
自卸车及倒车辅助装置.pdf

书生****瑞梦

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自卸车及倒车辅助装置.pdf
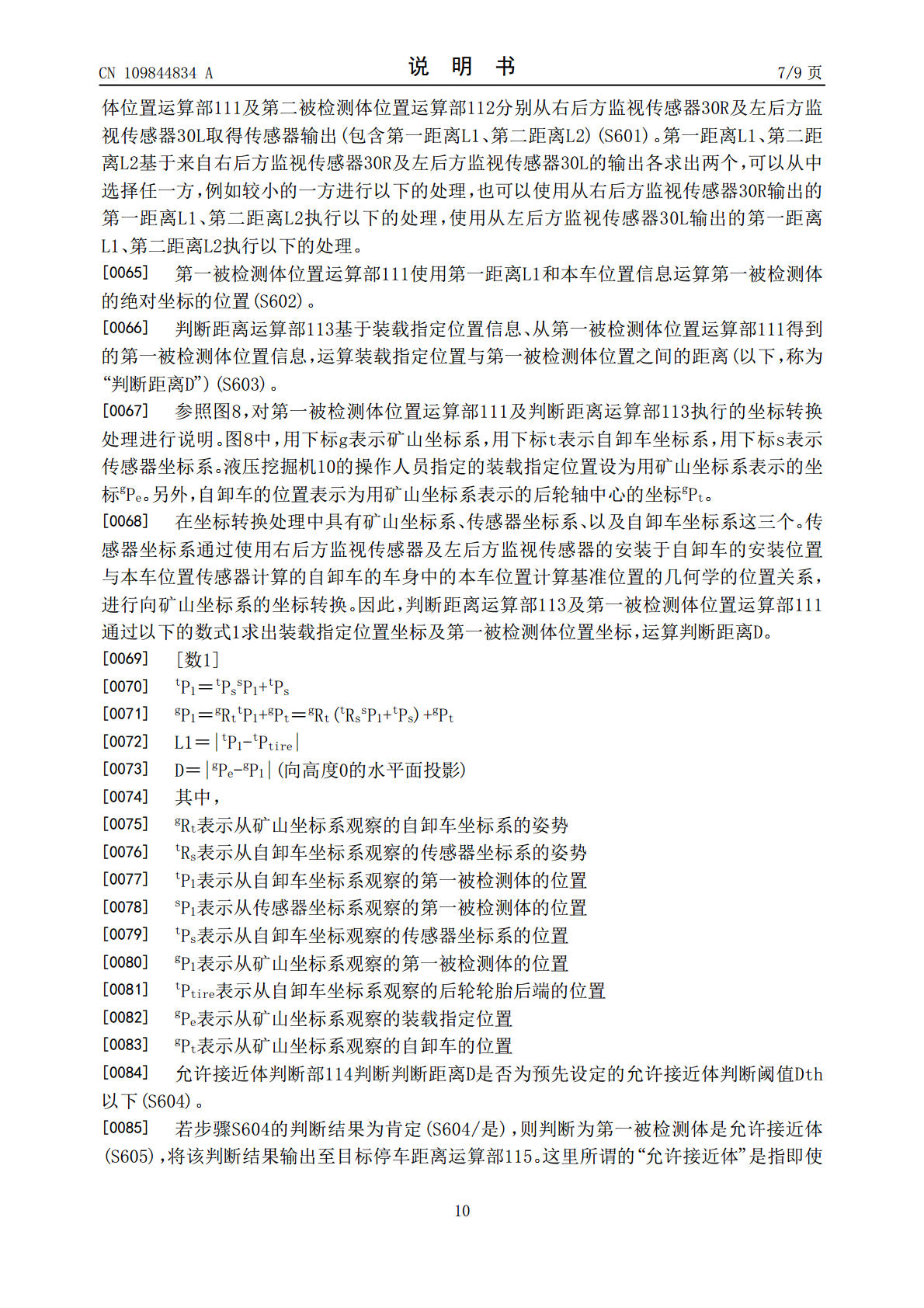
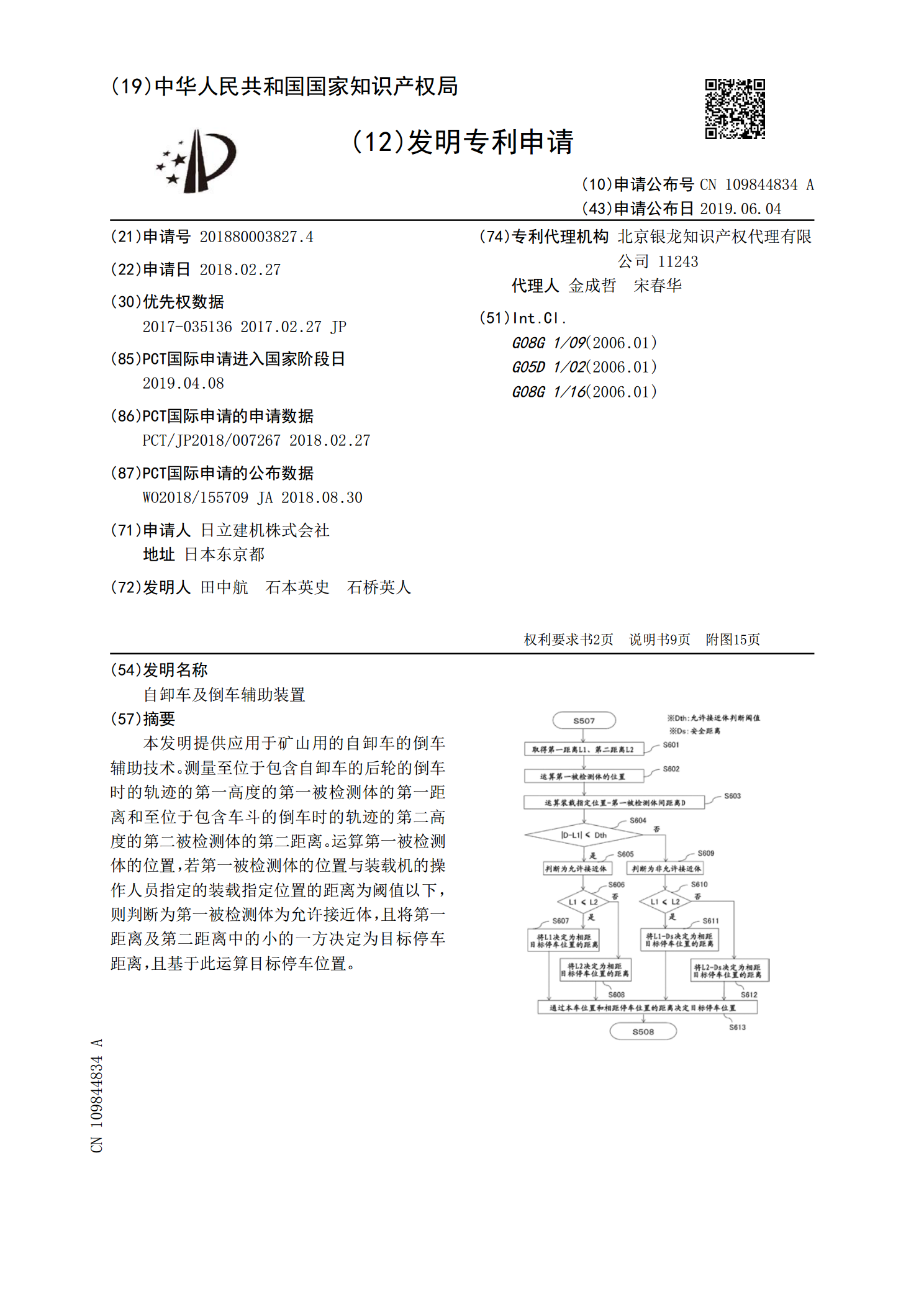
本发明提供应用于矿山用的自卸车的倒车辅助技术。测量至位于包含自卸车的后轮的倒车时的轨迹的第一高度的第一被检测体的第一距离和至位于包含车斗的倒车时的轨迹的第二高度的第二被检测体的第二距离。运算第一被检测体的位置,若第一被检测体的位置与装载机的操作人员指定的装载指定位置的距离为阈值以下,则判断为第一被检测体为允许接近体,且将第一距离及第二距离中的小的一方决定为目标停车距离,且基于此运算目标停车位置。

商用车倒车辅助装置.pdf
本发明提供一种采用电动控制的商用车倒车辅助装置,改变了以往需要一人在车下指挥或者驾驶员多次上下车才能完成倒车的局面,驾驶员一个人在车下就可以完成倒车,减少了劳动力成本,降低了劳动强度,提高了工作效率。该种商用车倒车辅助装置,其特征在于包括:行星轮系、中间齿轮、第一步进电机、第二步进电机和挡块;中间齿轮套设在汽车转向柱上并且与行星轮系中的行星齿轮组啮合,第一步进电机驱动行星轮系中的太阳轮自转,行星轮系中的行星架底部设有多个挡柱,第二步进电机的输出端与挡块连接;当需要进行辅助倒车时,第二步进电机驱动挡块转动使

一种汽车倒车时轮胎位置监控装置及倒车辅助装置.pdf
一种汽车倒车时轮胎位置监控装置,包括方向盘转角传感器以及车轮位置显示单元,方向盘转角位置传感器的Ⅰ线接地;Ⅱ线接倒车灯的正极;Ⅲ线的输出信号与车轮显示模块连接。当控制倒车灯亮的同时方向盘转角传感器也正常工作,由于方向盘转角传感器Ⅲ线输出的直流电压还给车轮显示模块供电,因而车轮显示模块也开始工作,车轮位置显示模块的指针会根据方向盘转角传感器Ⅲ线的输出的直流电压的变化而位于不同的位置且指针的显示连续可变,因此可用于告知驾驶员车轮的转向信息,汽车倒车时轮胎位置监控装置还与现有的倒车辅助装置共用方向盘转角传感器,
一种自卸车卸货辅助装置.pdf
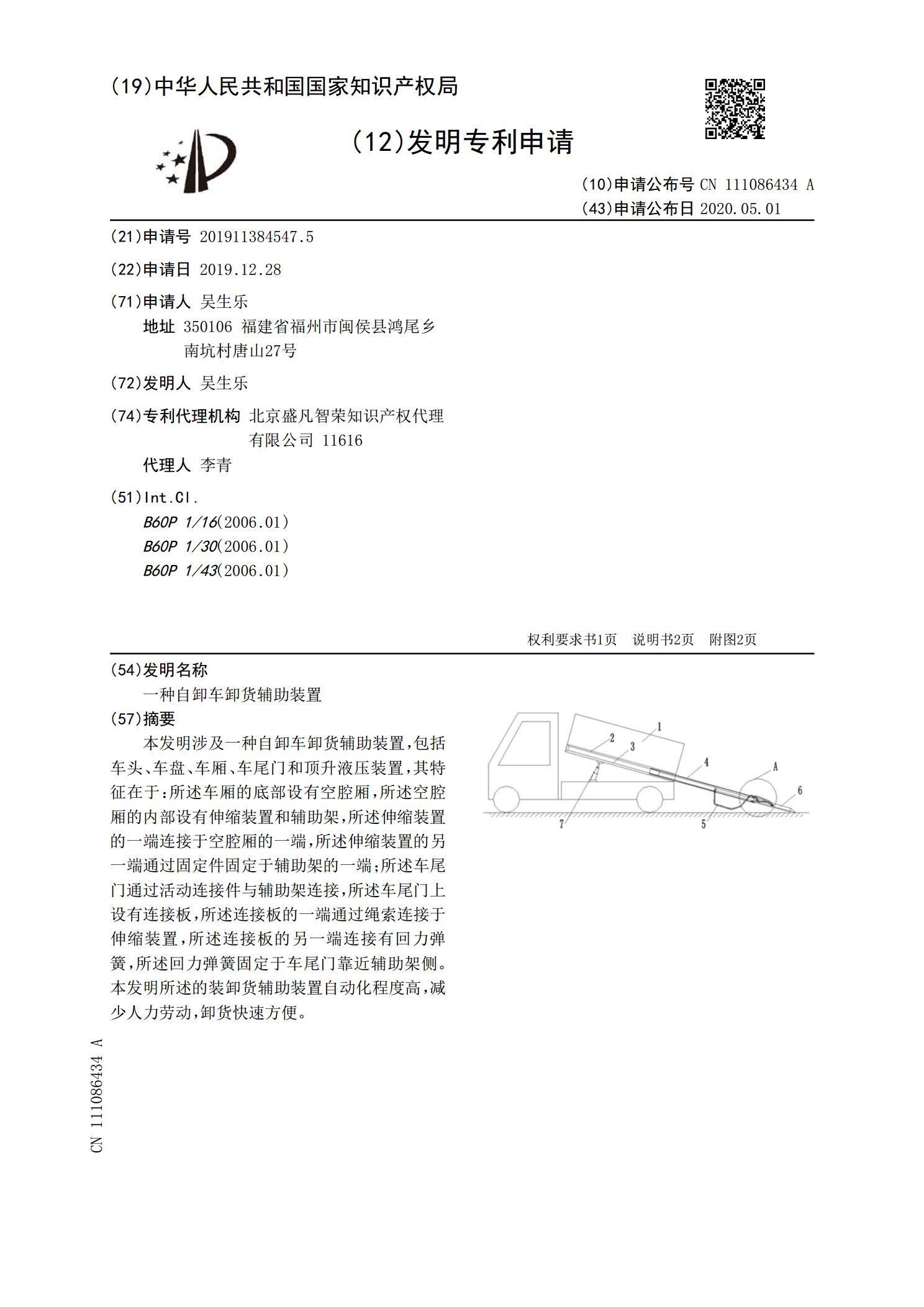
本发明涉及一种自卸车卸货辅助装置,包括车头、车盘、车厢、车尾门和顶升液压装置,其特征在于:所述车厢的底部设有空腔厢,所述空腔厢的内部设有伸缩装置和辅助架,所述伸缩装置的一端连接于空腔厢的一端,所述伸缩装置的另一端通过固定件固定于辅助架的一端;所述车尾门通过活动连接件与辅助架连接,所述车尾门上设有连接板,所述连接板的一端通过绳索连接于伸缩装置,所述连接板的另一端连接有回力弹簧,所述回力弹簧固定于车尾门靠近辅助架侧。本发明所述的装卸货辅助装置自动化程度高,减少人力劳动,卸货快速方便。
一种自卸车用卸货辅助装置.pdf
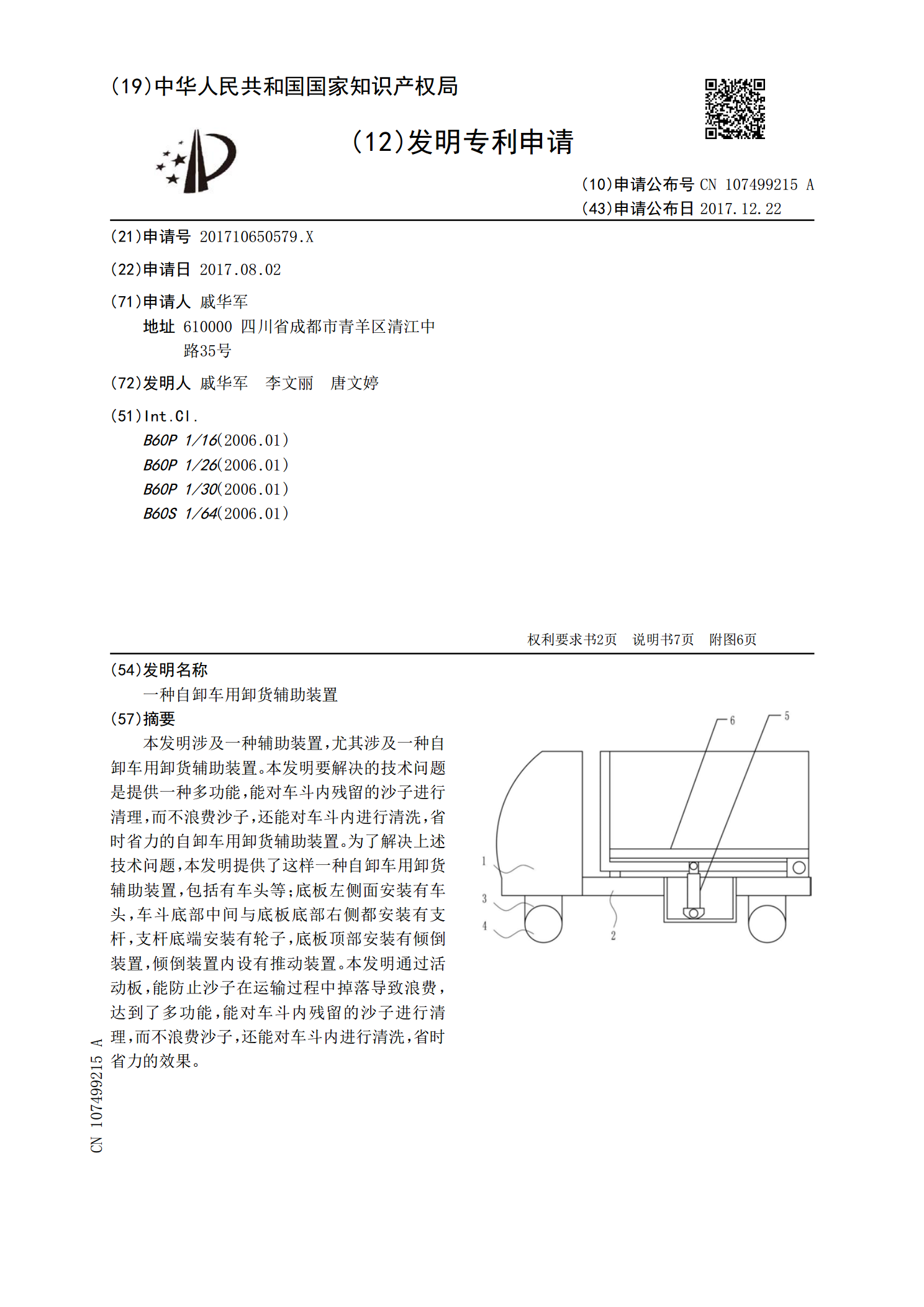
本发明涉及一种辅助装置,尤其涉及一种自卸车用卸货辅助装置。本发明要解决的技术问题是提供一种多功能,能对车斗内残留的沙子进行清理,而不浪费沙子,还能对车斗内进行清洗,省时省力的自卸车用卸货辅助装置。为了解决上述技术问题,本发明提供了这样一种自卸车用卸货辅助装置,包括有车头等;底板左侧面安装有车头,车斗底部中间与底板底部右侧都安装有支杆,支杆底端安装有轮子,底板顶部安装有倾倒装置,倾倒装置内设有推动装置。本发明通过活动板,能防止沙子在运输过程中掉落导致浪费,达到了多功能,能对车斗内残留的沙子进行清理,而不浪费