
一种主被动混合控制型液压四连杆假肢膝关节.pdf

琰琬****买买

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种主被动混合控制型液压四连杆假肢膝关节.pdf
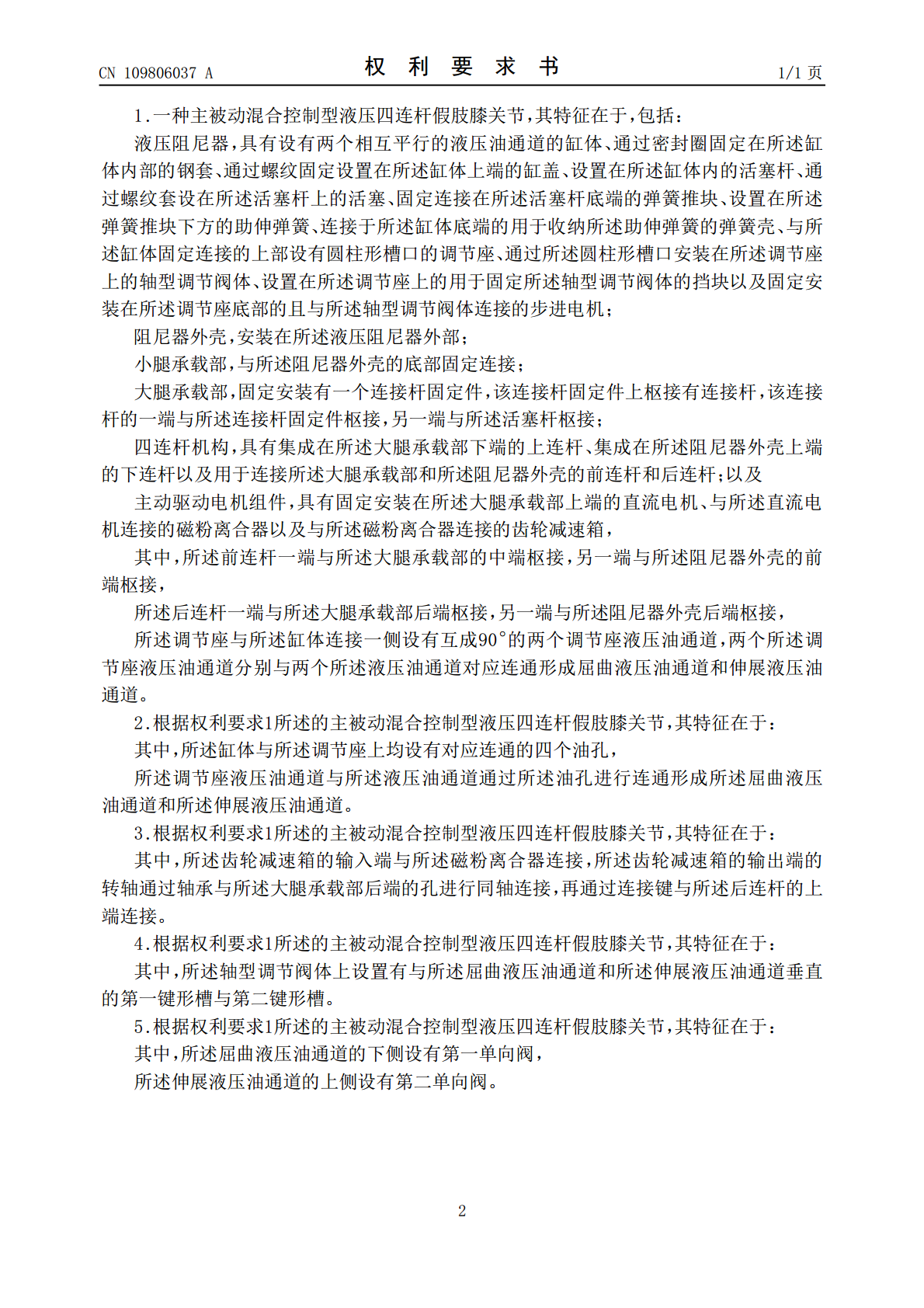
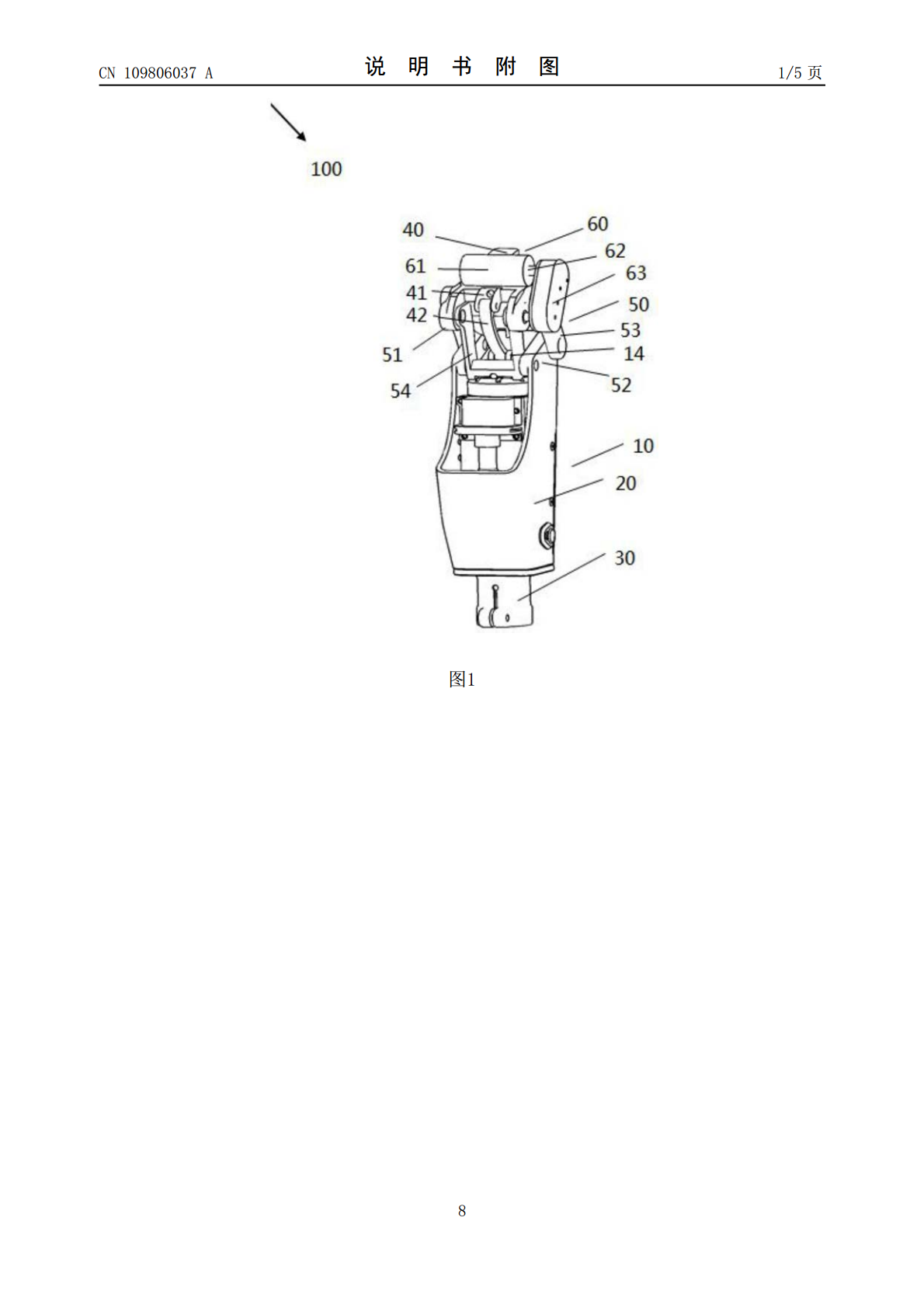
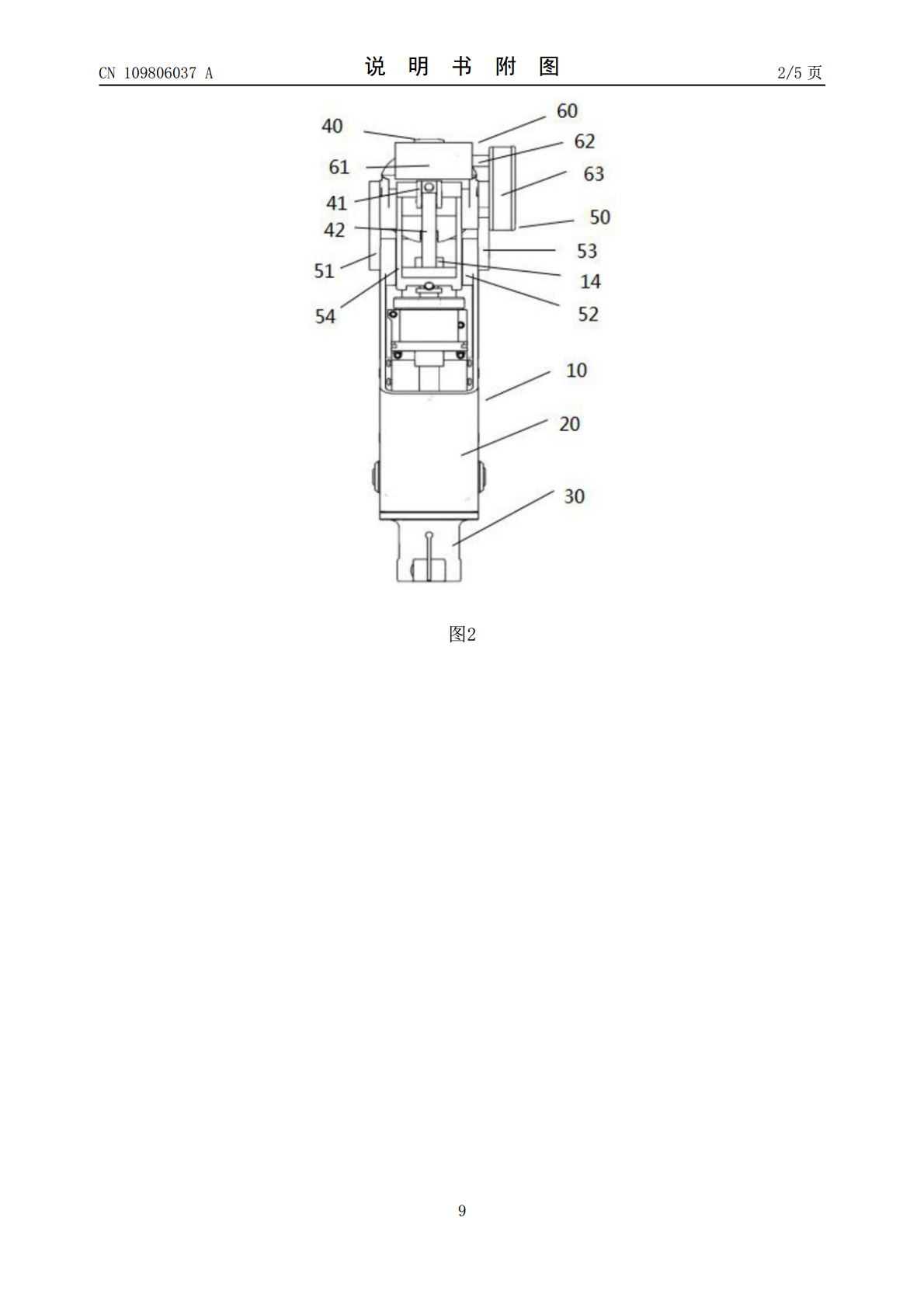
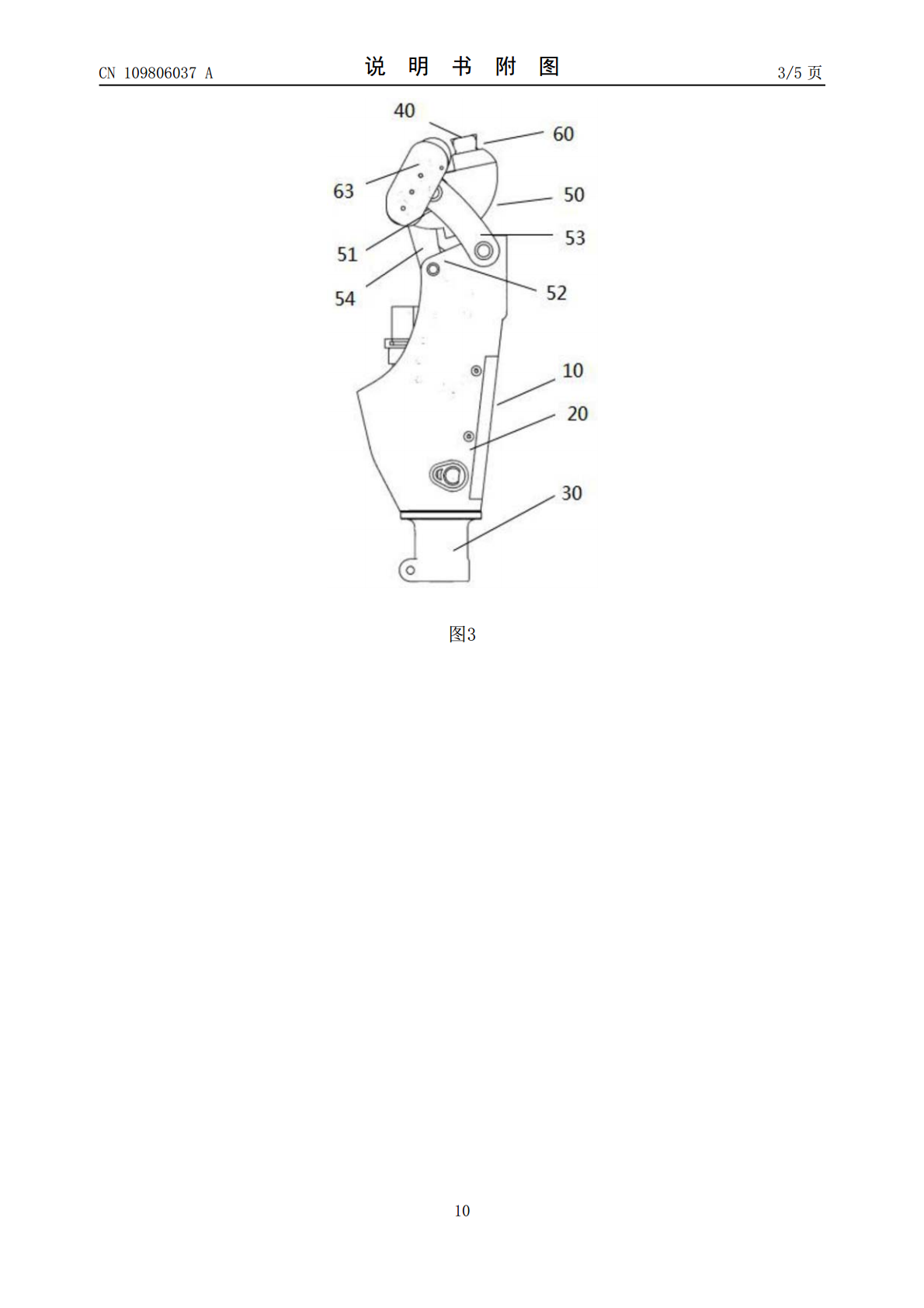
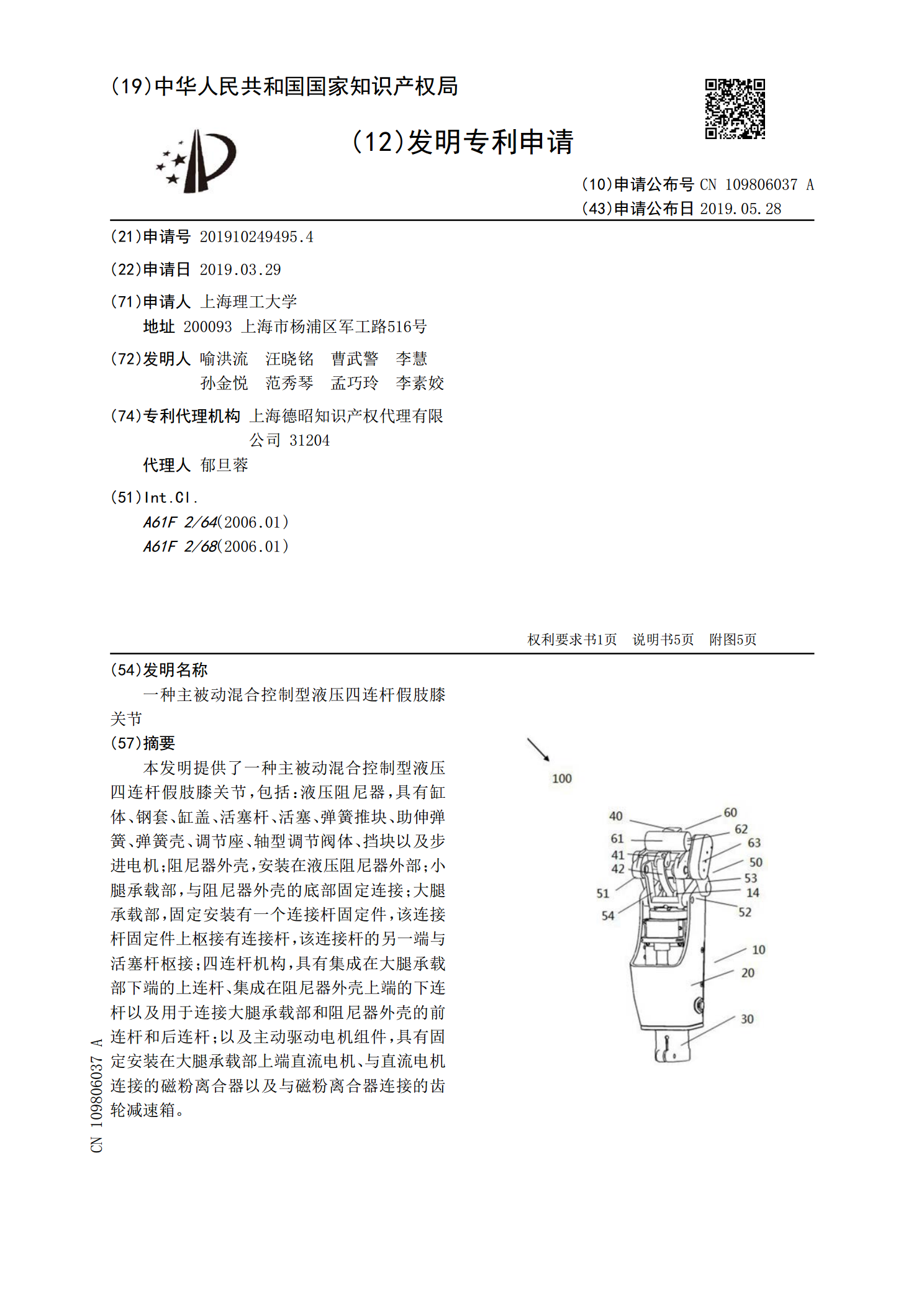
本发明提供了一种主被动混合控制型液压四连杆假肢膝关节,包括:液压阻尼器,具有缸体、钢套、缸盖、活塞杆、活塞、弹簧推块、助伸弹簧、弹簧壳、调节座、轴型调节阀体、挡块以及步进电机;阻尼器外壳,安装在液压阻尼器外部;小腿承载部,与阻尼器外壳的底部固定连接;大腿承载部,固定安装有一个连接杆固定件,该连接杆固定件上枢接有连接杆,该连接杆的另一端与活塞杆枢接;四连杆机构,具有集成在大腿承载部下端的上连杆、集成在阻尼器外壳上端的下连杆以及用于连接大腿承载部和阻尼器外壳的前连杆和后连杆;以及主动驱动电机组件,具有固定安装
一种主被动混合式假肢膝关节.pdf
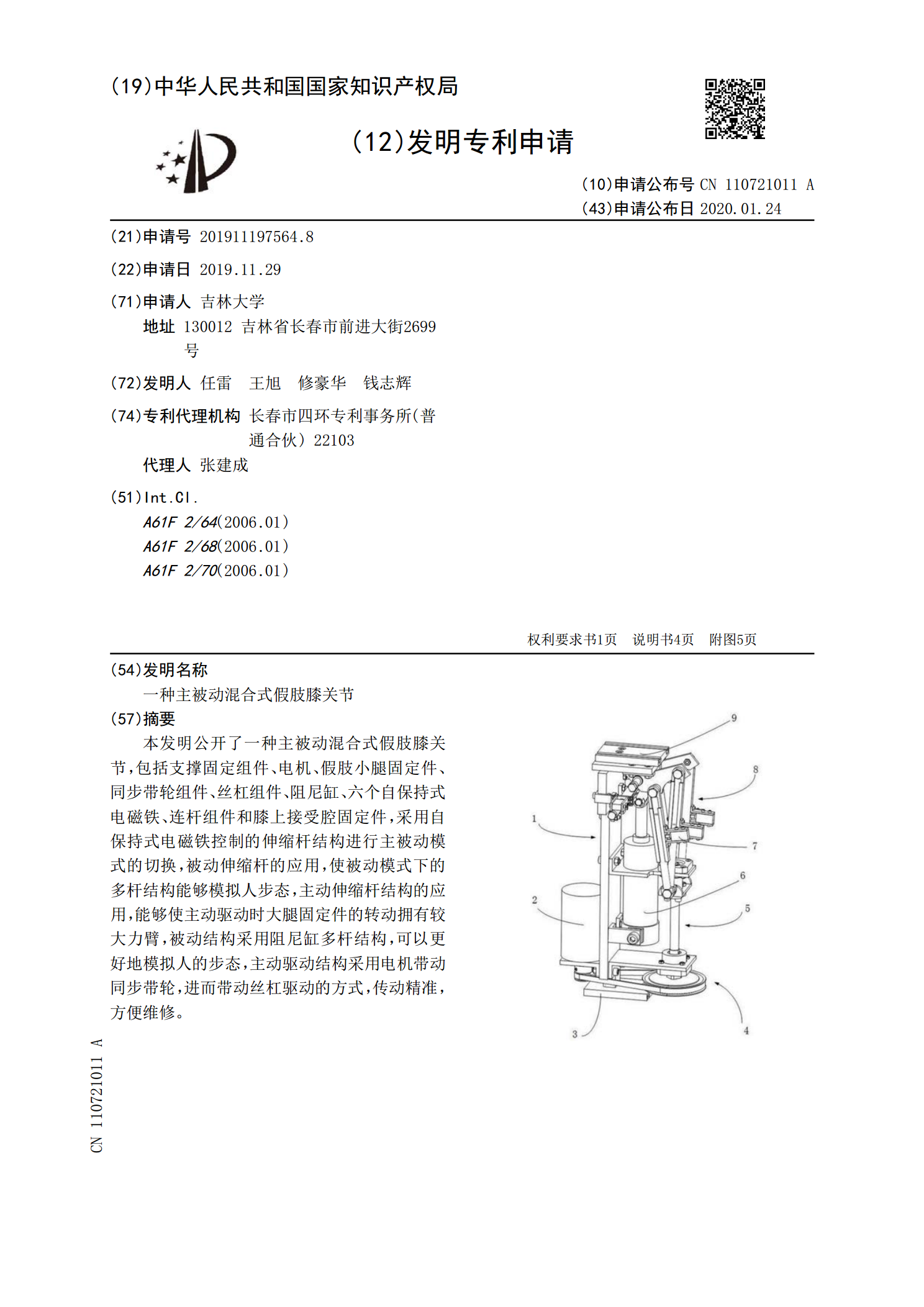
本发明公开了一种主被动混合式假肢膝关节,包括支撑固定组件、电机、假肢小腿固定件、同步带轮组件、丝杠组件、阻尼缸、六个自保持式电磁铁、连杆组件和膝上接受腔固定件,采用自保持式电磁铁控制的伸缩杆结构进行主被动模式的切换,被动伸缩杆的应用,使被动模式下的多杆结构能够模拟人步态,主动伸缩杆结构的应用,能够使主动驱动时大腿固定件的转动拥有较大力臂,被动结构采用阻尼缸多杆结构,可以更好地模拟人的步态,主动驱动结构采用电机带动同步带轮,进而带动丝杠驱动的方式,传动精准,方便维修。

主被动假肢膝关节.pdf
本发明提出了一种主被动假肢膝关节机构,它由主动驱动机构、被动约束机构、膝关节轴、超越离合器等组成。主动驱动机构由直流伺服电机、减速器、齿轮组成。被动约束机构由直流伺服电机、锥齿轮轴构成。膝关节轴安装在由左侧板、右侧板、顶板构成的U形块上。膝关节轴上带有锥齿轮,一个单向超越离合器的星轮和该轴通过键连接固连,该离合器的外环和一个圆柱齿轮通过键固连。主动驱动机构和被动约束机构通过这两个圆柱齿轮的啮合建立关系,相当于一个驱动离合器的星轮,另一个驱动离合器的外环。假肢穿戴者在行走过程中,在假肢控制系统的控制与协调下
一种主被动混合驱动的髋膝一体化智能假肢.pdf
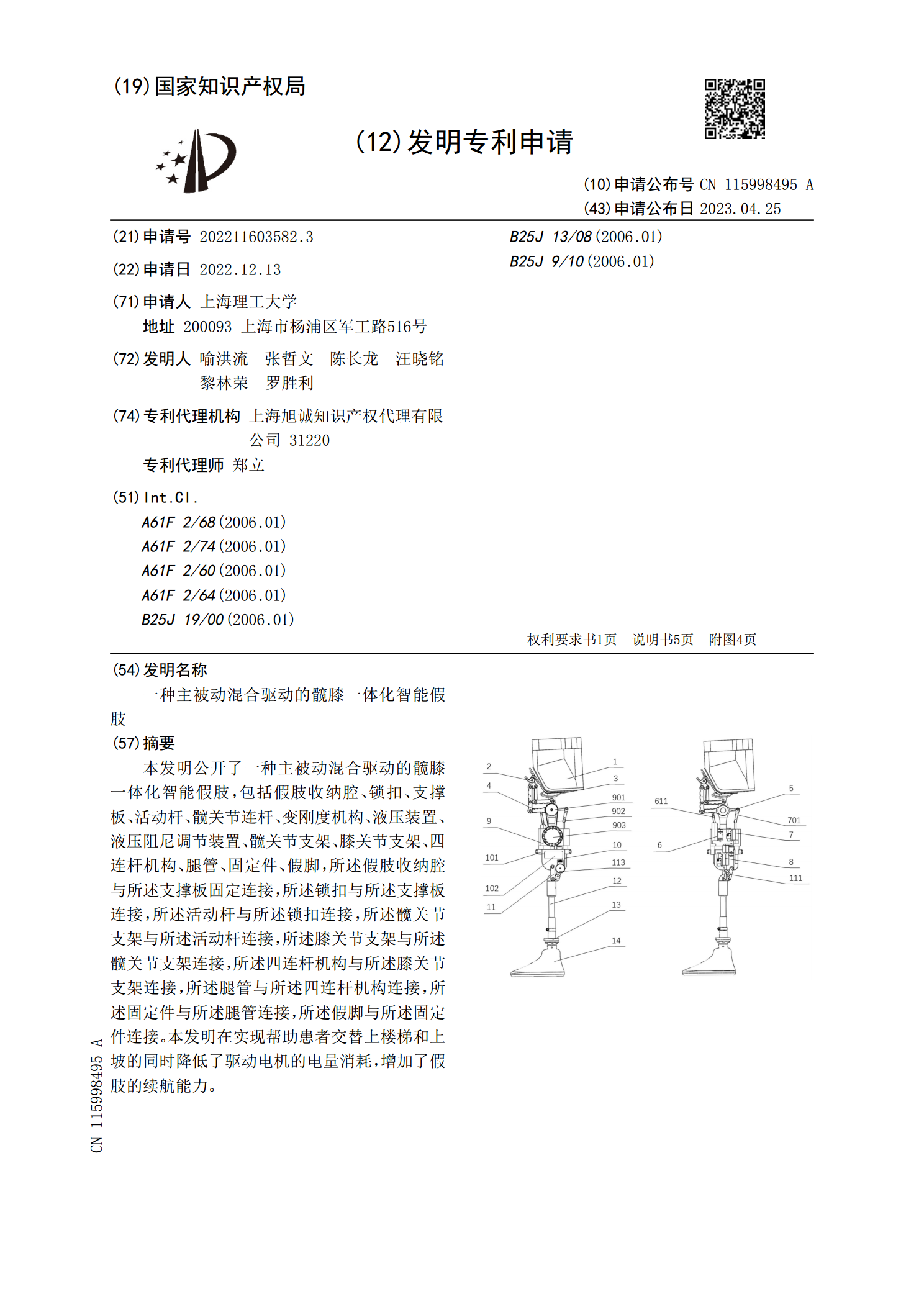
本发明公开了一种主被动混合驱动的髋膝一体化智能假肢,包括假肢收纳腔、锁扣、支撑板、活动杆、髋关节连杆、变刚度机构、液压装置、液压阻尼调节装置、髋关节支架、膝关节支架、四连杆机构、腿管、固定件、假脚,所述假肢收纳腔与所述支撑板固定连接,所述锁扣与所述支撑板连接,所述活动杆与所述锁扣连接,所述髋关节支架与所述活动杆连接,所述膝关节支架与所述髋关节支架连接,所述四连杆机构与所述膝关节支架连接,所述腿管与所述四连杆机构连接,所述固定件与所述腿管连接,所述假脚与所述固定件连接。本发明在实现帮助患者交替上楼梯和上坡的
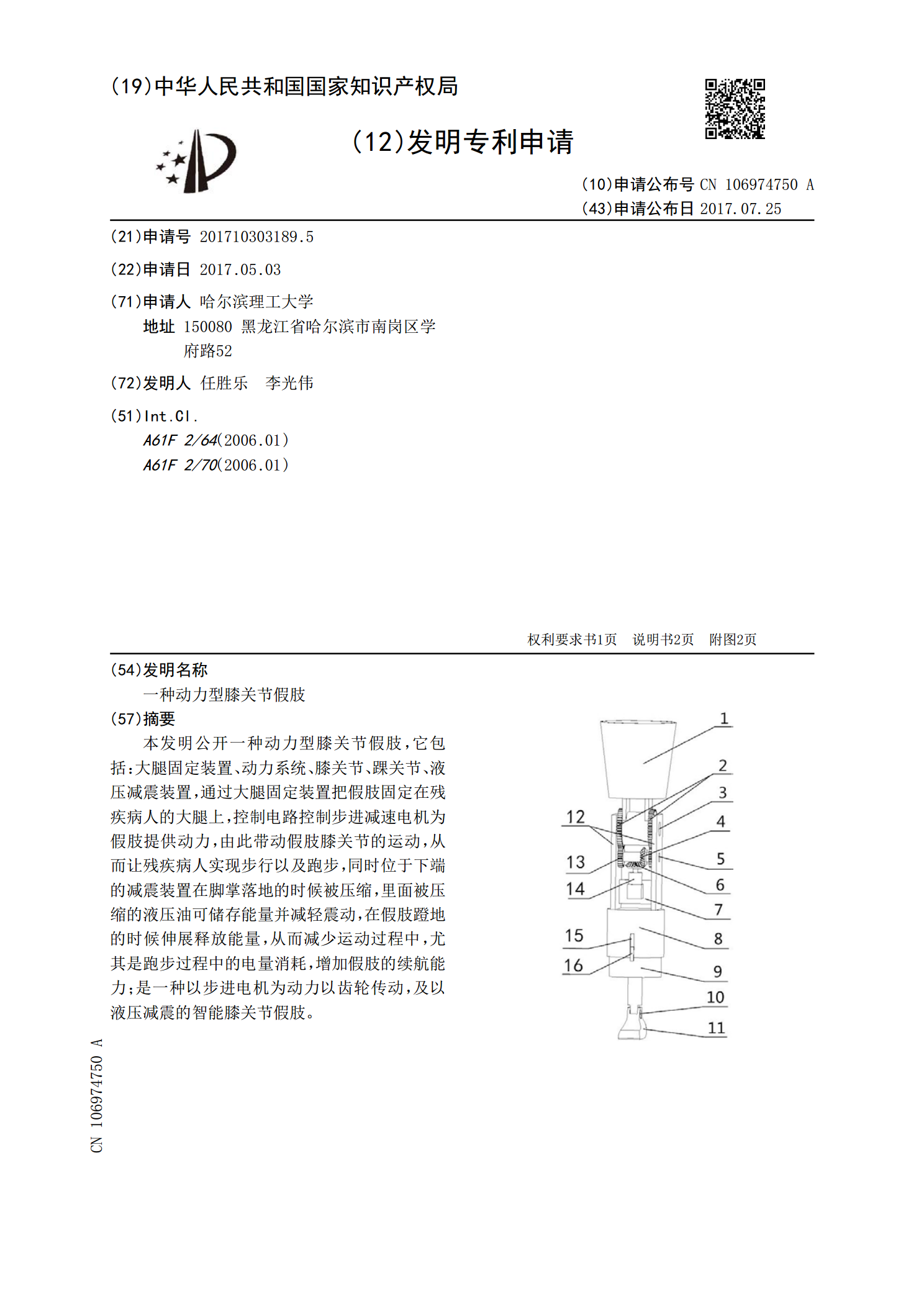
一种动力型膝关节假肢.pdf
本发明公开一种动力型膝关节假肢,它包括:大腿固定装置、动力系统、膝关节、踝关节、液压减震装置,通过大腿固定装置把假肢固定在残疾病人的大腿上,控制电路控制步进减速电机为假肢提供动力,由此带动假肢膝关节的运动,从而让残疾病人实现步行以及跑步,同时位于下端的减震装置在脚掌落地的时候被压缩,里面被压缩的液压油可储存能量并减轻震动,在假肢蹬地的时候伸展释放能量,从而减少运动过程中,尤其是跑步过程中的电量消耗,增加假肢的续航能力;是一种以步进电机为动力以齿轮传动,及以液压减震的智能膝关节假肢。