
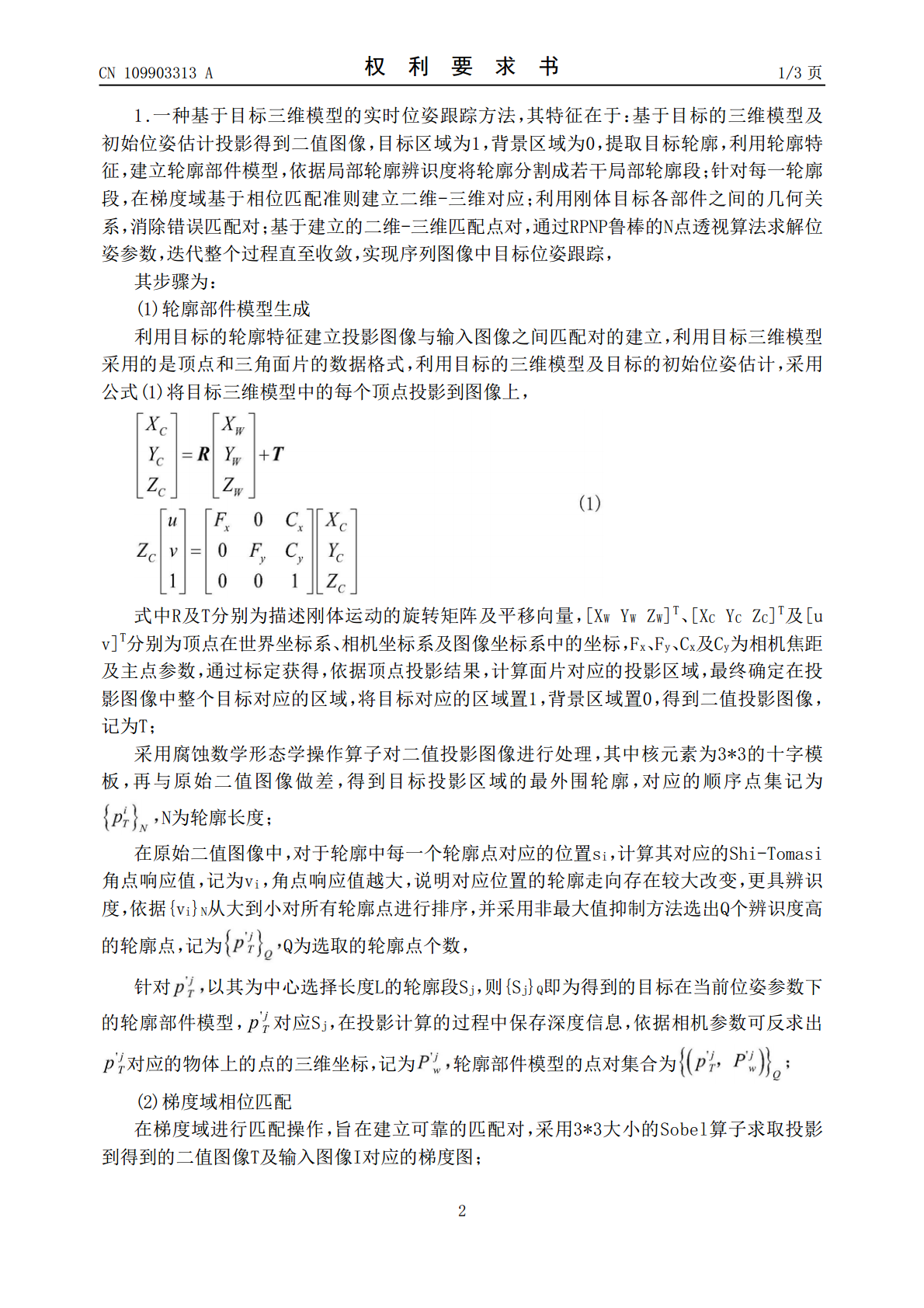
一种基于目标三维模型的实时位姿跟踪方法.pdf

Ma****57

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于目标三维模型的实时位姿跟踪方法.pdf
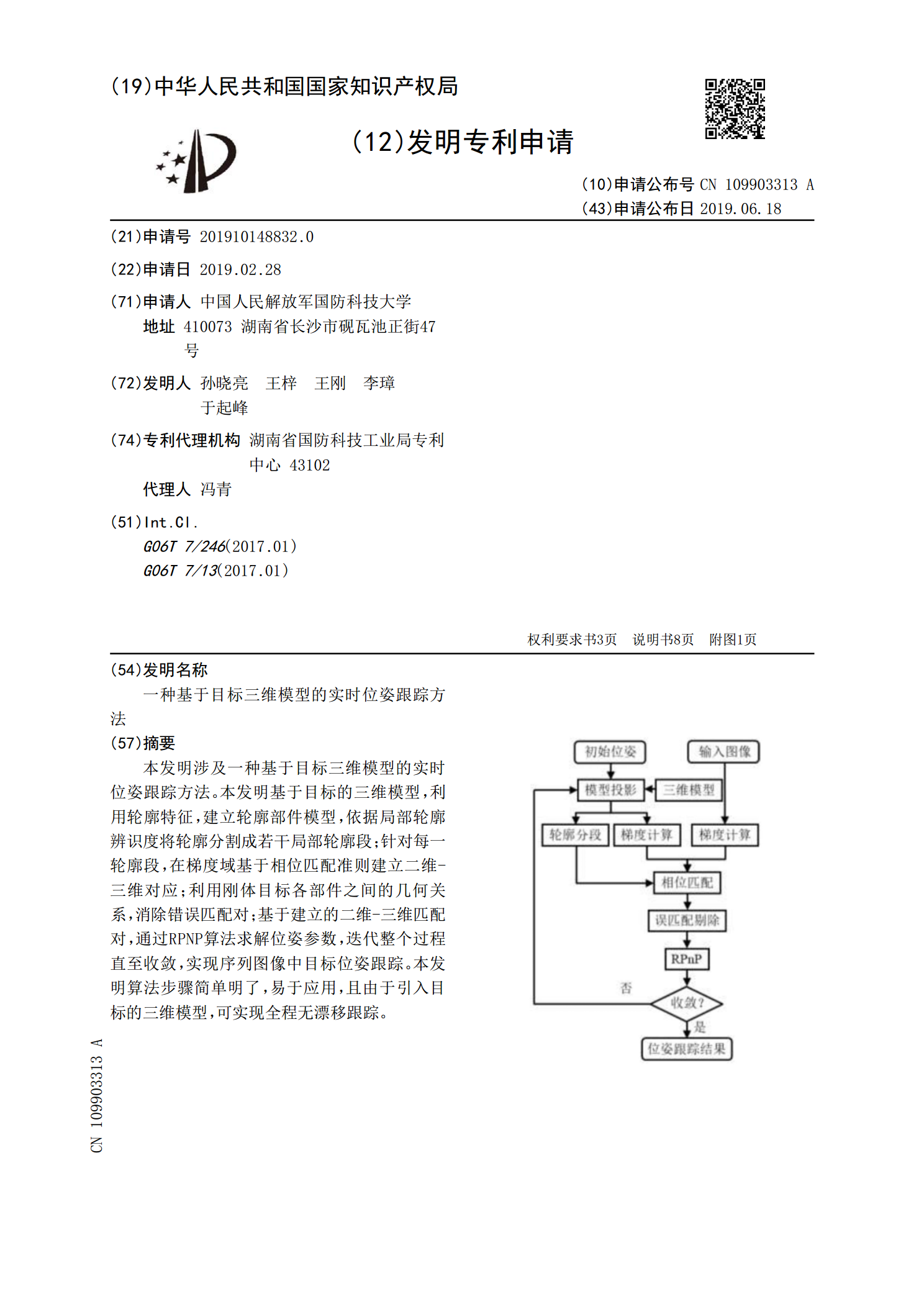
本发明涉及一种基于目标三维模型的实时位姿跟踪方法。本发明基于目标的三维模型,利用轮廓特征,建立轮廓部件模型,依据局部轮廓辨识度将轮廓分割成若干局部轮廓段;针对每一轮廓段,在梯度域基于相位匹配准则建立二维‑三维对应;利用刚体目标各部件之间的几何关系,消除错误匹配对;基于建立的二维‑三维匹配对,通过RPNP算法求解位姿参数,迭代整个过程直至收敛,实现序列图像中目标位姿跟踪。本发明算法步骤简单明了,易于应用,且由于引入目标的三维模型,可实现全程无漂移跟踪。

基于三维模型的空间目标视觉位姿测量.docx
基于三维模型的空间目标视觉位姿测量摘要:随着科技的日益进步,三维模型的应用得到了广泛的普及与应用,尤其是在视觉位姿测量方面。本文将主要介绍基于三维模型的空间目标视觉位姿测量技术,主要包括目标特征提取、匹配和位姿估计三个方面,分别从理论原理、方法流程以及应用案例等方面进行阐述,以便广大研究者更好地理解并应用此技术。关键词:三维模型、视觉位姿测量、目标特征提取、匹配、位姿估计一、引言随着计算机技术的不断发展和进步,三维模型的应用日渐普及。在工业、医学、文化、建筑等多个领域,三维模型都起到了不可或缺的作用。而在

基于三维模型的空间目标视觉位姿测量.pptx
基于三维模型的空间目标视觉位姿测量目录添加目录项标题三维模型构建3D扫描技术三维模型重建算法模型精度与细节处理三维模型库的建立与维护视觉位姿测量原理相机标定技术特征点匹配算法空间坐标系转换位姿解算精度评估系统实现与优化硬件设备选型与配置软件平台开发与集成实时数据处理与传输系统性能优化与提升应用场景与优势分析工业自动化领域应用机器人导航与定位虚拟现实与增强现实技术遥感测量与地理信息系统实验验证与案例分析实验设计及数据采集实验结果分析与评估案例应用展示与效果对比实验结论与改进方向未来发展与挑战技术创新与突破方
一种基于应变的天线副面位姿实时测量方法.pdf
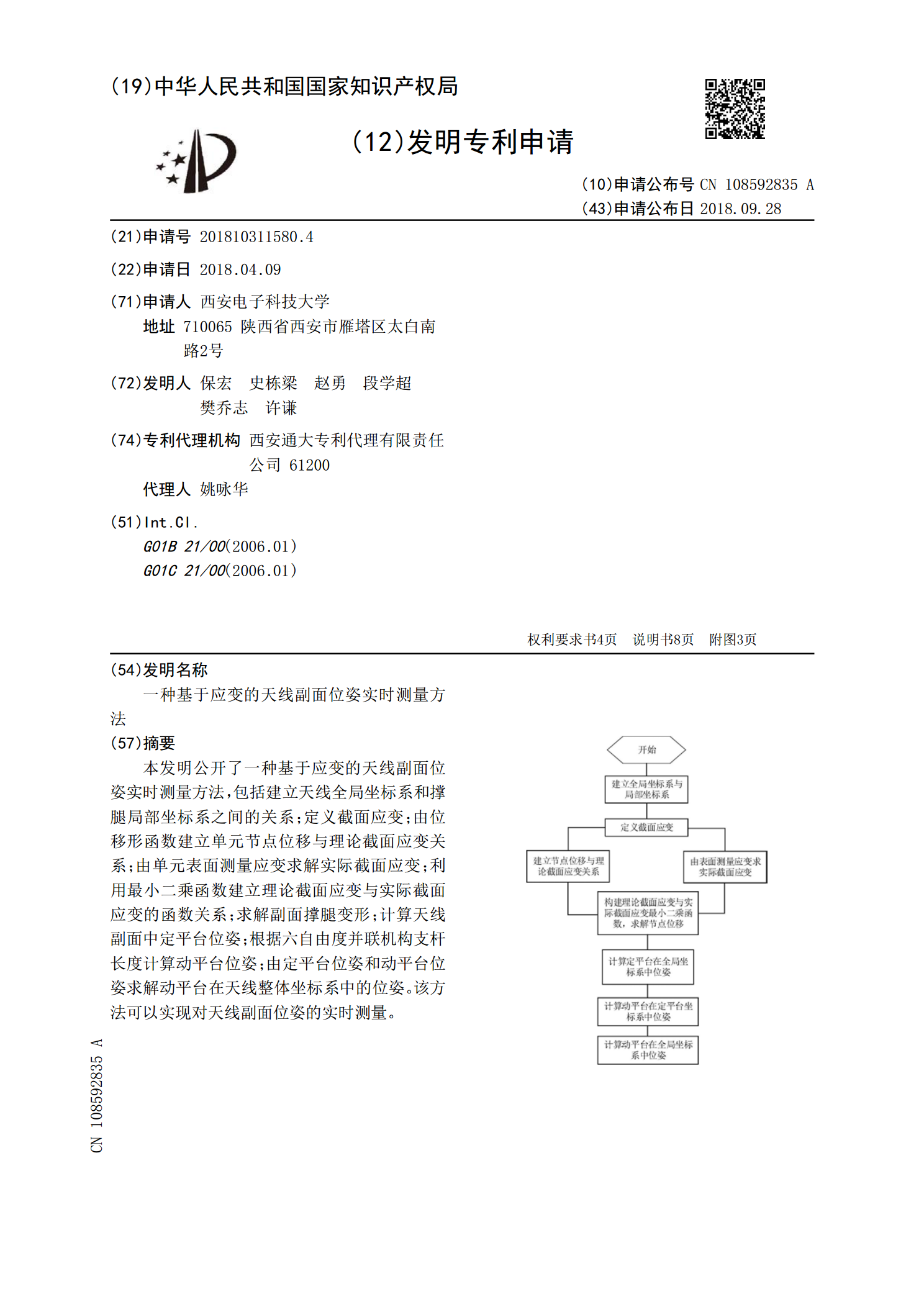
本发明公开了一种基于应变的天线副面位姿实时测量方法,包括建立天线全局坐标系和撑腿局部坐标系之间的关系;定义截面应变;由位移形函数建立单元节点位移与理论截面应变关系;由单元表面测量应变求解实际截面应变;利用最小二乘函数建立理论截面应变与实际截面应变的函数关系;求解副面撑腿变形;计算天线副面中定平台位姿;根据六自由度并联机构支杆长度计算动平台位姿;由定平台位姿和动平台位姿求解动平台在天线整体坐标系中的位姿。该方法可以实现对天线副面位姿的实时测量。

一种基于目标分割的实时跟踪方法.docx
一种基于目标分割的实时跟踪方法摘要:随着计算机视觉技术的不断发展,目标分割和实时跟踪已经成为了计算机视觉领域的重要研究方向。本文基于目标分割的实时跟踪方法进行了研究,通过对现有算法的综述和分析,提出了一种基于MaskR-CNN模型的实时目标跟踪方法。该方法能够在保证精度的同时,实现较高的实时性能,并在实际测试中得到了较好的结果。关键词:目标分割,实时跟踪,MaskR-CNN。1.引言目标分割和实时跟踪已经成为计算机视觉领域的热门研究方向,这两个问题的解决对于实际应用具有重要意义。目标分割主要是在图像或视频