
图像虚化方法、装置、存储介质及电子设备.pdf

韶敏****ab

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像虚化方法、装置、存储介质及电子设备.pdf
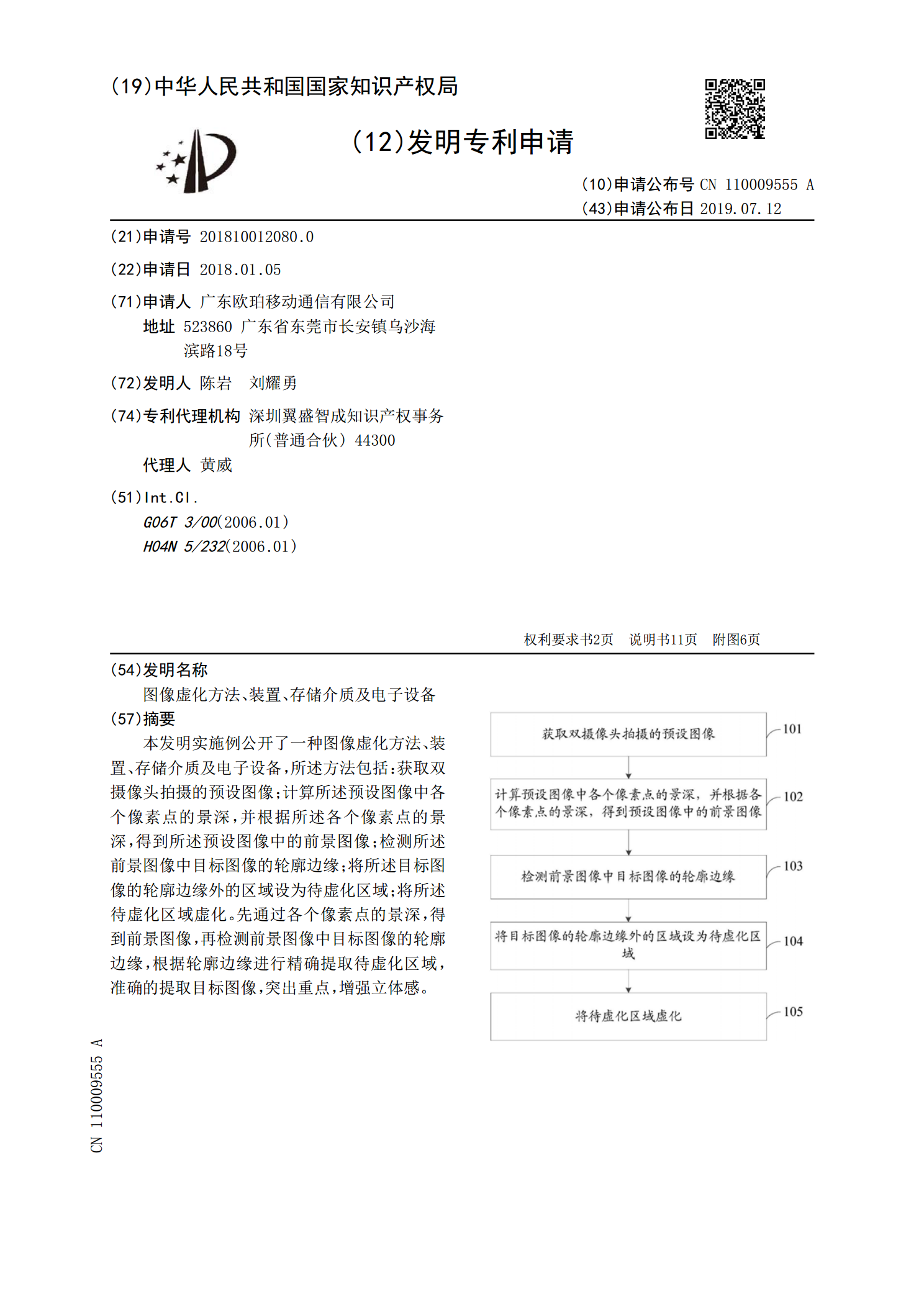
本发明实施例公开了一种图像虚化方法、装置、存储介质及电子设备,所述方法包括:获取双摄像头拍摄的预设图像;计算所述预设图像中各个像素点的景深,并根据所述各个像素点的景深,得到所述预设图像中的前景图像;检测所述前景图像中目标图像的轮廓边缘;将所述目标图像的轮廓边缘外的区域设为待虚化区域;将所述待虚化区域虚化。先通过各个像素点的景深,得到前景图像,再检测前景图像中目标图像的轮廓边缘,根据轮廓边缘进行精确提取待虚化区域,准确的提取目标图像,突出重点,增强立体感。
图像背景虚化方法、装置、存储介质及电子设备.pdf
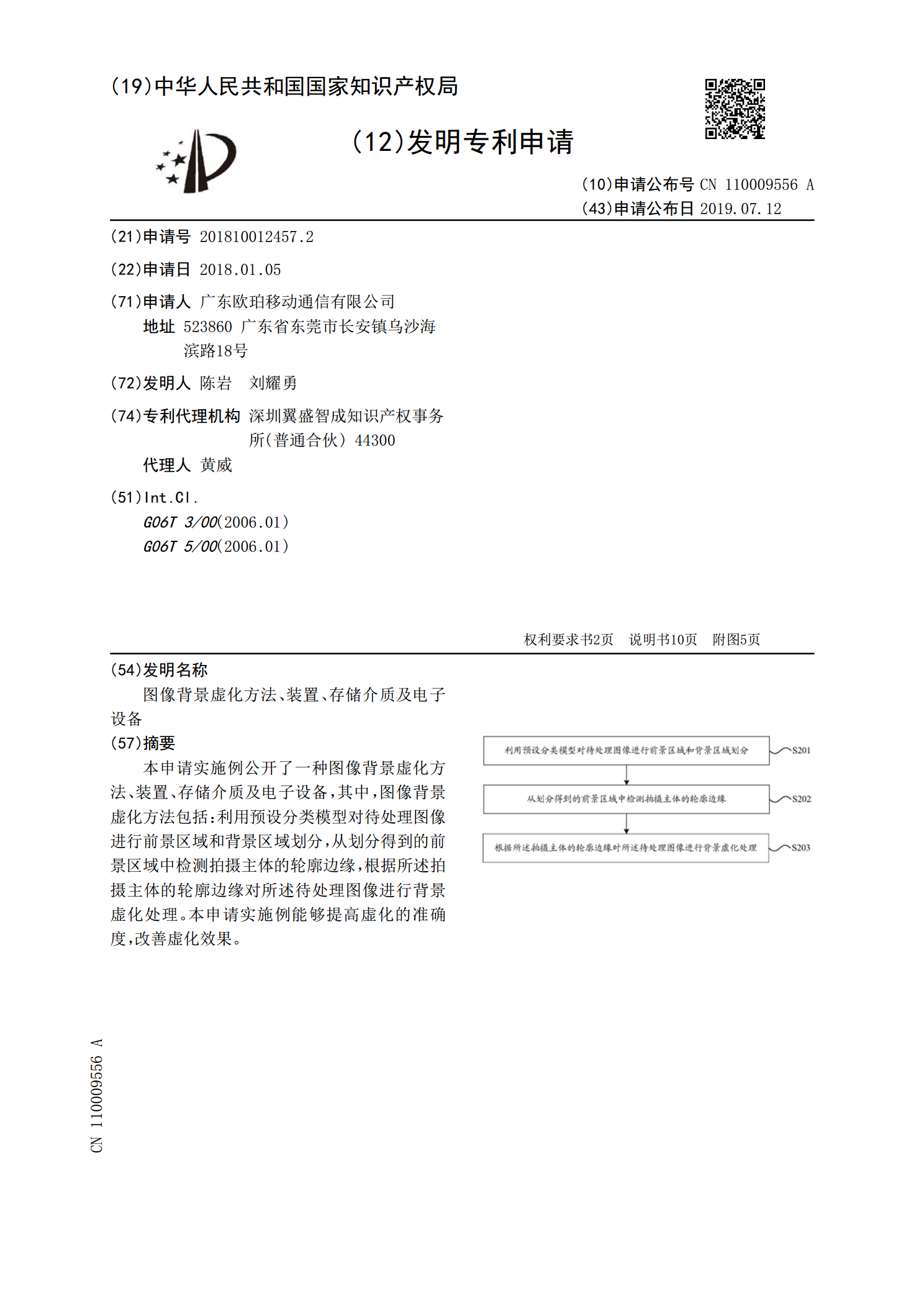
本申请实施例公开了一种图像背景虚化方法、装置、存储介质及电子设备,其中,图像背景虚化方法包括:利用预设分类模型对待处理图像进行前景区域和背景区域划分,从划分得到的前景区域中检测拍摄主体的轮廓边缘,根据所述拍摄主体的轮廓边缘对所述待处理图像进行背景虚化处理。本申请实施例能够提高虚化的准确度,改善虚化效果。

图像处理和虚化方法、装置、电子设备及存储介质.pdf
本申请实施例提供了图像处理和图像虚化方法、装置、电子设备及存储介质,图像处理方法包括:对由第一摄像头采集的第一图像和第二摄像头采集的第二图像进行立体匹配得到视差图;对第一图像进行语义边缘检测,以确定第一图像中的语义边缘区域和非语义边缘区域;基于所述第一图像中的像素的梯度、语义边缘区域和非语义边缘区域,对视差图进行保边平滑滤波处理。
图像虚化方法、装置及电子设备.pdf
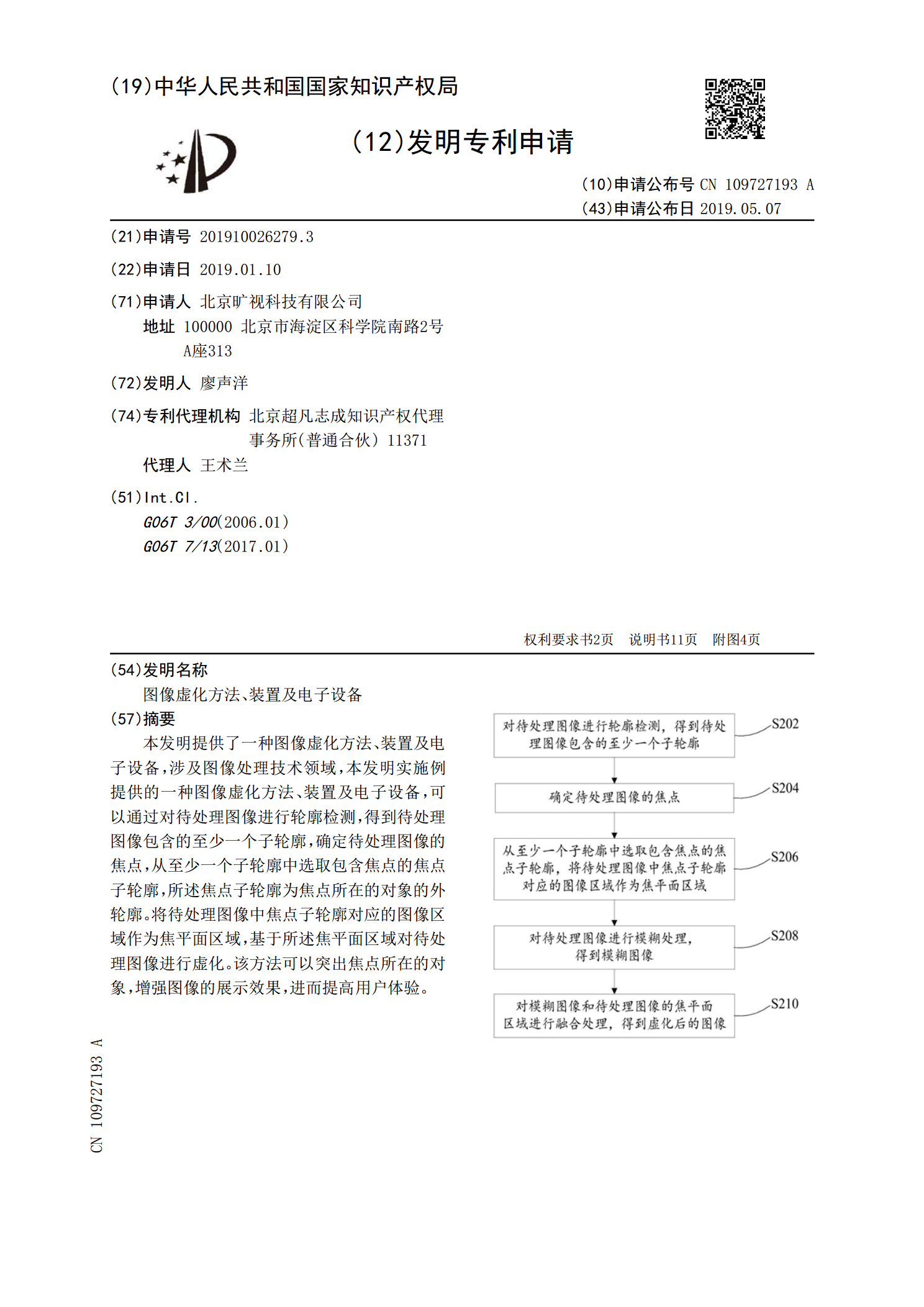
本发明提供了一种图像虚化方法、装置及电子设备,涉及图像处理技术领域,本发明实施例提供的一种图像虚化方法、装置及电子设备,可以通过对待处理图像进行轮廓检测,得到待处理图像包含的至少一个子轮廓,确定待处理图像的焦点,从至少一个子轮廓中选取包含焦点的焦点子轮廓,所述焦点子轮廓为焦点所在的对象的外轮廓。将待处理图像中焦点子轮廓对应的图像区域作为焦平面区域,基于所述焦平面区域对待处理图像进行虚化。该方法可以突出焦点所在的对象,增强图像的展示效果,进而提高用户体验。

图像处理的方法、装置、电子设备及存储介质.pdf
本公开实施例提供一种图像处理方法、装置、电子设备及存储介质;方法包括:获取在图像预览的过程中采集到的原始图像帧;对所述原始图像帧执行特效渲染操作以得到特效图像帧,并在显示区域执行所述特效图像帧的绘制操作;检测在图像预览的过程中呈现所述原始图像帧的预览帧率、以及显示区域中呈现所述特效图像帧的绘制帧率;基于所述绘制帧率和所述预览帧率之间的差值,控制所述图像预览的过程中用于采集新的原始图像帧的分辨率。本公开能够使特效处理过程中分辨率和帧率的智能化平衡。