
弱阻尼低频振荡模式的水轮机调速器参数优化方法及系统.pdf

春波****公主


1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
弱阻尼低频振荡模式的水轮机调速器参数优化方法及系统.pdf
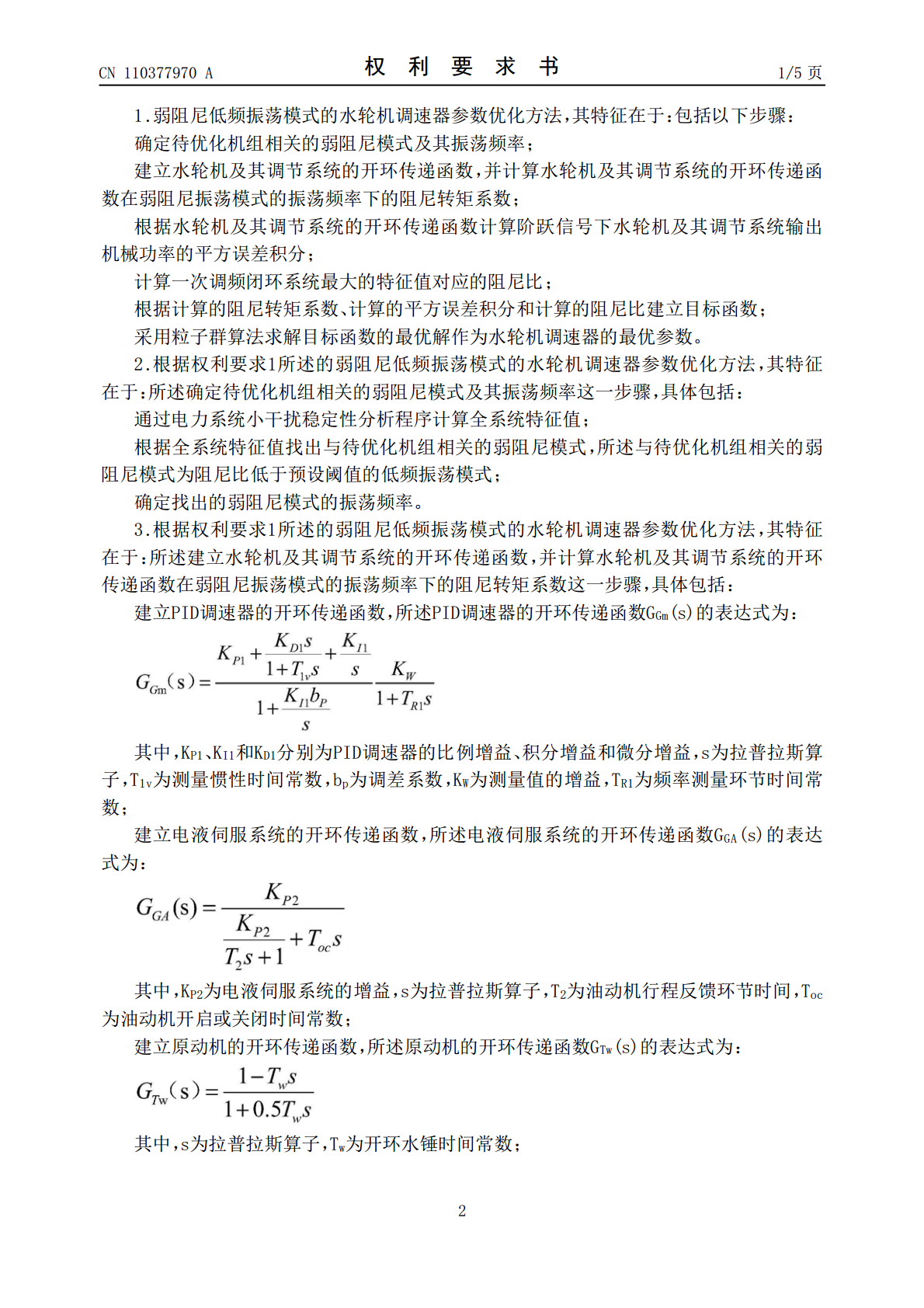
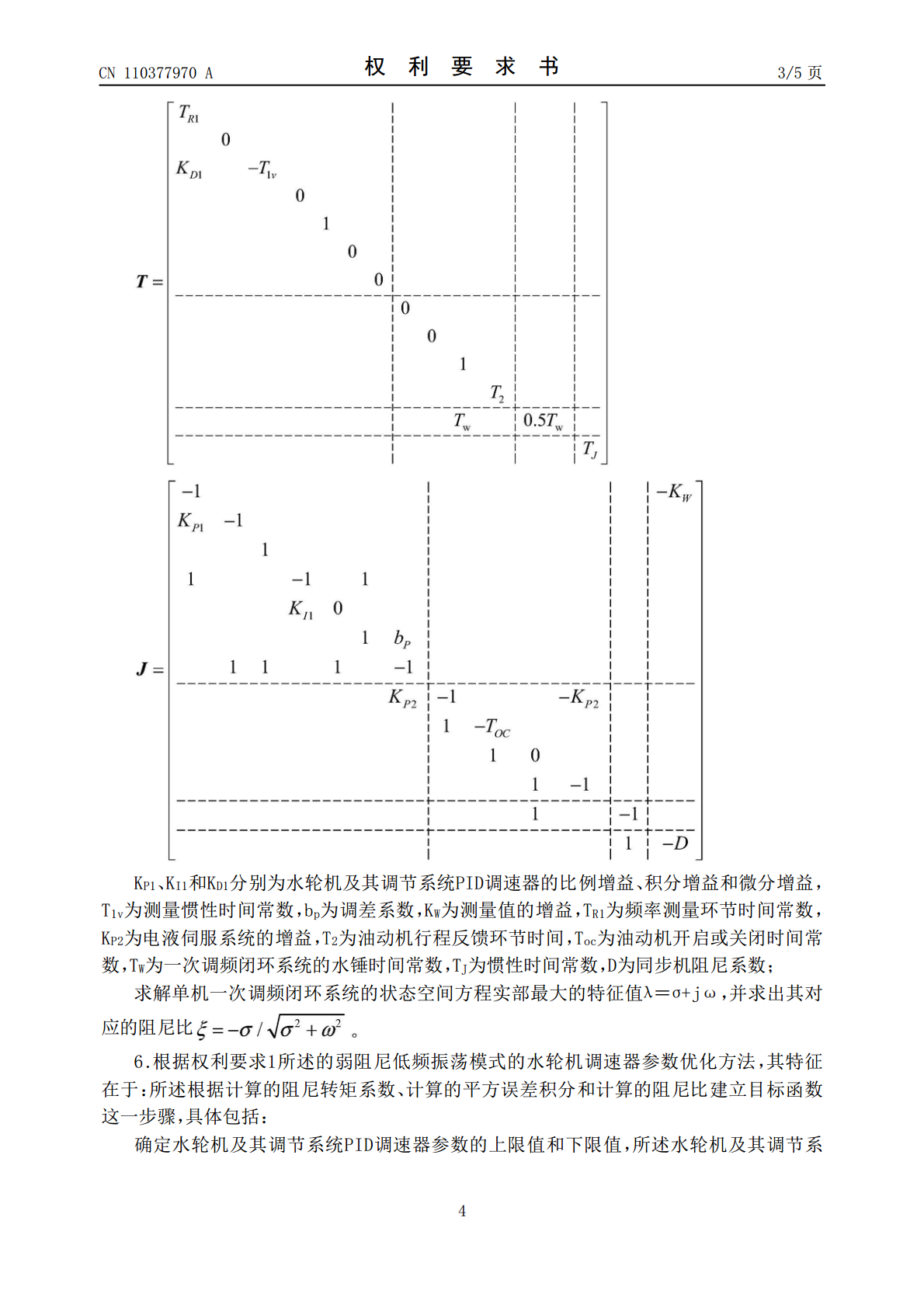
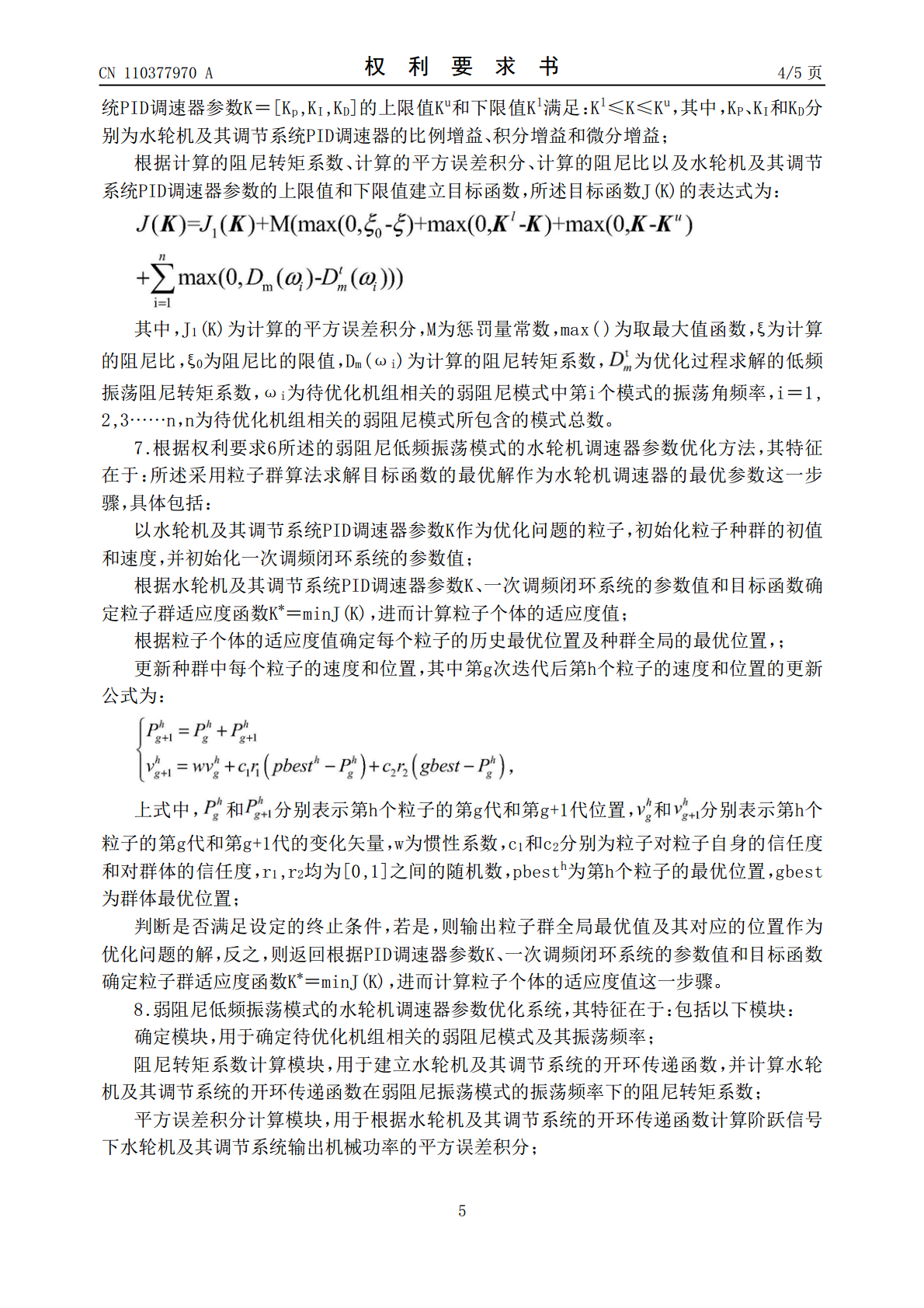
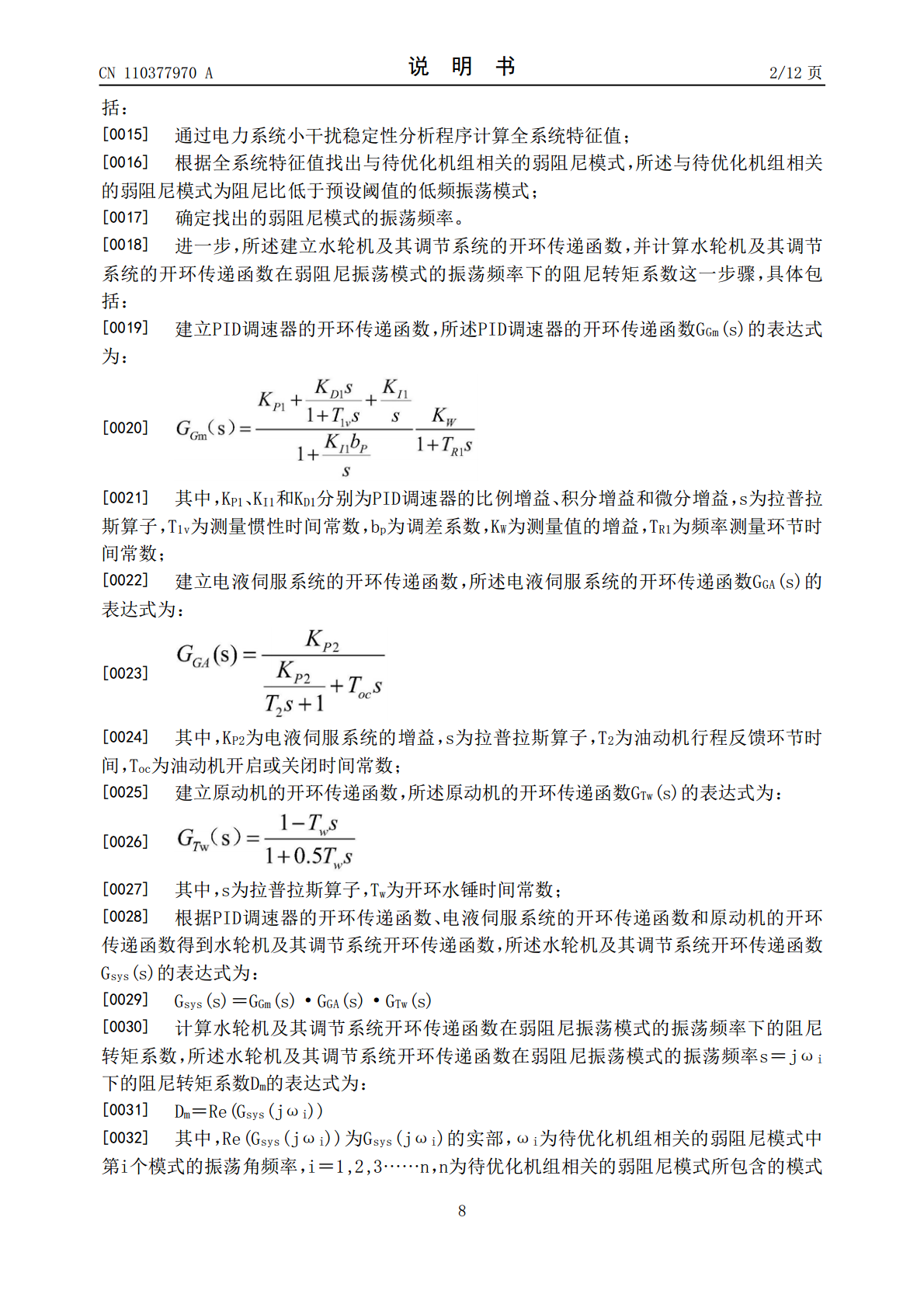
本发明公开了弱阻尼低频振荡模式的水轮机调速器参数优化方法及系统,方法包括:确定待优化机组相关的弱阻尼模式及其振荡频率;建立水轮机及其调节系统的开环传递函数,并计算水轮机及其调节系统的开环传递函数在弱阻尼振荡模式的振荡频率下的阻尼转矩系数;根据水轮机及其调节系统的开环传递函数计算阶跃信号下水轮机及其调节系统输出机械功率的平方误差积分;计算一次调频闭环系统最大的特征值对应的阻尼比;根据计算的阻尼转矩系数、平方误差积分和计算的阻尼比建立目标函数;采用粒子群算法求解目标函数的最优解作为水轮机调速器的最优参数。本发

超低频振荡阻尼控制中的水轮机调速系统参数双层优化策略.pptx
汇报人:目录PARTONEPARTTWO背景介绍阻尼控制的重要性现有阻尼控制方法的优缺点PARTTHREE参数优化目标参数优化方法参数优化过程参数优化结果PARTFOUR优化效果评估指标优化效果实验验证实验结果分析优化效果对比分析PARTFIVE在其他领域的应用前景在未来发展的展望对行业的推动作用对环境保护的意义PARTSIX主要研究成果总结对未来研究的建议和展望THANKYOU

抑制电力系统超低频振荡的水轮机调速器参数优化控制研究.docx
抑制电力系统超低频振荡的水轮机调速器参数优化控制研究摘要水轮机调速器在电力系统中起着至关重要的作用,它的性能对于抑制电力系统超低频振荡具有重要意义。本文以抑制超低频振荡为目标,采用参数优化控制方法对水轮机调速器进行研究,通过对调速器的参数进行优化,提高系统的稳定性和可靠性。首先,论文介绍了电力系统超低频振荡的特点和危害,然后详细阐述了水轮机调速器的工作原理和重要性。接着,提出了参数优化控制的思路和方法。通过对调速器的主要参数进行优化实验和仿真,得到最佳的参数组合。最后,通过对比优化前后的参数组合,验证了优

VSC-HVDC系统对电网低频振荡的阻尼方法及控制参数选取.docx
VSC-HVDC系统对电网低频振荡的阻尼方法及控制参数选取VSC-HVDC系统是一种高电压直流输电技术,可用于将电力从远距离输送到需要的地方。然而,这种系统容易受到电网低频振荡的影响,这种振荡通常由负载不平衡和不稳定的负载引起。在本文中,我们将探讨VSC-HVDC系统对电网低频振荡的阻尼方法以及控制参数的选择。VSC-HVDC系统是一种由电力电子开关控制的高频交流输电系统。由于该系统使用低频电压波形,电压建立时间较短,因此电网低频振荡很容易影响到该系统。电网低频振荡是一种频率在0.1至2赫兹之间的电压振荡

VSC-HVDC系统抑制电网低频振荡的阻尼方法及控制参数选取.docx
VSC-HVDC系统抑制电网低频振荡的阻尼方法及控制参数选取标题:VSC-HVDC系统抑制电网低频振荡的阻尼方法及控制参数选取摘要:电力系统中的低频振荡是导致电网稳定性问题的主要原因之一。VSC-HVDC(可变速调制-高压直流输电)系统作为一种重要的电力输电技术,具有快速响应、灵活控制等特点,被广泛应用于电力系统中。本文将探讨VSC-HVDC系统在抑制电网低频振荡方面的阻尼方法,包括直接电流控制和间接电流控制,并对相应的控制参数进行选取和调整,以提高VSC-HVDC系统的抑制低频振荡能力。1.引言2.VS