
直齿圆柱齿轮渐开线齿形误差视觉测量方法.pdf

一只****iu


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
直齿圆柱齿轮渐开线齿形误差视觉测量方法.pdf
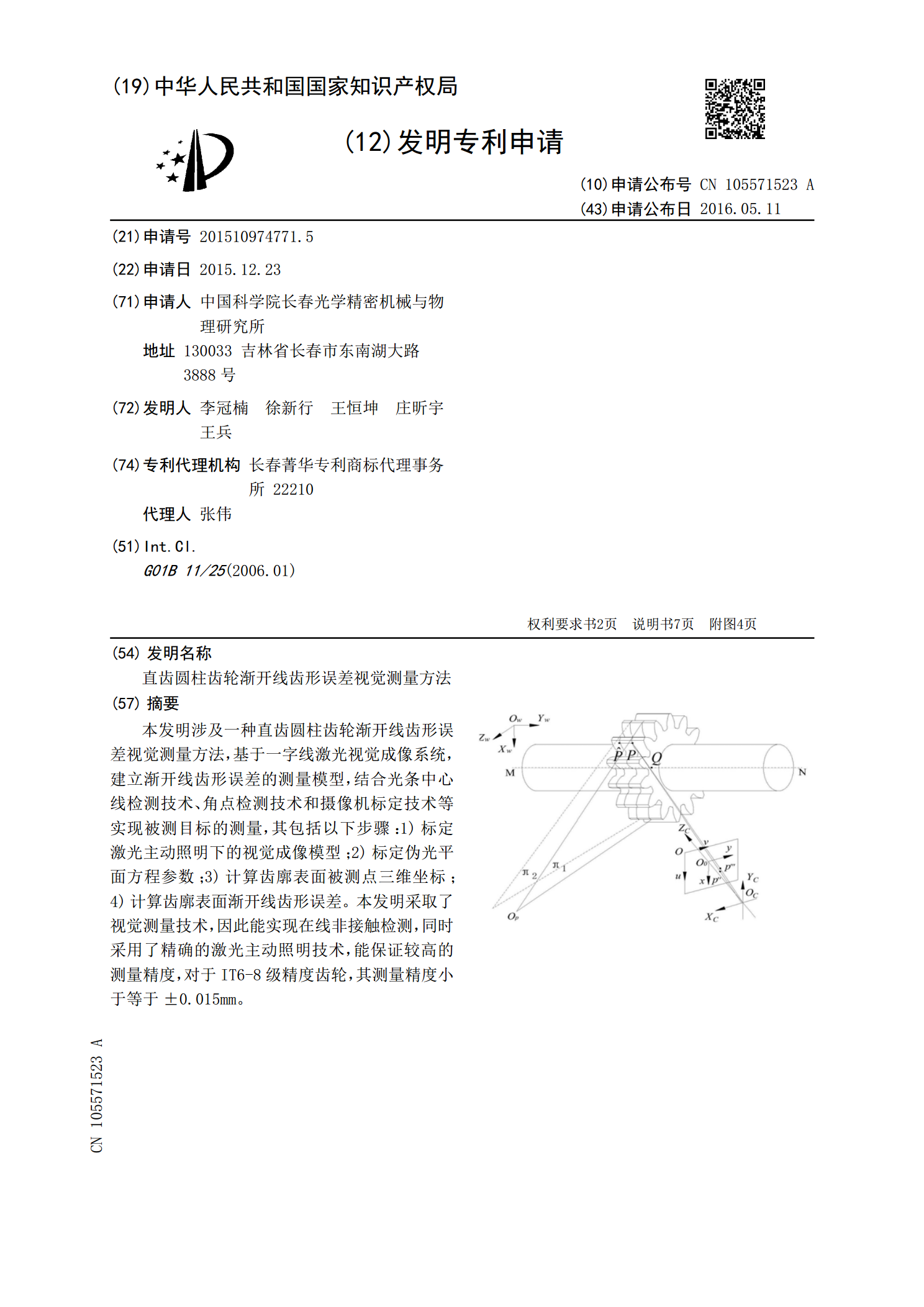
本发明涉及一种直齿圆柱齿轮渐开线齿形误差视觉测量方法,基于一字线激光视觉成像系统,建立渐开线齿形误差的测量模型,结合光条中心线检测技术、角点检测技术和摄像机标定技术等实现被测目标的测量,其包括以下步骤:1)标定激光主动照明下的视觉成像模型;2)标定伪光平面方程参数;3)计算齿廓表面被测点三维坐标;4)计算齿廓表面渐开线齿形误差。本发明采取了视觉测量技术,因此能实现在线非接触检测,同时采用了精确的激光主动照明技术,能保证较高的测量精度,对于IT6-8级精度齿轮,其测量精度小于等于±0.015mm。

基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测.docx
基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测标题:基于视觉的标准渐开线直齿圆柱齿轮齿形缺陷检测摘要:齿轮是机械传动系统中常用的元件之一,其齿形缺陷对传动性能有着重要影响。本论文基于视觉技术,提出了一种基于标准渐开线直齿圆柱齿轮齿形缺陷检测方法。通过图像处理和缺陷识别算法,实现对齿轮表面的缺陷进行自动检测和分类。经过测试和实验验证,该方法具有较高的检测准确性和鲁棒性。关键词:齿轮,齿形缺陷,视觉技术,图像处理,缺陷识别1.引言齿轮是机械传动中最重要的元件之一,广泛应用于各种机械设备中。齿轮传动效率和传动精度

直齿圆柱齿轮参数视觉测量方法研究.docx
直齿圆柱齿轮参数视觉测量方法研究直齿圆柱齿轮是机械传动系统中常见的元件,其参数测量对于保证传动系统的稳定性和精度起着重要作用。传统的直齿圆柱齿轮参数测量方法主要依靠手工测量和机械测量仪器,存在测量精度低、效率低、劳动强度大等问题。因此,研究一种基于视觉技术的直齿圆柱齿轮参数测量方法具有重要的理论意义和实际应用价值。本文旨在探讨基于视觉技术的直齿圆柱齿轮参数测量方法,通过分析直齿圆柱齿轮的几何特征和参数之间的关系,建立测量模型,并选取合适的视觉测量设备和算法,实现对直齿圆柱齿轮参数的快速、准确测量。首先,我

渐开线直齿圆柱齿轮.ppt
渐开线标准直齿圆柱齿轮部分名称和基本尺寸(一)直齿圆柱齿轮各部分的名称及符号分度圆:对标准齿轮来说,齿厚与齿槽宽相等的那个圆称为分度圆,直径用d表示。分度圆上的齿厚和齿槽宽分别用s和e表示,即s=e。周节或齿距:相邻两齿在分度圆上对应点间的弧长,用p表示,p=s+e。(二)直齿圆柱齿轮的基本参数1.模数m2.压力角a3.齿顶高系数ha*和顶隙系数c*(三)标准直齿圆柱齿轮的几何尺寸关系

渐开线直齿圆柱齿轮.doc
渐开线直齿圆柱齿轮创建方法的探讨一、前言渐开线齿轮作为最常用的机械传动零件,被广泛地应用于机械、冶金、石化、煤炭和水电等行业。在齿轮的设计、分析和制造过程中,工程技术人员经常需要设计出所需参数的齿轮。利用Pro/ENGINEER零件设计模块可以精确创建齿轮的三维模型,但改变齿数、模数等参数后,又需要进行复杂的设计计算和造型形状判断,工作量很大。如何在极短的时间内创建出齿轮的三维造型,国内外许多人员对此都进行了相关研究,也取得了一定成果。笔者通过不断探索和实践,总结出两种创建渐开线直齿圆柱齿轮的方法,简单易