
一种仿河狸尾部摆动的推进装置.pdf

一条****轩吗

1/8

2/8

3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿河狸尾部摆动的推进装置.pdf
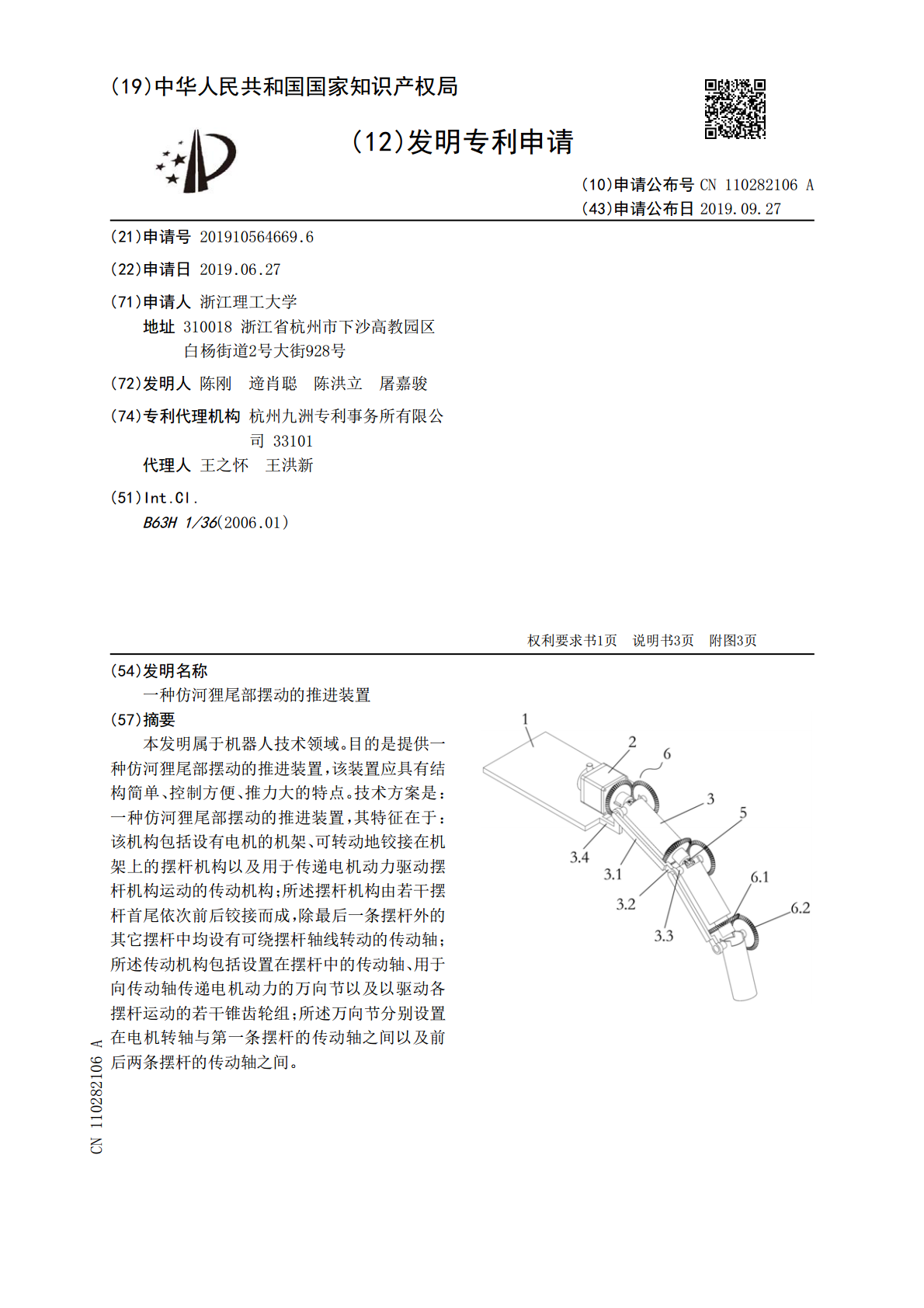
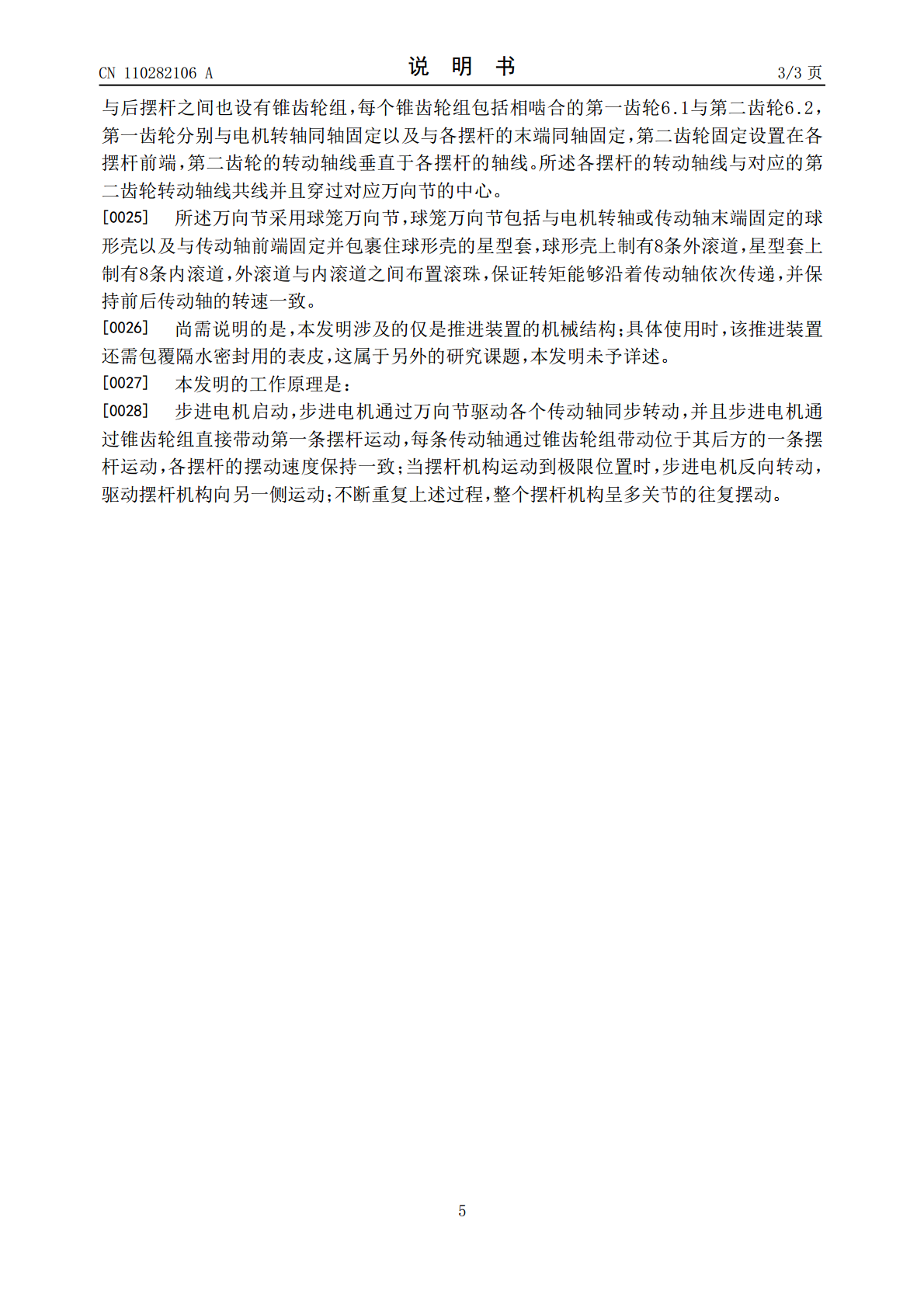
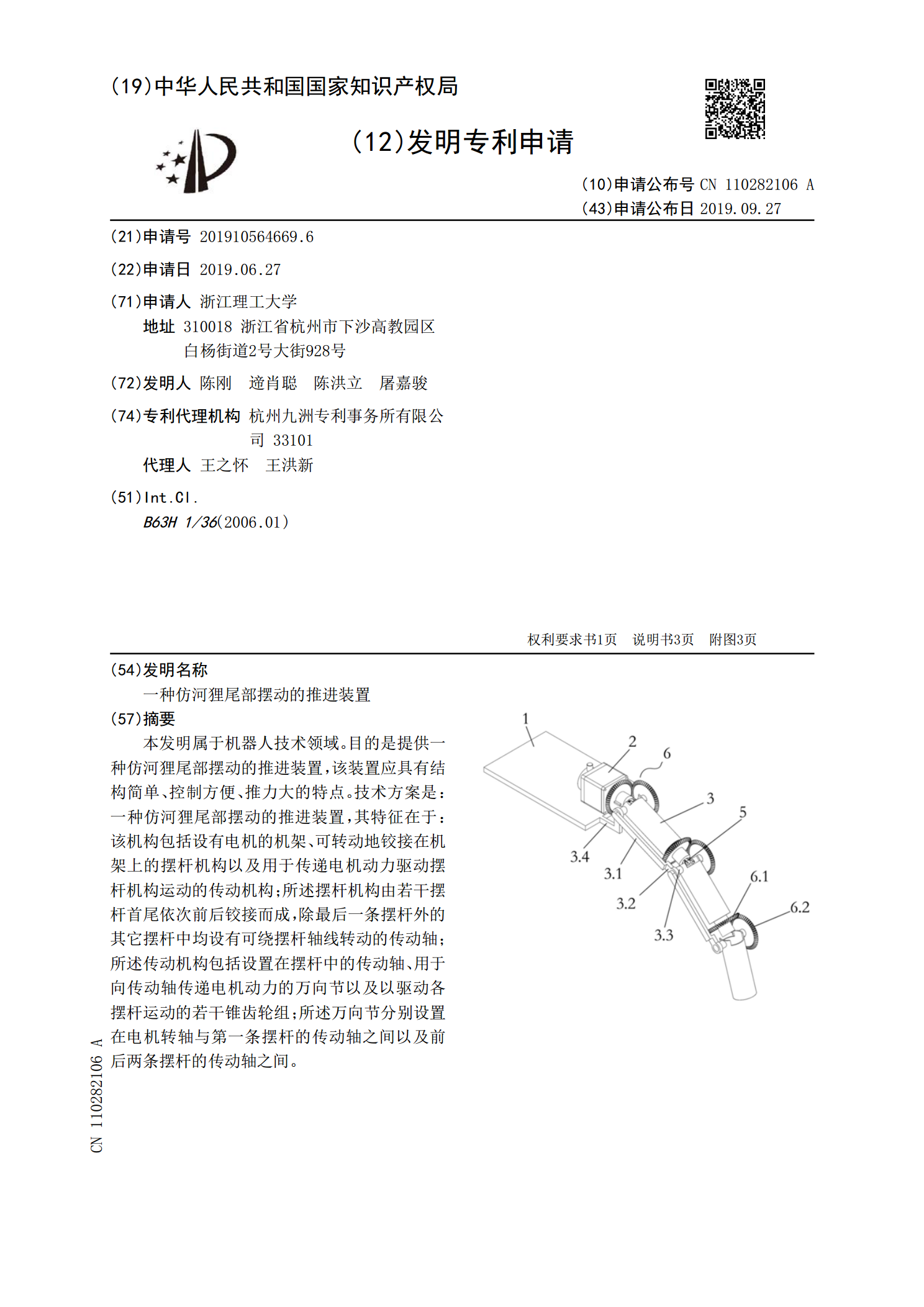
本发明属于机器人技术领域。目的是提供一种仿河狸尾部摆动的推进装置,该装置应具有结构简单、控制方便、推力大的特点。技术方案是:一种仿河狸尾部摆动的推进装置,其特征在于:该机构包括设有电机的机架、可转动地铰接在机架上的摆杆机构以及用于传递电机动力驱动摆杆机构运动的传动机构;所述摆杆机构由若干摆杆首尾依次前后铰接而成,除最后一条摆杆外的其它摆杆中均设有可绕摆杆轴线转动的传动轴;所述传动机构包括设置在摆杆中的传动轴、用于向传动轴传递电机动力的万向节以及以驱动各摆杆运动的若干锥齿轮组;所述万向节分别设置在电机转轴与
一种仿河狸尾巴的摆动机构.pdf
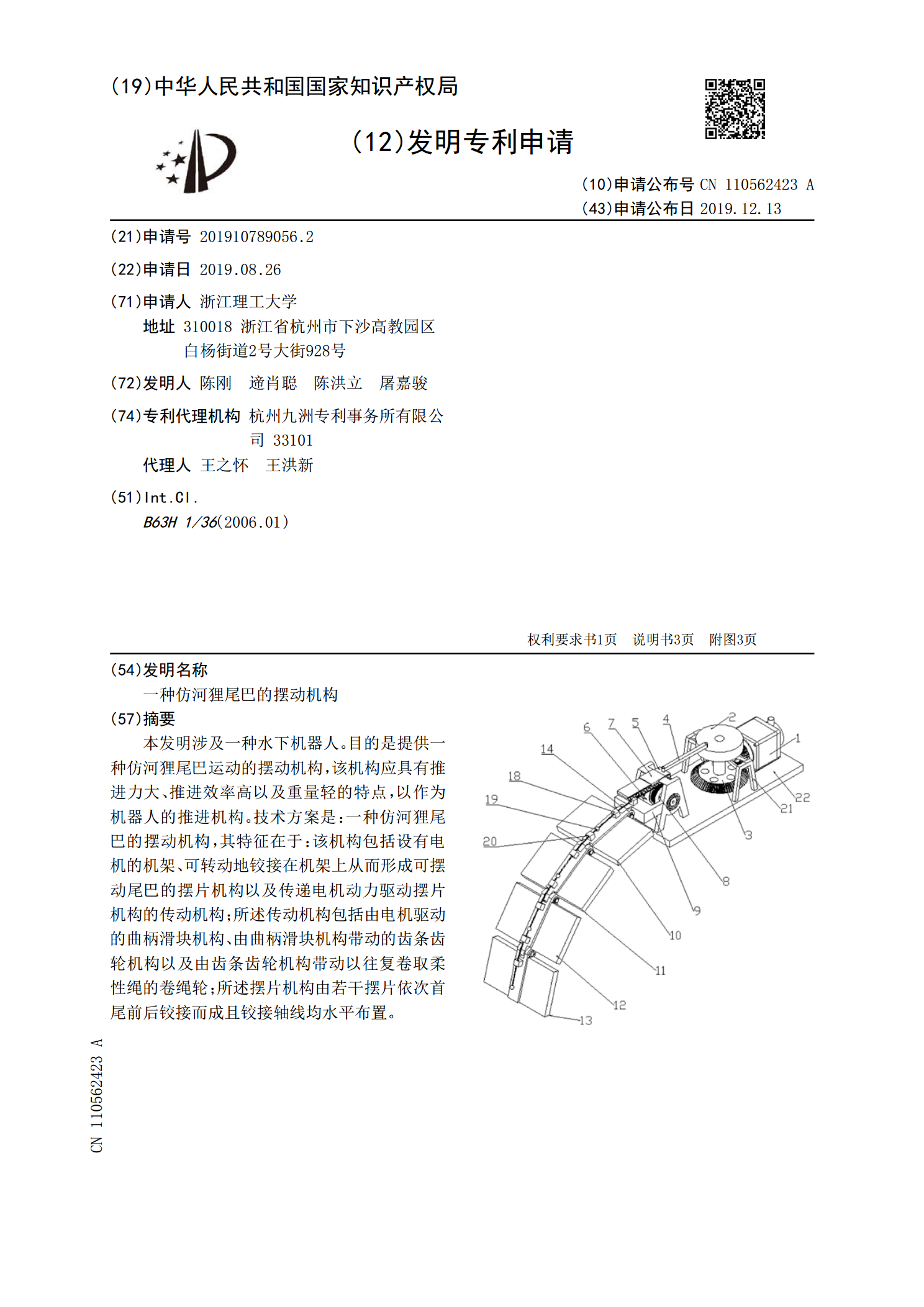
本发明涉及一种水下机器人。目的是提供一种仿河狸尾巴运动的摆动机构,该机构应具有推进力大、推进效率高以及重量轻的特点,以作为机器人的推进机构。技术方案是:一种仿河狸尾巴的摆动机构,其特征在于:该机构包括设有电机的机架、可转动地铰接在机架上从而形成可摆动尾巴的摆片机构以及传递电机动力驱动摆片机构的传动机构;所述传动机构包括由电机驱动的曲柄滑块机构、由曲柄滑块机构带动的齿条齿轮机构以及由齿条齿轮机构带动以往复卷取柔性绳的卷绳轮;所述摆片机构由若干摆片依次首尾前后铰接而成且铰接轴线均水平布置。
一种仿河狸的腿部划水装置.pdf
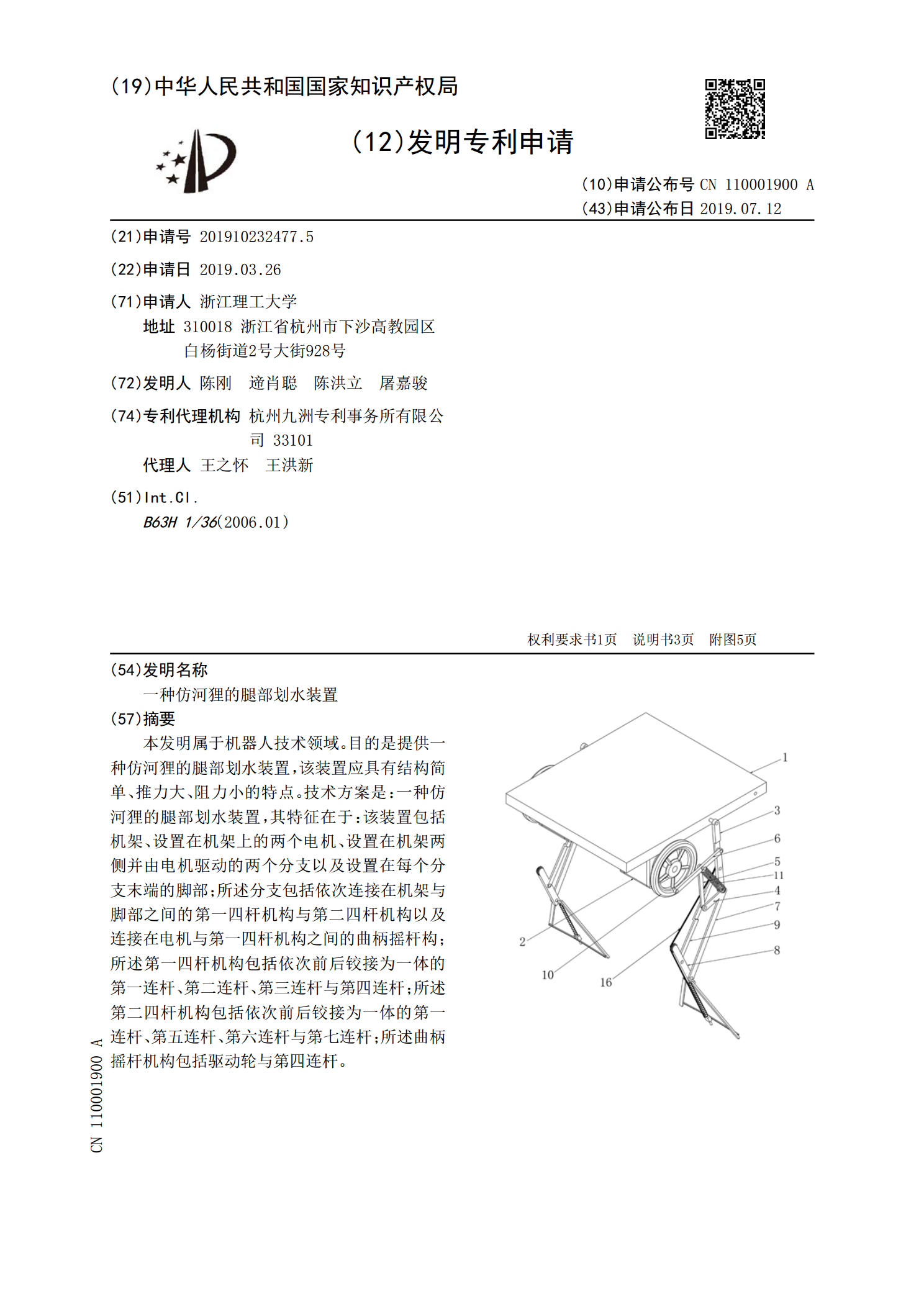
本发明属于机器人技术领域。目的是提供一种仿河狸的腿部划水装置,该装置应具有结构简单、推力大、阻力小的特点。技术方案是:一种仿河狸的腿部划水装置,其特征在于:该装置包括机架、设置在机架上的两个电机、设置在机架两侧并由电机驱动的两个分支以及设置在每个分支末端的脚部;所述分支包括依次连接在机架与脚部之间的第一四杆机构与第二四杆机构以及连接在电机与第一四杆机构之间的曲柄摇杆构;所述第一四杆机构包括依次前后铰接为一体的第一连杆、第二连杆、第三连杆与第四连杆;所述第二四杆机构包括依次前后铰接为一体的第一连杆、第五连杆

一种仿鲸鱼尾的摆动装置.pdf
本发明属于机器人技术领域。目的是提供一种仿鲸鱼尾的摆动装置,该装置应具有结构简单、推力大、阻力小的特点。技术方案是:一种仿鲸鱼尾的摆动装置,其特征在于:该装置包括电机、尾鳍以及用于依次传递电机动力以驱动尾鳍摆动的锥齿轮组、曲柄摇杆机构与齿轮齿条机构;所述锥齿轮组包括与电机输出轴固定的第一锥齿轮以及可转动地定位在底座上并与第一锥齿轮啮合的第二锥齿轮;所述齿轮齿条机构包括可转动地定位在底座上的齿轮以及可滑动地定位在底座上并与齿轮啮合的齿条;所述曲柄摇杆机构包括与第二锥齿轮同轴固定的曲柄以及两端分别可转动地铰接

一种除雪装置仿地面摆动机构.pdf
本实用新型涉及一种除雪装置仿地面摆动机构。包括前部连接架(1)和后部底盘连接架(5),所述前部连接架(1)和所述后部底盘连接架(5)通过关节轴承(4)实现连接,使所述前部连接架(1)和所述后部底盘连接架(5)产生相对摆动。本实用新型与目前使用的摆动机构相比,所使用的仿地面摆动机构前部连接架与工作装置在仿地面作业过程中,通过关节轴承连接来产生与后部底盘连接架的相对摆动,相比于直接主轴连接更加的灵活;关节轴承固定盖板将关节轴承与主轴的关键部位防护至密封的空间中,极大的缓解了外部环境对相关机构的侵蚀,具有很好的