
一种机械焊接用的云台机械臂及其工作方法.pdf

莉娜****ua


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机械焊接用的云台机械臂及其工作方法.pdf
本发明公开了一种机械焊接用的云台机械臂及其工作方法,包括机械臂本体,所述机械臂本体的末端连接有机械手指,所述机械手指包括连接在机械臂本体末端上的手指外壳和与机械臂本体内部转轴连接的手指转轴,所述手指转轴的末端连接有圆柱凸轮,所述手指外壳的顶部内壁和底部内壁上设置有由对称分布的导向架,所述导向架包括第一支架和第二支架,导向架上各连接有一个焊接头组件,所述焊接头组件包括分别连接在第一支架和第二支架内的第一筒体和第二筒体,所述第一筒体和第二筒体相互靠近的一端之间连接有推板。本发明可实现两个焊接位置交替进行焊接,

一种六轴云台机械臂及其工作方法.pdf
本发明公开了一种六轴云台机械臂及其工作方法,包括机械臂本体,所述机械臂本体的末端连接有机械手指,所述机械手指包括连接在机械臂本体末端上的手指外壳和与机械臂本体内部转轴连接的手指转轴,所述手指转轴上连接有主动锥形齿轮,所述手指外壳的内壁上转动连接有与主动锥形齿轮啮合连接的从动锥形齿轮,所述从动锥形齿轮的转轴上连接有凸轮板,所述凸轮板的侧面活动连接有推杆,所述手指外壳的端部嵌装有轴承板,所述轴承板的外侧连接有轴承端盖,所述轴承端盖的内部套接有连接座,所述连接座与轴承板之间连接有弹簧。本发明能够实现连接座转动和
一种自适应焊接机械臂及其工作方法.pdf
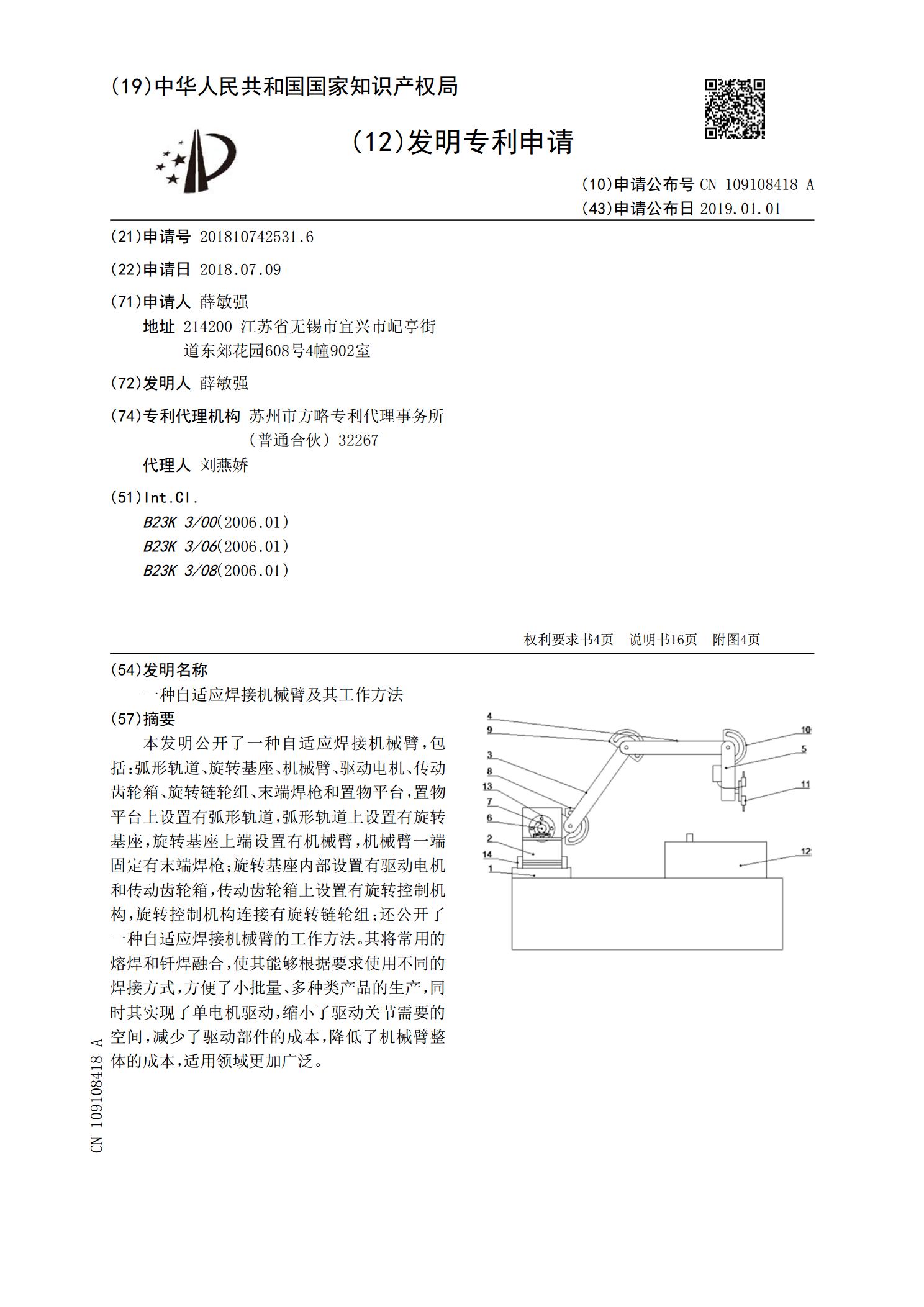
本发明公开了一种自适应焊接机械臂,包括:弧形轨道、旋转基座、机械臂、驱动电机、传动齿轮箱、旋转链轮组、末端焊枪和置物平台,置物平台上设置有弧形轨道,弧形轨道上设置有旋转基座,旋转基座上端设置有机械臂,机械臂一端固定有末端焊枪;旋转基座内部设置有驱动电机和传动齿轮箱,传动齿轮箱上设置有旋转控制机构,旋转控制机构连接有旋转链轮组;还公开了一种自适应焊接机械臂的工作方法。其将常用的熔焊和钎焊融合,使其能够根据要求使用不同的焊接方式,方便了小批量、多种类产品的生产,同时其实现了单电机驱动,缩小了驱动关节需要的空间

一种机械臂及其工作方法.pdf
本发明涉及码垛机械领域,具体的说是一种机械臂以及工作方法,包括底座、一号横向转动关节、一号纵向转动关节、二号纵向转动关节、二号横向转动关节、连接末端和制动控制装置。制动控制装置设置在一号横向转动关节上,制动控制装置包括制动片、制动电机、变速器、主动齿轮、转轴和滚柱;制动片的固定在一号纵向转动关节上;制动电机固定在其下方的一号横向转动关节上,制动电机通过变速器与主动齿轮联接;转轴设置在一号横向转动关节上并与其旋转连接;滚柱设置在转轴上。本发明在机械臂之间安装制动控制装置,通过改变机械臂之间的摩擦方式来控制机

机械臂及其工作方法.pdf
本发明的机械臂及其工作方法中,机械臂包括连杆机构、柔性传动机构、连接器和驱动装置,连杆机构包括连接的固定杆、连杆和两驱动杆,四根杆连接线组成平行四边形;柔性传动机构包括通过柔性结构连接且直径相等的主、从驱动轮和直径相等的两传动轮;主驱动轮位于固定杆与驱动杆的连接点处,并在驱动装置驱动下与驱动杆同步转动,从驱动轮与连杆连接,且连接点位于两驱动杆与连杆连接点的连线上,两传动轮分别位于驱动杆与固定杆和连杆的连接点处,柔性结构通过两传动轮,且分别与两传动轮之间形成有一包覆角,两包覆角在变动值数值上相等;连接器与从