
一种附加阻尼控制器、水轮机调速器及水轮机控制系统.pdf

一吃****福乾

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种附加阻尼控制器、水轮机调速器及水轮机控制系统.pdf
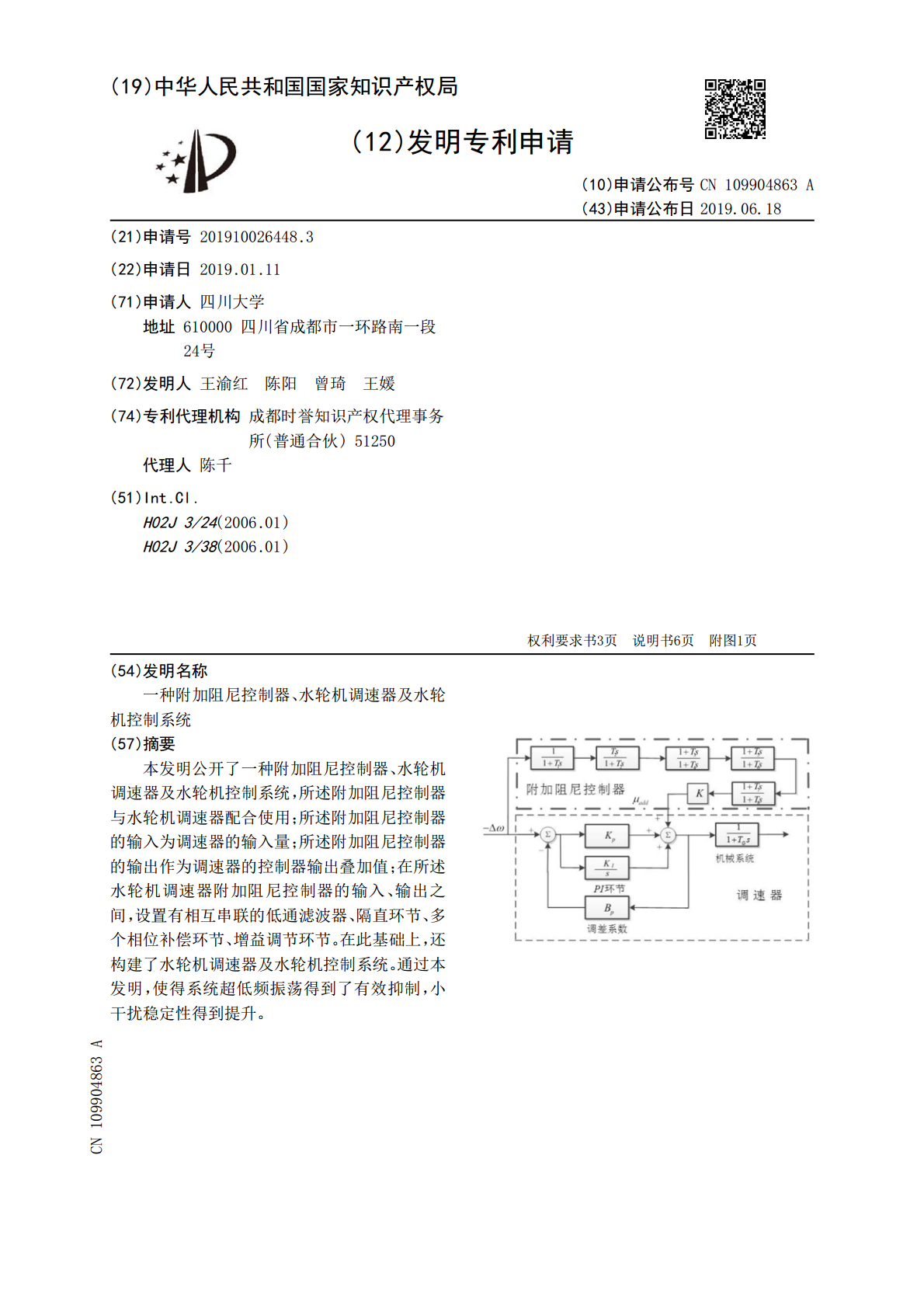
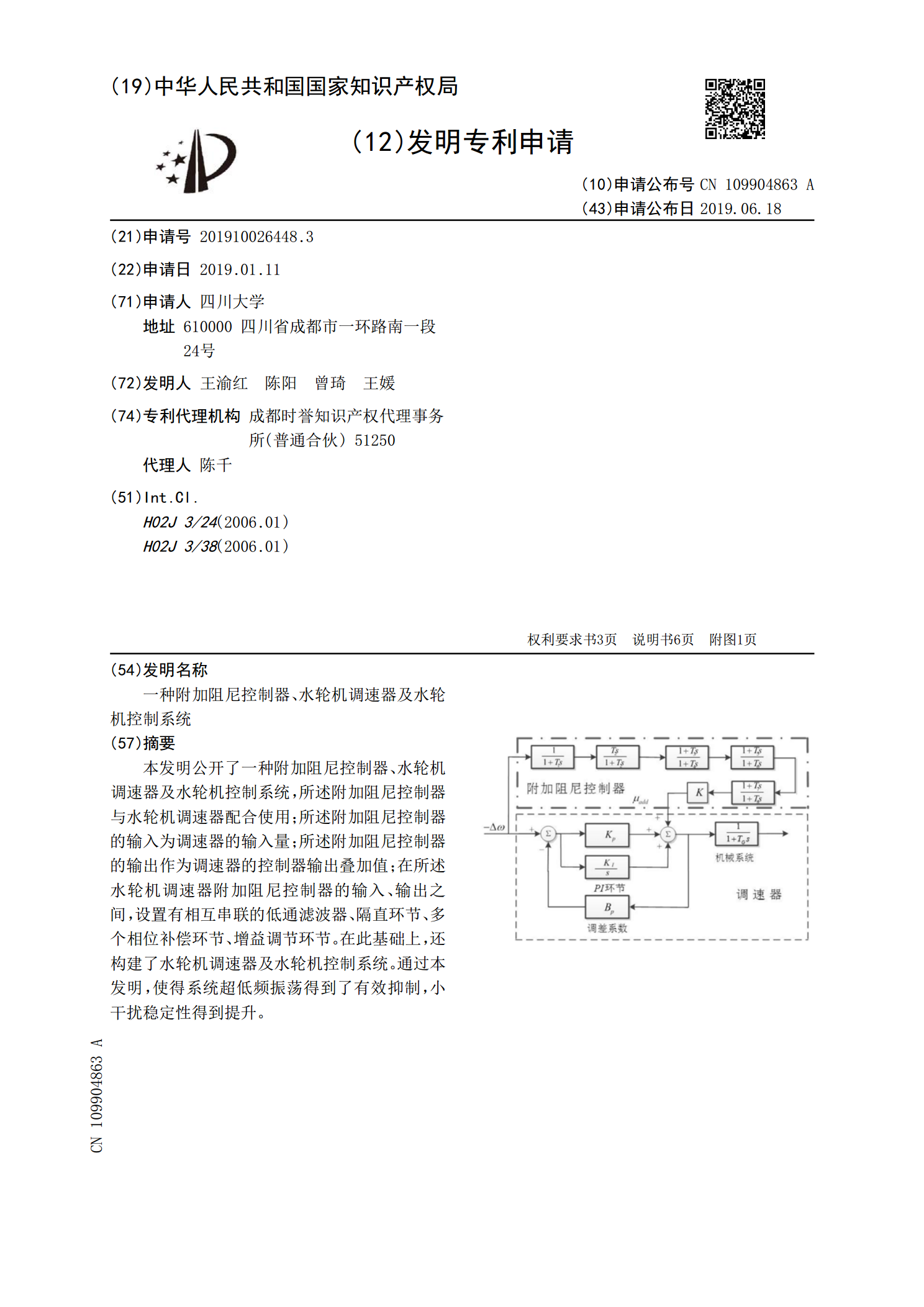
本发明公开了一种附加阻尼控制器、水轮机调速器及水轮机控制系统,所述附加阻尼控制器与水轮机调速器配合使用;所述附加阻尼控制器的输入为调速器的输入量;所述附加阻尼控制器的输出作为调速器的控制器输出叠加值;在所述水轮机调速器附加阻尼控制器的输入、输出之间,设置有相互串联的低通滤波器、隔直环节、多个相位补偿环节、增益调节环节。在此基础上,还构建了水轮机调速器及水轮机控制系统。通过本发明,使得系统超低频振荡得到了有效抑制,小干扰稳定性得到提升。
弱阻尼低频振荡模式的水轮机调速器参数优化方法及系统.pdf
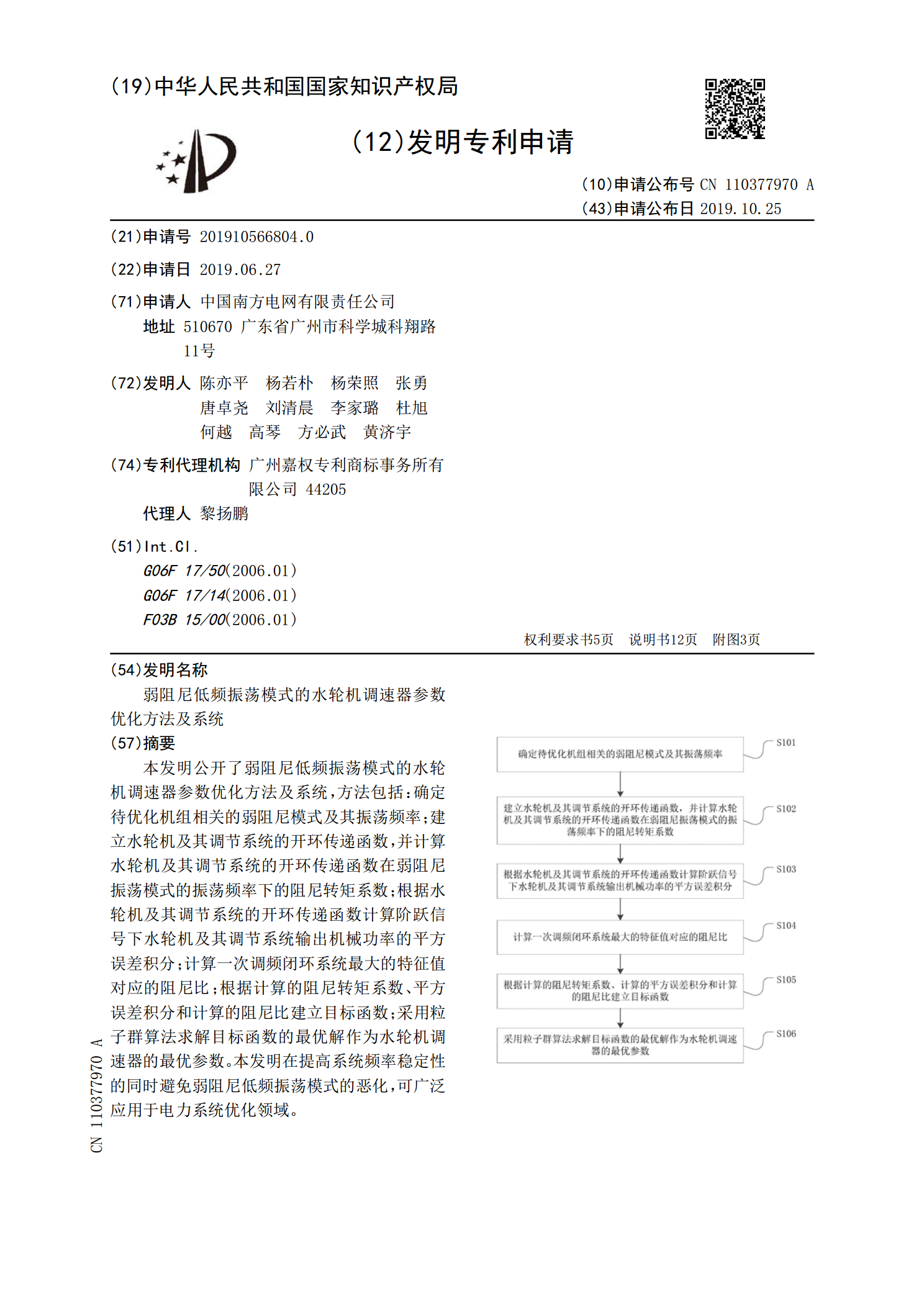
本发明公开了弱阻尼低频振荡模式的水轮机调速器参数优化方法及系统,方法包括:确定待优化机组相关的弱阻尼模式及其振荡频率;建立水轮机及其调节系统的开环传递函数,并计算水轮机及其调节系统的开环传递函数在弱阻尼振荡模式的振荡频率下的阻尼转矩系数;根据水轮机及其调节系统的开环传递函数计算阶跃信号下水轮机及其调节系统输出机械功率的平方误差积分;计算一次调频闭环系统最大的特征值对应的阻尼比;根据计算的阻尼转矩系数、平方误差积分和计算的阻尼比建立目标函数;采用粒子群算法求解目标函数的最优解作为水轮机调速器的最优参数。本发

水轮机调速器系统.ppt
水轮机调速器系统学习主要内容调速系统模拟图电能质量指标调速系统服务对象调速系统主要作用2、控制并联机组间有功功率的分配3、满足机组的正常操作要求:开停机、增减负荷,以及空载时增减转速。4、保证机组的安全运行5、能接受电站计算机监控系统指令,实现机组的经济运行(AGC),满足机组开停机、增减负荷的控制要求。调速器的分类调速器的分类调速器的分类调速器系统的组成2、接力器调速器的执行机构,接力器控制水轮机调速环(控制环)调节导叶开度,以改变进入水轮机的流量。3、油压装置:提供调速系统动力,由压力油罐,回油箱,油

水轮机调速器发展.pptx
会计学调速器结构形式的发展电子调节器型电气液压调速器调速器功能调速器发展测量系统频率测量残压测频测频测相硬件原理图齿盘测速/基于静态频差和动态频差的测量方法(PLC)水位测量位移传感器直线位移传感器导电塑料直线电位器:其线性度好,体积小,安装方便,价格低廉。磁致伸缩传感器:非接触,可靠性高在近年来开发的微机调速器中使用较多。磁致伸缩传感器这种传感器属于非接触式的,可动部分与电路没有直接接触,它体积小,使用方便;但线性度与差动变压器线圈的的绕制工艺有关,分散性较大。控制器发展控制器原理人机界面控制器硬件发展

水轮机调速器培训.doc
水轮机调速器培训教材米建国刘忠良天津市科音自控设备有限公司地址:天津北辰科技园区景观路邮编:300409电话:022-26990200/022-26990202传真:022-26994609Web:http//www.kingac.comEmail:keyin1999@163.com前言根椐近几年来,天津市科音自控设备有限公司举办调速器培训班的经验,及一些电站的实际调试经验,我们编写了新版的调速器培训教材,为使本教材达到深入浅出的效果,参考了一些理论书籍,使本教材真正达到理论联系实际。教材涵盖了天津市科音