
基于机器视觉的渐开线圆柱齿轮齿距累积误差测量方法.pdf

一吃****成益


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器视觉的渐开线圆柱齿轮齿距累积误差测量方法.pdf
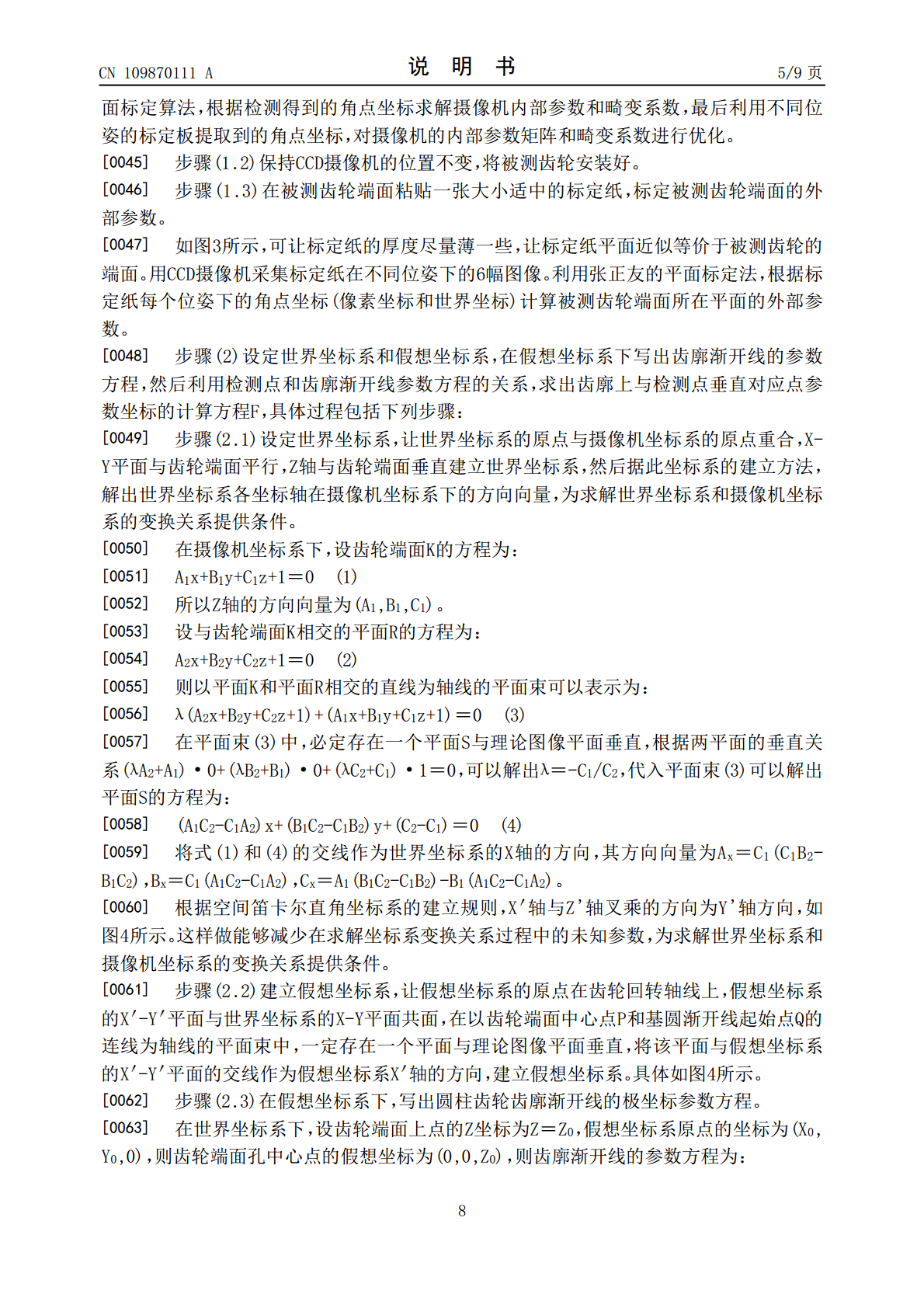
本发明涉及一种基于机器视觉的渐开线圆柱齿轮齿距累积误差测量方法,属于机器视觉测量技术领域。先通过设定世界坐标系和假想坐标系写出齿廓渐开线的参数方程,然后在假想坐标系下利用检测点和齿廓渐开线参数方程的关系,求出齿廓上与检测点垂直对应点参数坐标的计算方程,再将该计算方程转换到世界坐标系,据此在世界坐标系X‑Y平面建立齿廓渐开线方程的几何拟合模型;最后,利用拟合齿廓渐开线方程得到的齿轮基圆半径和齿廓渐开线起始角,求出渐开线圆柱齿轮的齿距累积误差。本发明采用机器视觉测量技术,采用几何拟合齿廓渐开线方程的方法,实现
直齿圆柱齿轮渐开线齿形误差视觉测量方法.pdf
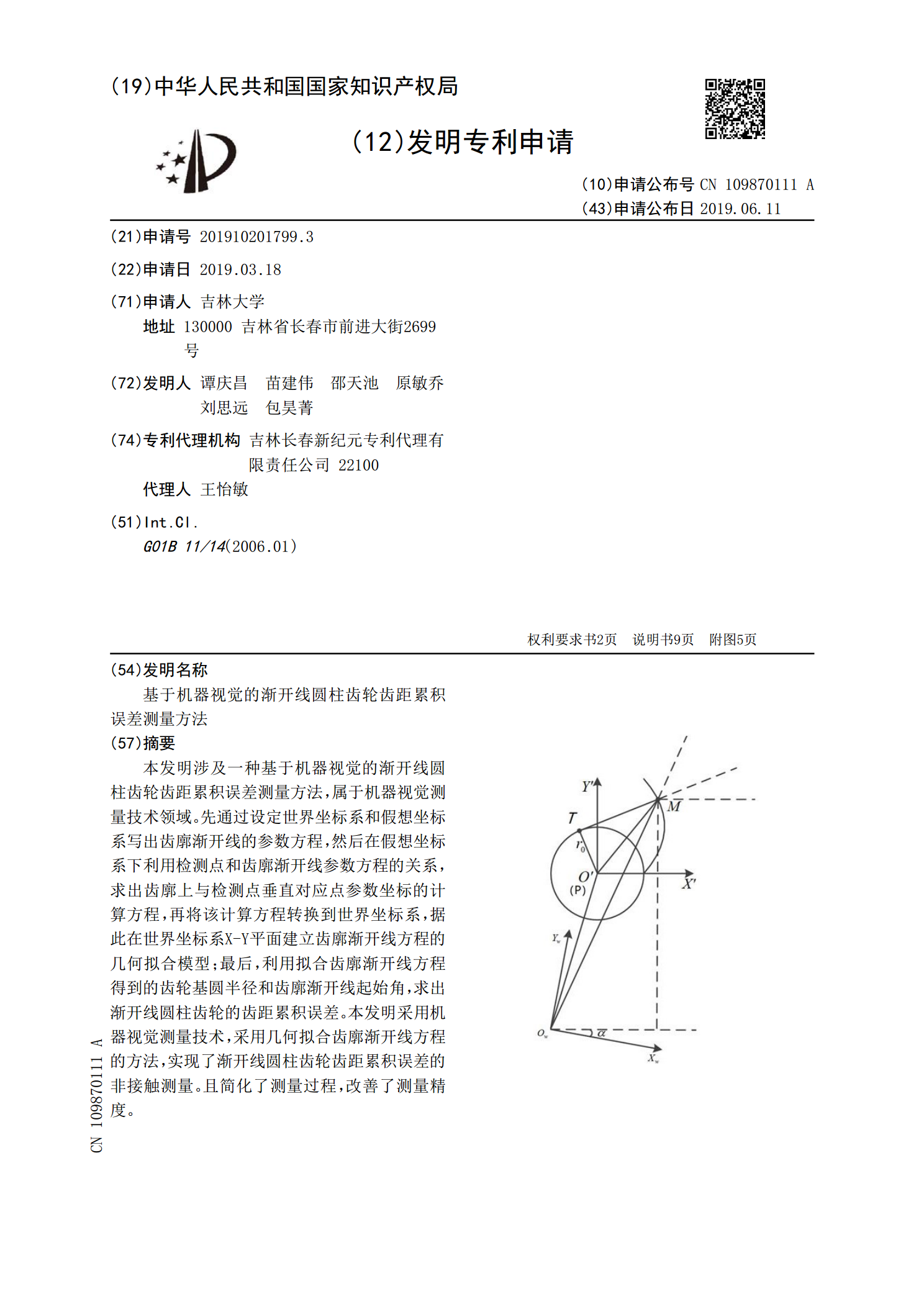
本发明涉及一种直齿圆柱齿轮渐开线齿形误差视觉测量方法,基于一字线激光视觉成像系统,建立渐开线齿形误差的测量模型,结合光条中心线检测技术、角点检测技术和摄像机标定技术等实现被测目标的测量,其包括以下步骤:1)标定激光主动照明下的视觉成像模型;2)标定伪光平面方程参数;3)计算齿廓表面被测点三维坐标;4)计算齿廓表面渐开线齿形误差。本发明采取了视觉测量技术,因此能实现在线非接触检测,同时采用了精确的激光主动照明技术,能保证较高的测量精度,对于IT6-8级精度齿轮,其测量精度小于等于±0.015mm。
基于机器视觉的换热器翅片齿距测量方法、装置及介质.pdf
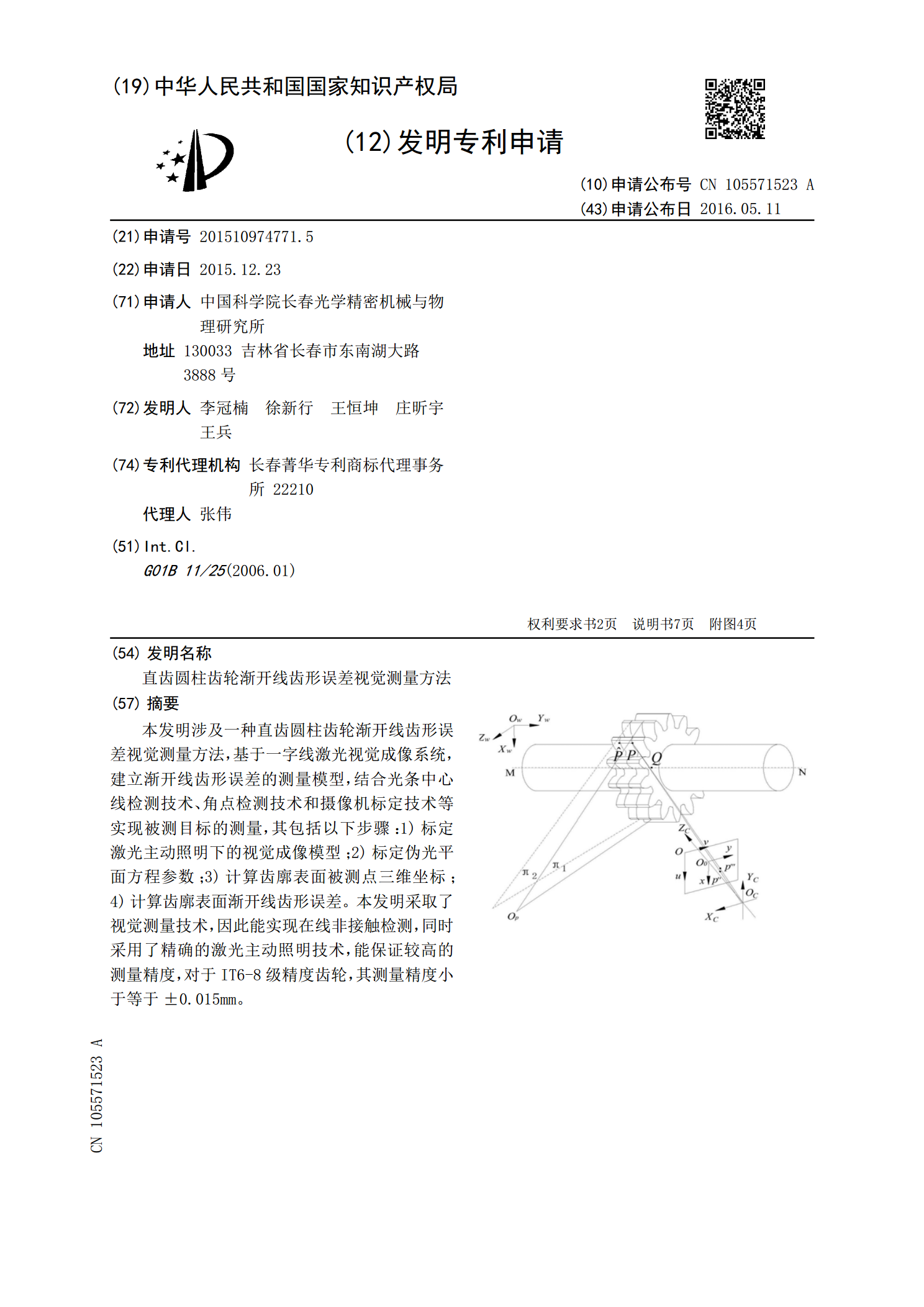
本申请提出了一种基于机器视觉的换热器翅片齿距测量方法、装置及介质,该方法包括:对采集的换热器翅片的图像进行前景提取,确定仅包含翅片的目标图像;通过水平方向的矩形卡尺对目标图像进行扫描,确定翅片的边缘点坐标;基于随机抽样一致RANSAC算法对边缘点坐标进行直线拟合,计算翅片的边缘直线,得到边缘直线的解析方程;计算翅片中相邻两个齿的边缘直线间的平均距离,将平均距离确定为翅片的齿距。该方法基于RANSAC的卡尺直线检测法可以更加精确的检测直线,并通过解析齿侧直线的方程和分段投影法计算相邻齿距,提高了翅片齿距测量

基于ABAQUS的渐开线斜齿圆柱齿轮传动误差研究.docx
基于ABAQUS的渐开线斜齿圆柱齿轮传动误差研究标题:基于ABAQUS的渐开线斜齿圆柱齿轮传动误差研究摘要:渐开线斜齿圆柱齿轮是常用的传动元件之一,其传动精度对于机械系统的运转稳定性和寿命有着重要的影响。本文以渐开线斜齿圆柱齿轮传动误差研究为目标,利用ABAQUS有限元分析软件对其齿轮传动过程进行模拟,通过研究其传动误差特性,为优化设计和制造提供理论依据。关键词:渐开线斜齿圆柱齿轮;传动误差;ABAQUS;有限元分析;齿轮优化设计1.引言渐开线斜齿圆柱齿轮是一种常用的动力传动元件,具有传递大转矩、传动效率

基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测.docx
基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测标题:基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测摘要:齿轮是机械传动系统中常用的元件之一,其齿形缺陷对传动性能有着重要影响。本论文基于视觉技术,提出了一种基于标准渐开线直齿圆柱齿轮齿形缺陷检测方法。通过图像处理和缺陷识别算法,实现对齿轮表面的缺陷进行自动检测和分类。经过测试和实验验证,该方法具有较高的检测准确性和鲁棒性。关键词:齿轮,齿形缺陷,视觉技术,图像处理,缺陷识别1.引言齿轮是机械传动中最重要的元件之一,广泛应用于各种机械设备中。齿轮传动效率和传动精度