
一种仿河狸的腿部划水装置.pdf

是立****92


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿河狸的腿部划水装置.pdf
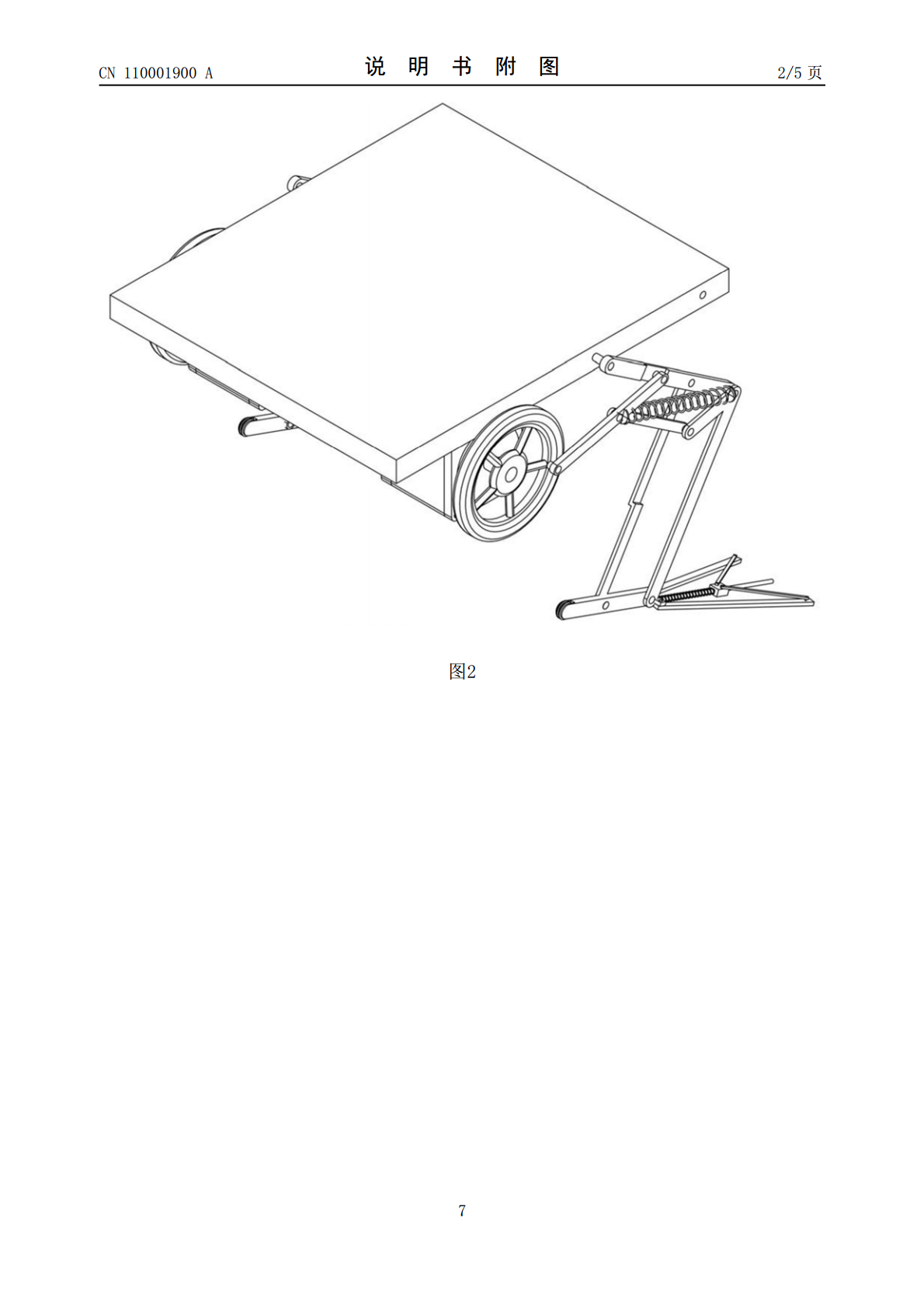
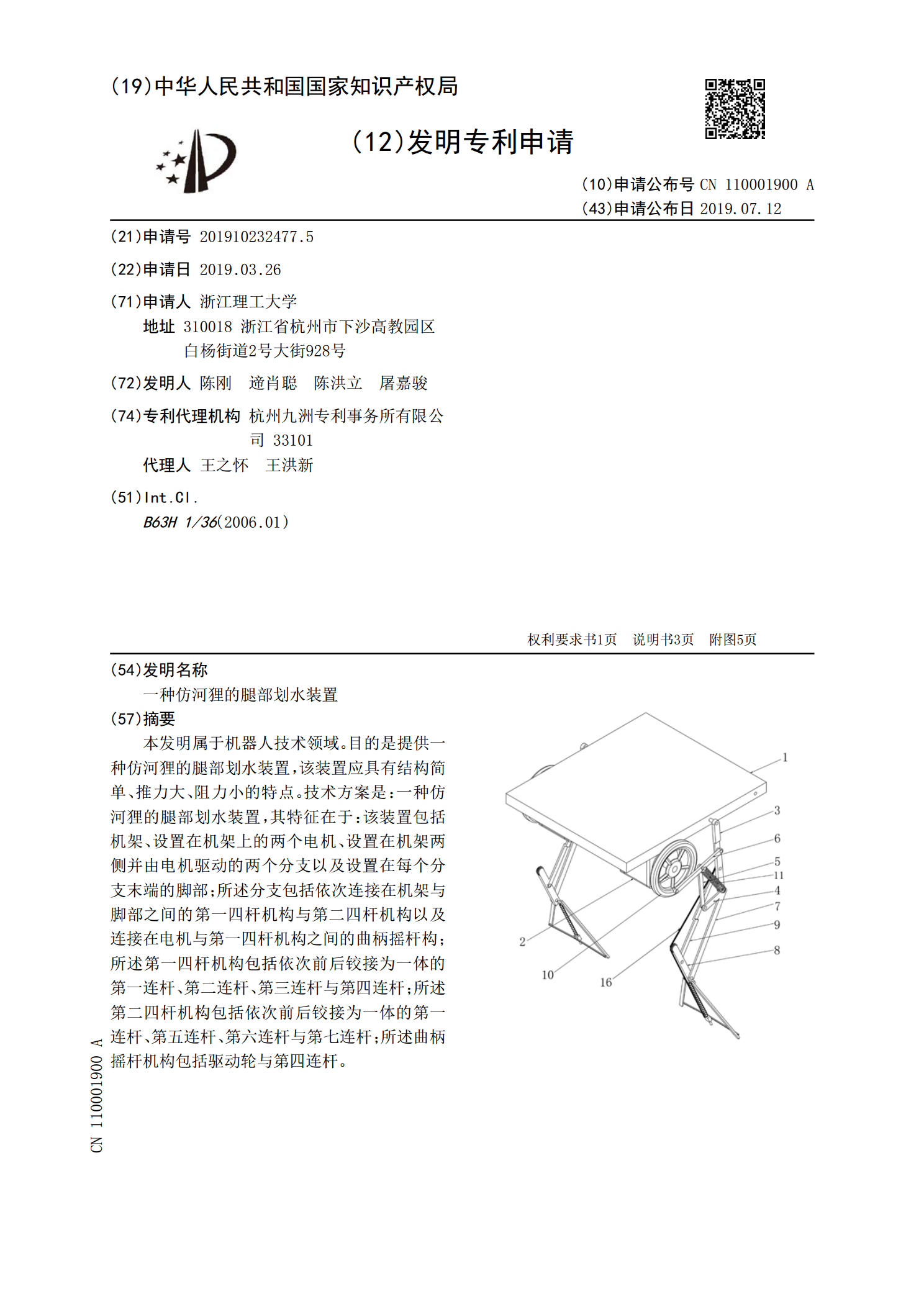
本发明属于机器人技术领域。目的是提供一种仿河狸的腿部划水装置,该装置应具有结构简单、推力大、阻力小的特点。技术方案是:一种仿河狸的腿部划水装置,其特征在于:该装置包括机架、设置在机架上的两个电机、设置在机架两侧并由电机驱动的两个分支以及设置在每个分支末端的脚部;所述分支包括依次连接在机架与脚部之间的第一四杆机构与第二四杆机构以及连接在电机与第一四杆机构之间的曲柄摇杆构;所述第一四杆机构包括依次前后铰接为一体的第一连杆、第二连杆、第三连杆与第四连杆;所述第二四杆机构包括依次前后铰接为一体的第一连杆、第五连杆
一种仿河狸尾部摆动的推进装置.pdf
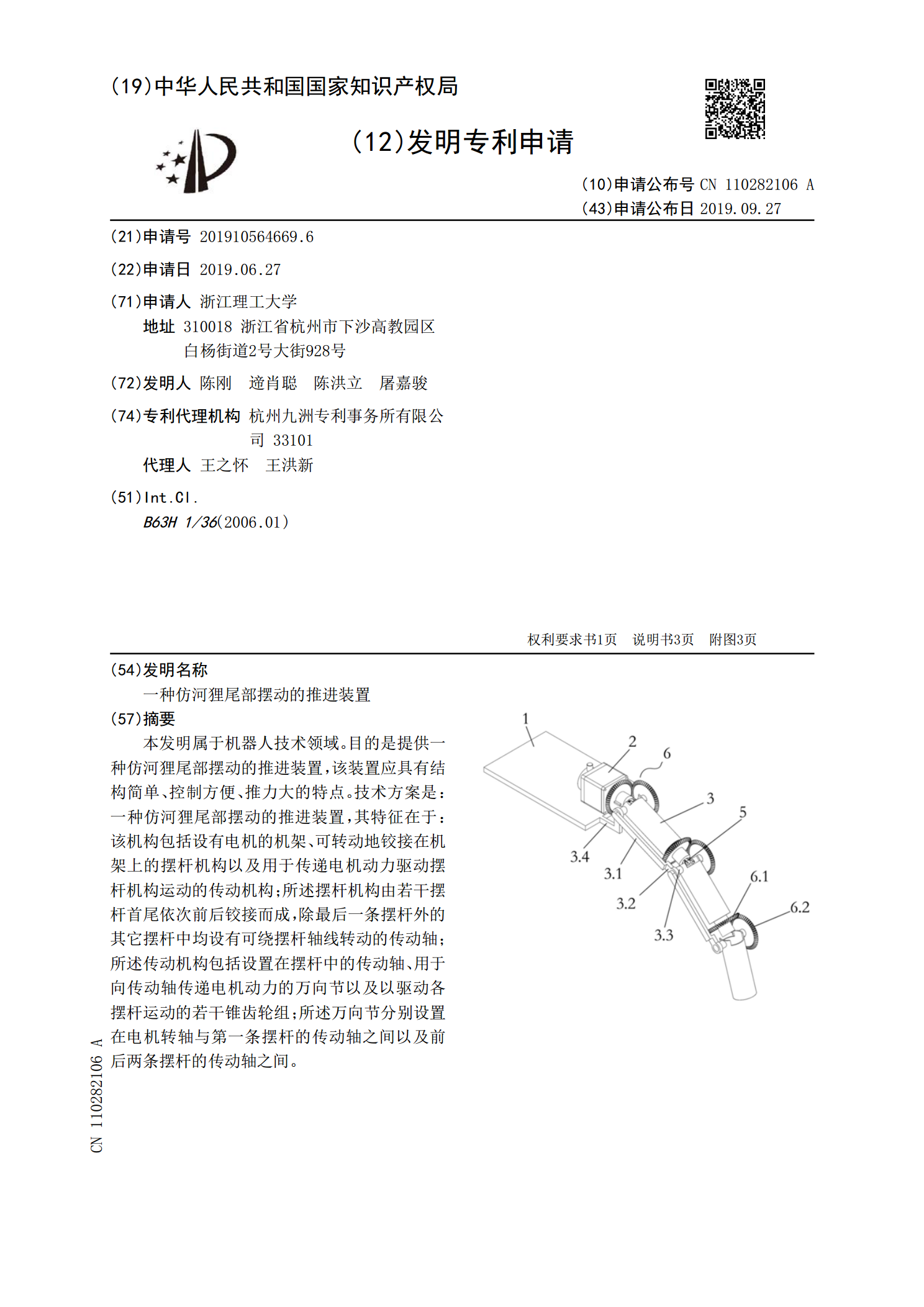
本发明属于机器人技术领域。目的是提供一种仿河狸尾部摆动的推进装置,该装置应具有结构简单、控制方便、推力大的特点。技术方案是:一种仿河狸尾部摆动的推进装置,其特征在于:该机构包括设有电机的机架、可转动地铰接在机架上的摆杆机构以及用于传递电机动力驱动摆杆机构运动的传动机构;所述摆杆机构由若干摆杆首尾依次前后铰接而成,除最后一条摆杆外的其它摆杆中均设有可绕摆杆轴线转动的传动轴;所述传动机构包括设置在摆杆中的传动轴、用于向传动轴传递电机动力的万向节以及以驱动各摆杆运动的若干锥齿轮组;所述万向节分别设置在电机转轴与

腿部打水;手臂划水.ppt
自由泳教学教学目标腿部动作分析手臂动作分析划水:划水是整个臂部动作产生推进力的主要环节。在抱水的基础上,划水时臂与水面约成35-45度角。划水时采用屈臂划水,屈臂的程度可根据自己的身体条件而定:臂长、臂力弱的可以屈臂程度大些,反之则可以屈臂程度小些。开始划水时,屈肘约为100-120度左右。此时前动快于上臂,当划至肩下垂直面时,屈肘90-120度角。前臂迅速向后推水至侧腿旁,结束划水。在划水过程中,手掌凹。划水的路线:划水时,手先向身体的中轴移动,划到胸腹部下方时转向体侧划动。出水:划水结束后,臂借助推水

腿部打水;手臂划水.ppt

腿部打水;手臂划水.pptx
五步拳教学起式弓步冲拳弹踢冲拳马步架打歇步盖打提膝穿掌仆步穿掌虚步挑掌收式