
一种海底矿石勘探车及其采集矿石方法.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种海底矿石勘探车及其采集矿石方法.pdf
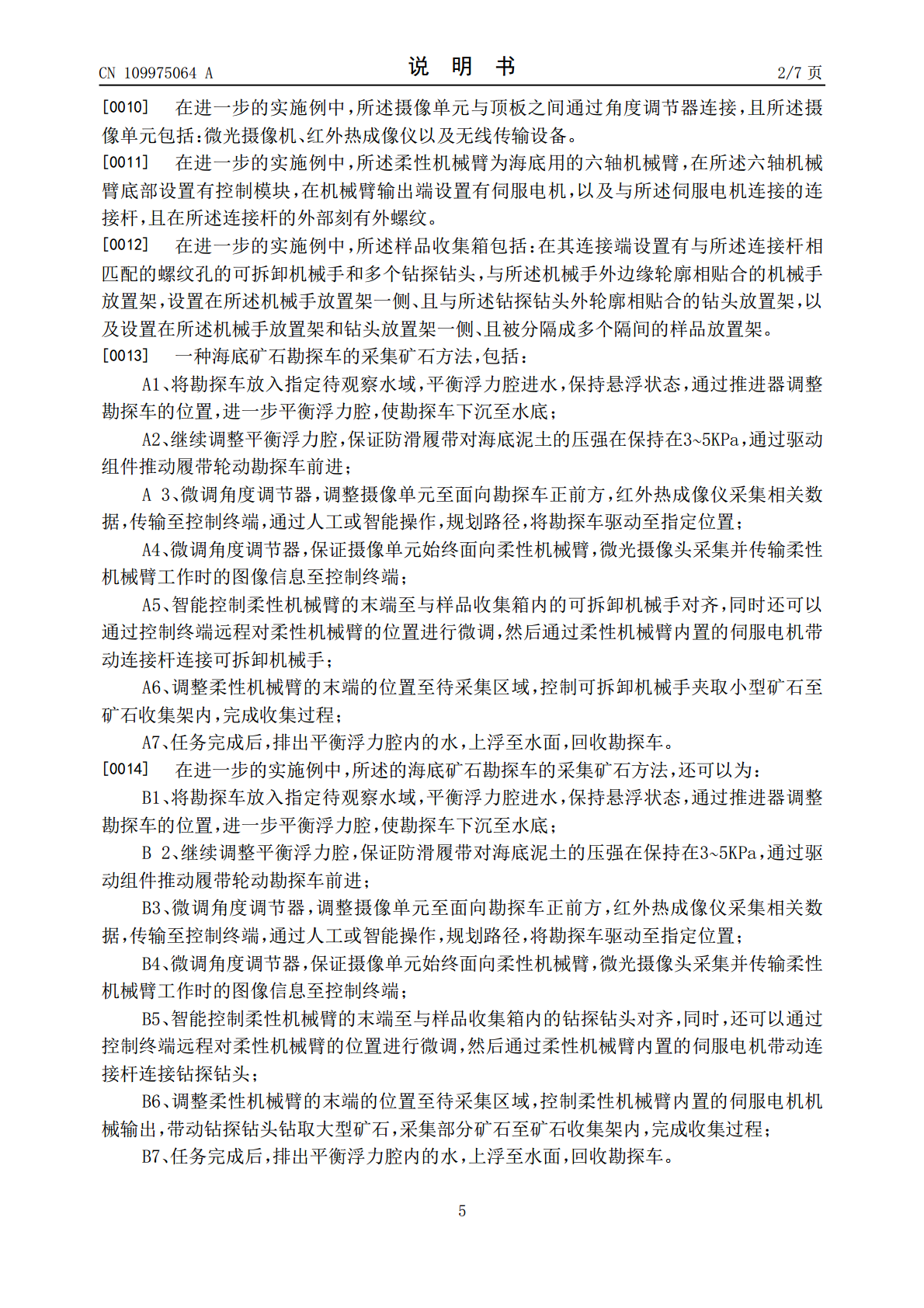
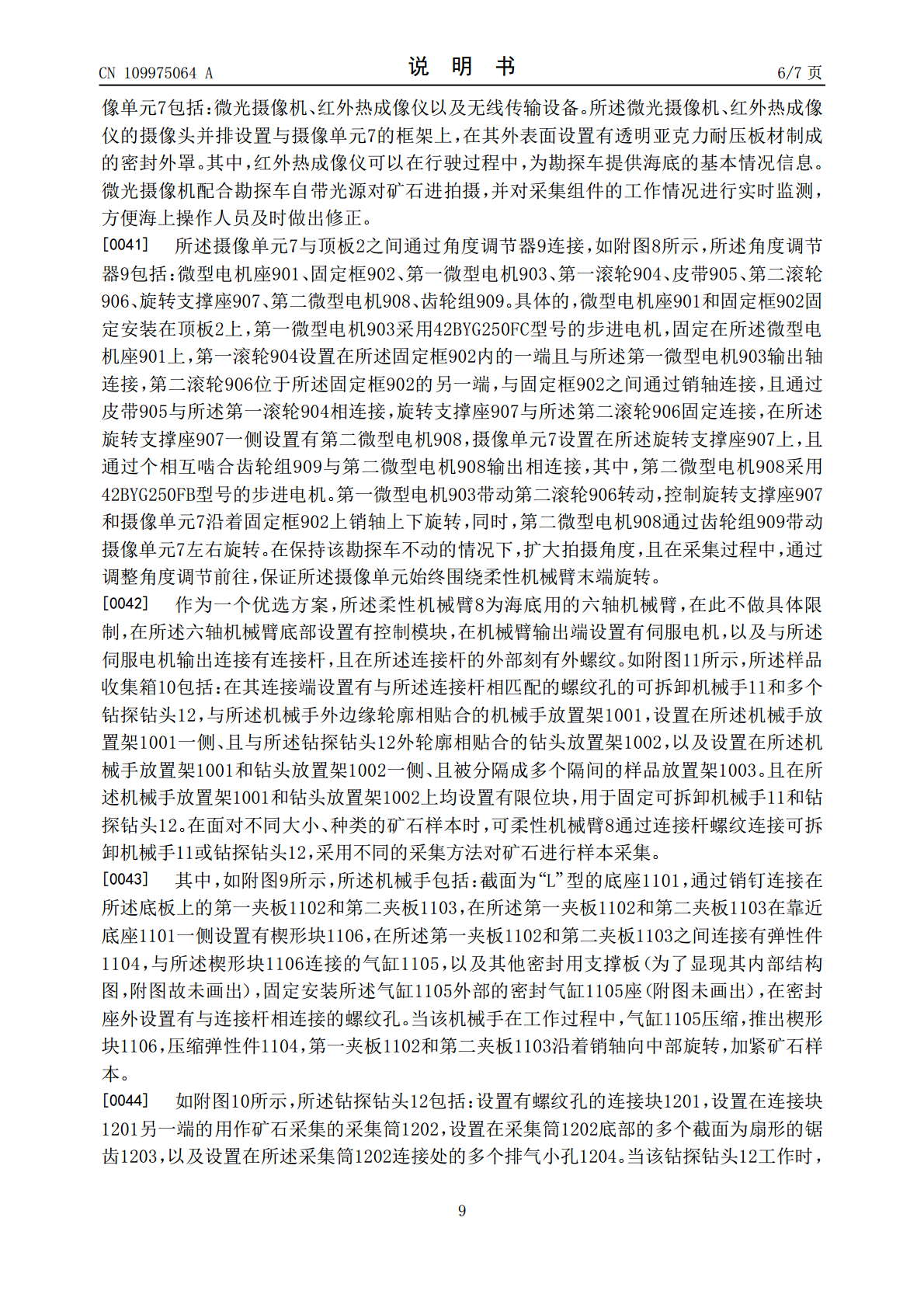
本发明公开了一种海底矿石勘探车及其采集矿石方法,属于海底工程领域。包括基础组件、重力调节组件、推进组件和采集组件四部分。其中,重力调节组件包括两个平衡浮力腔,设置在两个平衡浮力腔之间的平衡检测器;推进组件包括设置在平衡浮力腔中间的推进器,设置在防水壳体外部的多个履带轮;采集组件包括设置在顶板上的摄像单元和柔性机械臂,以及设置在顶板上的样品收集箱。本发明通过使用橡胶履带代替传统刚性履带或滚轮,以及通过平衡浮力腔调整勘探车重力,精准控制履带与海泥之间的压力和压强,减小勘探车受到海泥的影响;通过设置可拆卸的机械
便于收纳的海底矿石采集设备.pdf
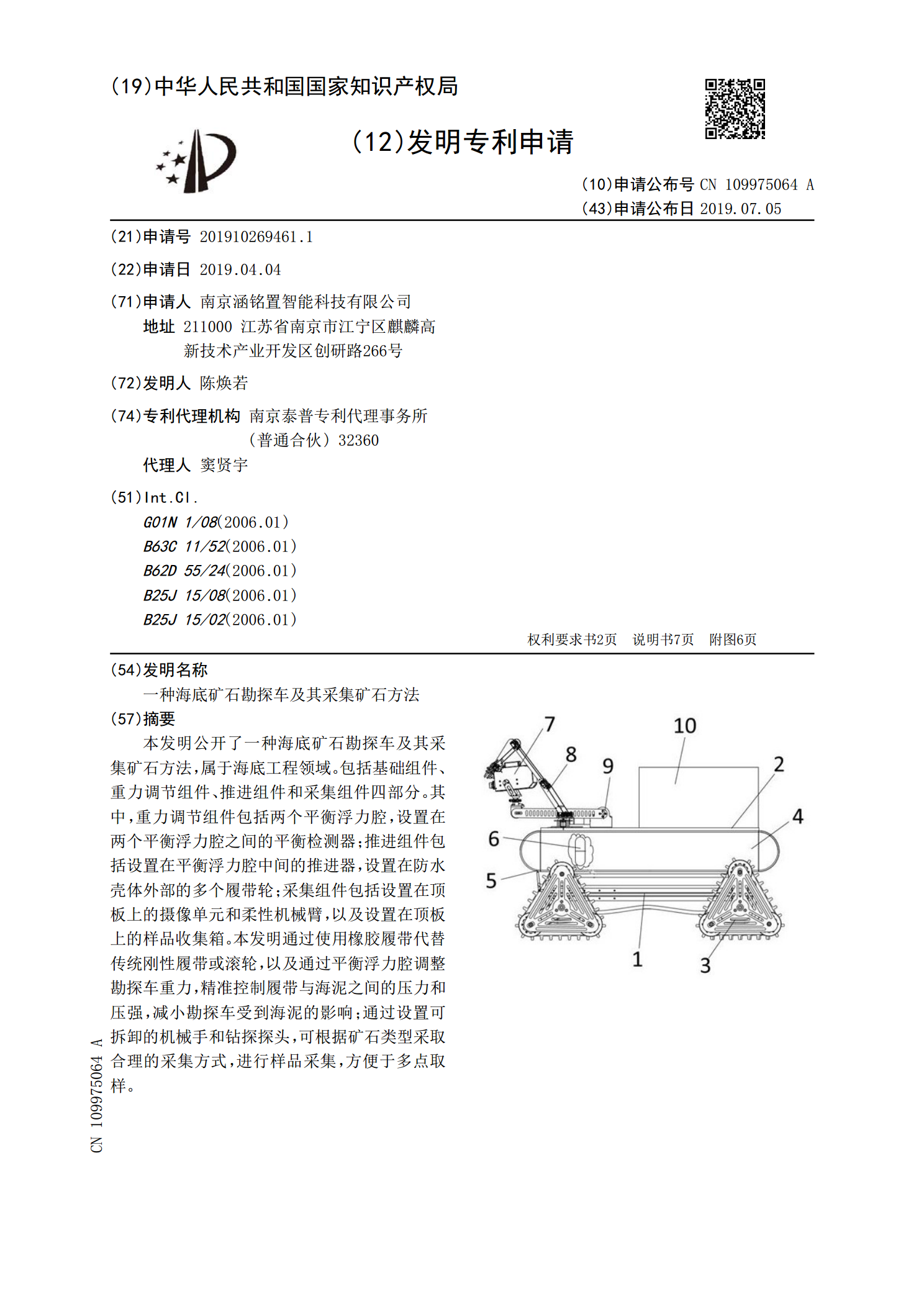
本发明公开了一种便于收纳的海底矿石采集设备,包括破碎机构、采集机构及收纳机构,所述收纳机构包括箱体,所述箱体底部设有驱动机构,所述驱动机构包括旋转装置、多个导向轮组及第二壳体;通过上述驱动机构的设置,使得该装置可以实现自由转动和自由移动的效果,可以通过岸上人员的控制,自由的在海底进行移动和探测,提高了自由度,使得海底矿石的探测更加的灵活简单,上述机构的设置,可以360°旋转探测周围的海底矿石,且可以移动至其他位置对探测海底矿石,以便于进行采集收纳,增加了该装置的探测范围,提高了矿石采集的效率,十分的实用。
一种用于矿石开采的矿石运输车.pdf
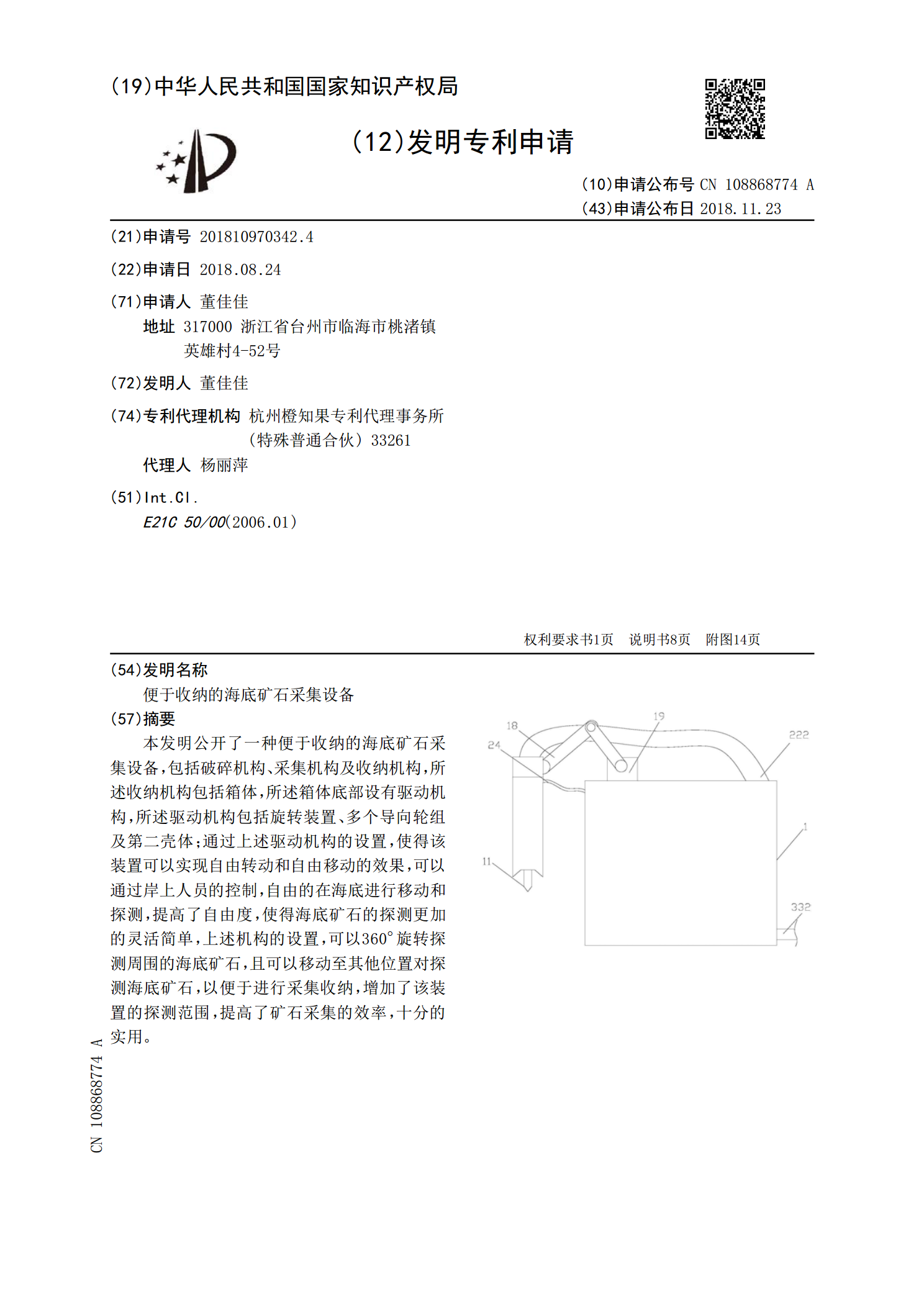
本发明公开了一种用于矿石开采的矿石运输车,包括轨道和固定底板,其特征在于,固定底板下方固定连接有导轮,所述导轮外侧开设有卡槽,卡槽与轨道相配合,固定底板上方右侧固定连接有转动铰链,转动铰链上方固定连接有倾斜连板,固定底板上方左侧固定连接有撑杆,液压撑杆上端与倾斜连板固定连接;所述倾斜连板上方左右两侧对称固定连接有支撑架,支撑架顶部固定连接有运料斗,运料斗左侧固定连接有电机座。与现有技术相比,本发明的有益效果是:本发明结构简单,使用方便,用于矿石的运输,能够避免矿石运输时矿石表面存在黏土进而粘附与运输车内的
一种工业矿石采集破碎装置.pdf
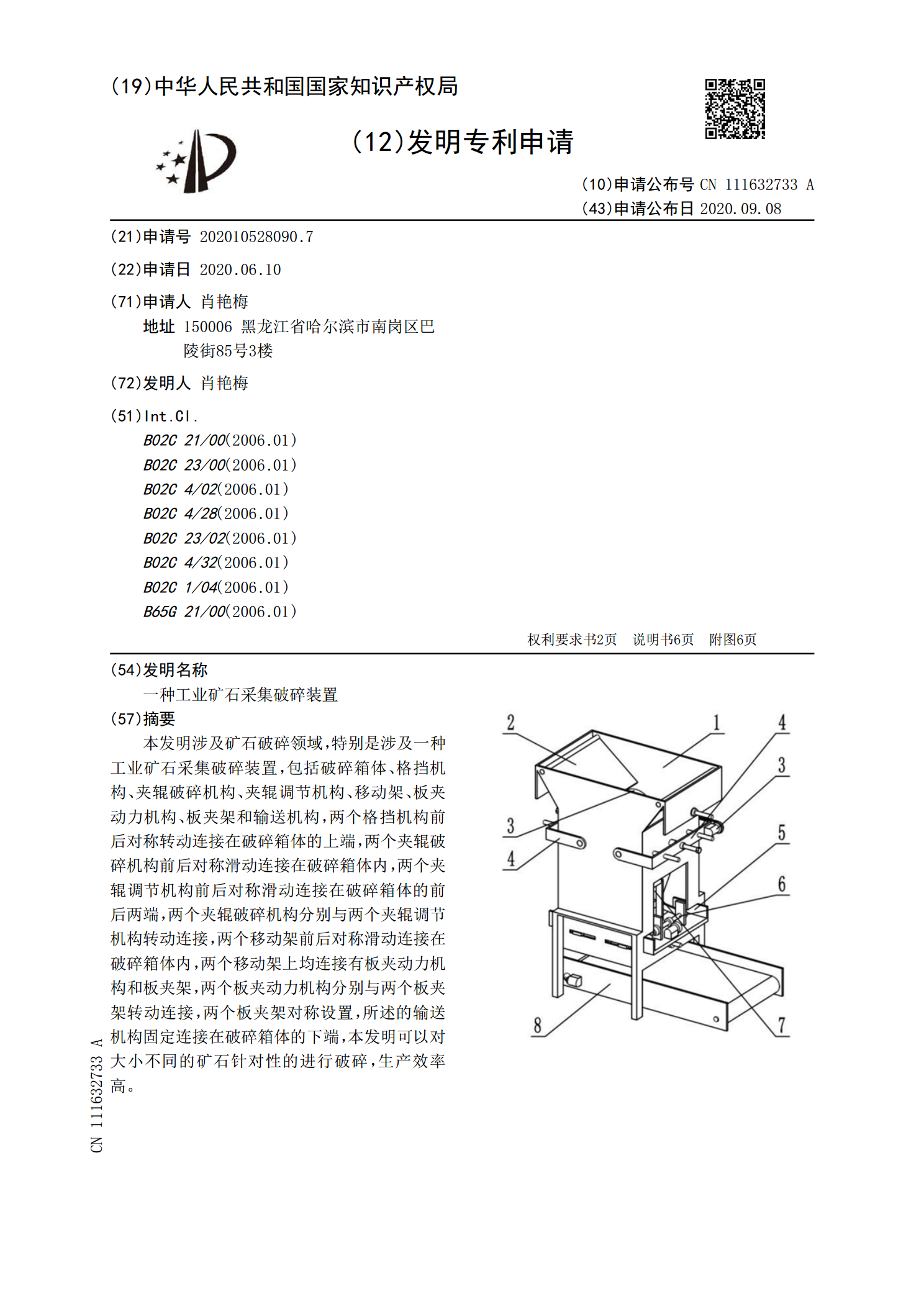
本发明涉及矿石破碎领域,特别是涉及一种工业矿石采集破碎装置,包括破碎箱体、格挡机构、夹辊破碎机构、夹辊调节机构、移动架、板夹动力机构、板夹架和输送机构,两个格挡机构前后对称转动连接在破碎箱体的上端,两个夹辊破碎机构前后对称滑动连接在破碎箱体内,两个夹辊调节机构前后对称滑动连接在破碎箱体的前后两端,两个夹辊破碎机构分别与两个夹辊调节机构转动连接,两个移动架前后对称滑动连接在破碎箱体内,两个移动架上均连接有板夹动力机构和板夹架,两个板夹动力机构分别与两个板夹架转动连接,两个板夹架对称设置,所述的输送机构固定连

一种矿石冶炼装置及其冶炼方法.pdf
本发明提供了一种矿石冶炼装置及其冶炼方法,矿石、还原剂、熔剂混合物料在还原装置内还原矿石中有价金属,还原装置出料的DRI球团通过热送装置进入熔炼造气炉,通过喷吹口向熔炼造气炉内喷入煤粉及富氧空气并发生反应,反应产生的高温辐射融化DRI球团实现渣铁分离,熔炼造气炉产生高热值煤气经煤气处理系统处理后供还原装置使用。本发明通过控制配碳量、还原温度和还原时间,在还原装置内还原矿石,还原装置出料DRI进入熔炼造气炉直接熔炼,熔炼造气炉内不存在料柱结构,不需要使用焦炭,同时熔炼造气熔能够产生高热值煤气供还原装置使用,