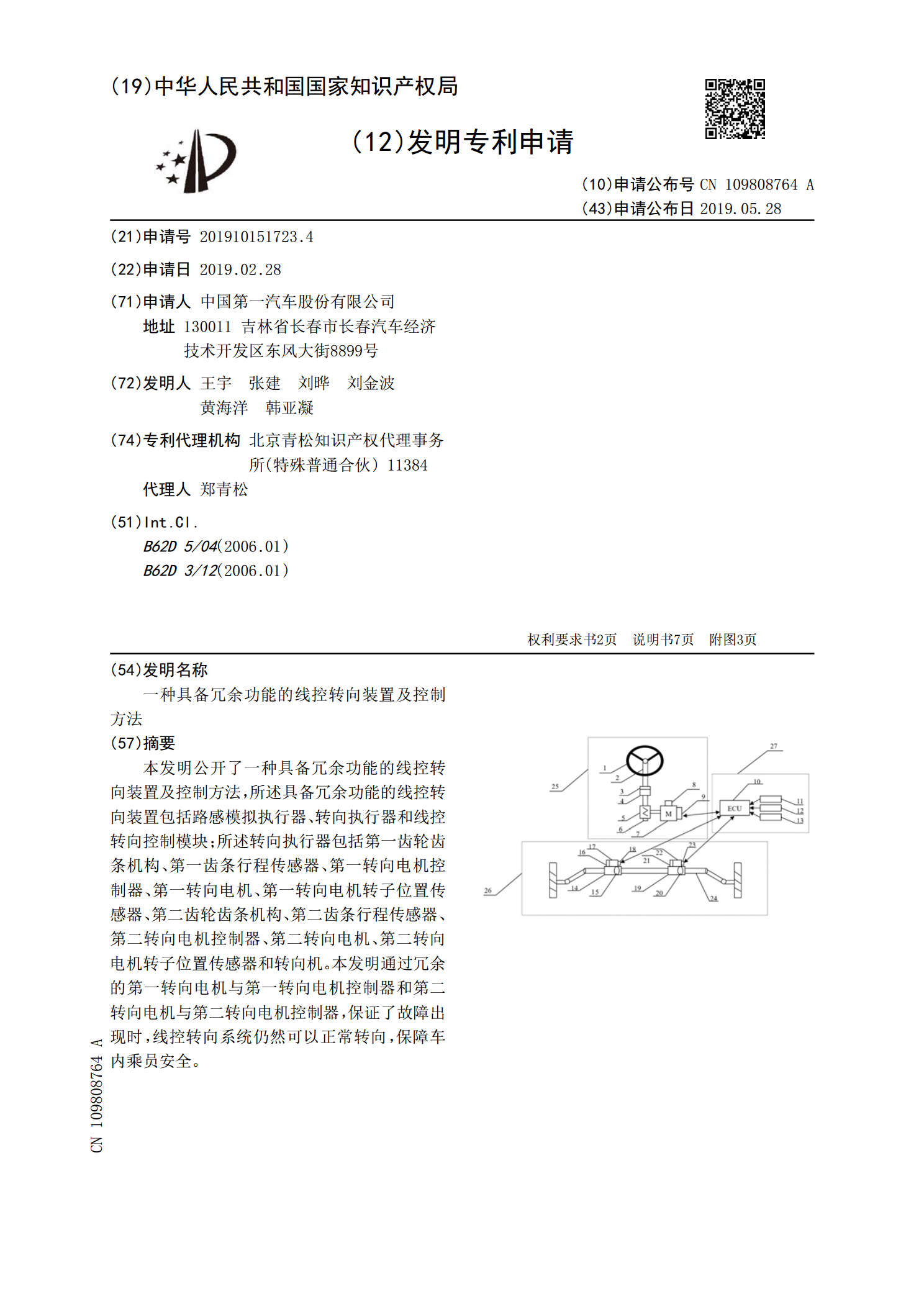
本发明公开了一种具备冗余功能的线控转向装置及控制方法,所述具备冗余功能的线控转向装置包括路感模拟执行器、转向执行器和线控转向控制模块;所述转向执行器包括第一齿轮齿条机构、第一齿条行程传感器、第一转向电机控制器、第一转向电机、第一转向电机转子位置传感器、第二齿轮齿条机构、第二齿条行程传感器、第二转向电机控制器、第二转向电机、第二转向电机转子位置传感器和转向机。本发明通过冗余的第一转向电机与第一转向电机控制器和第二转向电机与第二转向电机控制器,保证了故障出现时,线控转向系统仍然可以正常转向,保障车内乘员安全。

一种线控转向系统的多电机冗余装置及控制方法.pdf
本发明公开了一种线控转向系统的多电机冗余装置及其控制方法,该装置增加了冗余电机,同时在线控转向系统的输入轴和输出轴之间的离合器设有一与冗余电机联动的中间轴及中间轴齿轮结构,在离合器内形成输入轴和中间轴、输出轴和中间轴的双离合结构,在路感电机、转向电机或其电机控制单元、控制线路出现异常时,可在电子控制单元的控制下,实现中间轴与输入轴的联动、中间轴与输出轴的联动、或中间轴、输入轴、输出轴三者的联动,从而最大限度的保证线控转向系统的安全性和可用性,并当线性转向系统完全失效时,仍能切换到机械式转向系统,保证车辆的

一种双电机冗余线控转向装置及其控制方法.pdf
本发明公开了一种双电机冗余线控转向装置及其控制方法,包括电控单元ECU、扭矩传感器、电机、转向器齿条、转向器小齿轮、线控转向机构。该装置的电控单元ECU通过采集方向盘转角信号,判断驾驶员转向意图,当线控转向机构正常工作时,电磁离合器断开,电机起到提供路感的作用,滚柱丝杠转向机构完成转向指令;当线控转向机构故障时,电磁离合器合上,电机反转,转向器小齿轮和转向器齿条完成转向指令,起到提供转向助力的作用。本发明结构简洁,精确度高,工作可靠,滚柱丝杠转向机构能精确控制转向位移,同时该装置还可在线控转向机构失效时自

一种具有冗余机构的车用线控转向装置及控制方法.pdf
本发明公开了一种具有冗余机构的车用线控转向装置及其控制方法,该车用线控转向装置包括:转向操纵机构,转向执行机构,第一离合装置,第一离合装置设置在所述转向盘管柱后端,用于将转向操作机构与转向执行机构连接或断开;控制器,所述控制器控制转向操纵机构,转向执行机构。转向执行机构包括主电机、与所述主电机连接的齿条助力转向传动机构,辅电机、与所述辅电机连接的小齿轮电动助力传动机构,本发明通过转向执行机构与转向操纵机构的机械断开,以及转向执行机构的冗余设计来提高高等级自动驾驶用转向系统的可靠性,实现线控转向系统的高安全

一种线控冗余转向系统.pdf
本发明提供一种线控冗余转向系统,包括互为冗余的第一电机(18)和第二电机(21)、行星排(17)、与所述行星排(17)联接的转向器;所述第一电机(18)与所述行星排(17)的太阳轮联接,所述第二电机(21)通过传动机构与所述行星排(17)的齿圈联接,所述行星排(17)的行星架与所述转向器联接。本发明采用行星排(17)来配合电机冗余的设计,具有高可靠性的特点,有效提高车辆转向时的安全性。