
一种货物装卸车和货物转运系统.pdf

文光****iu


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种货物装卸车和货物转运系统.pdf
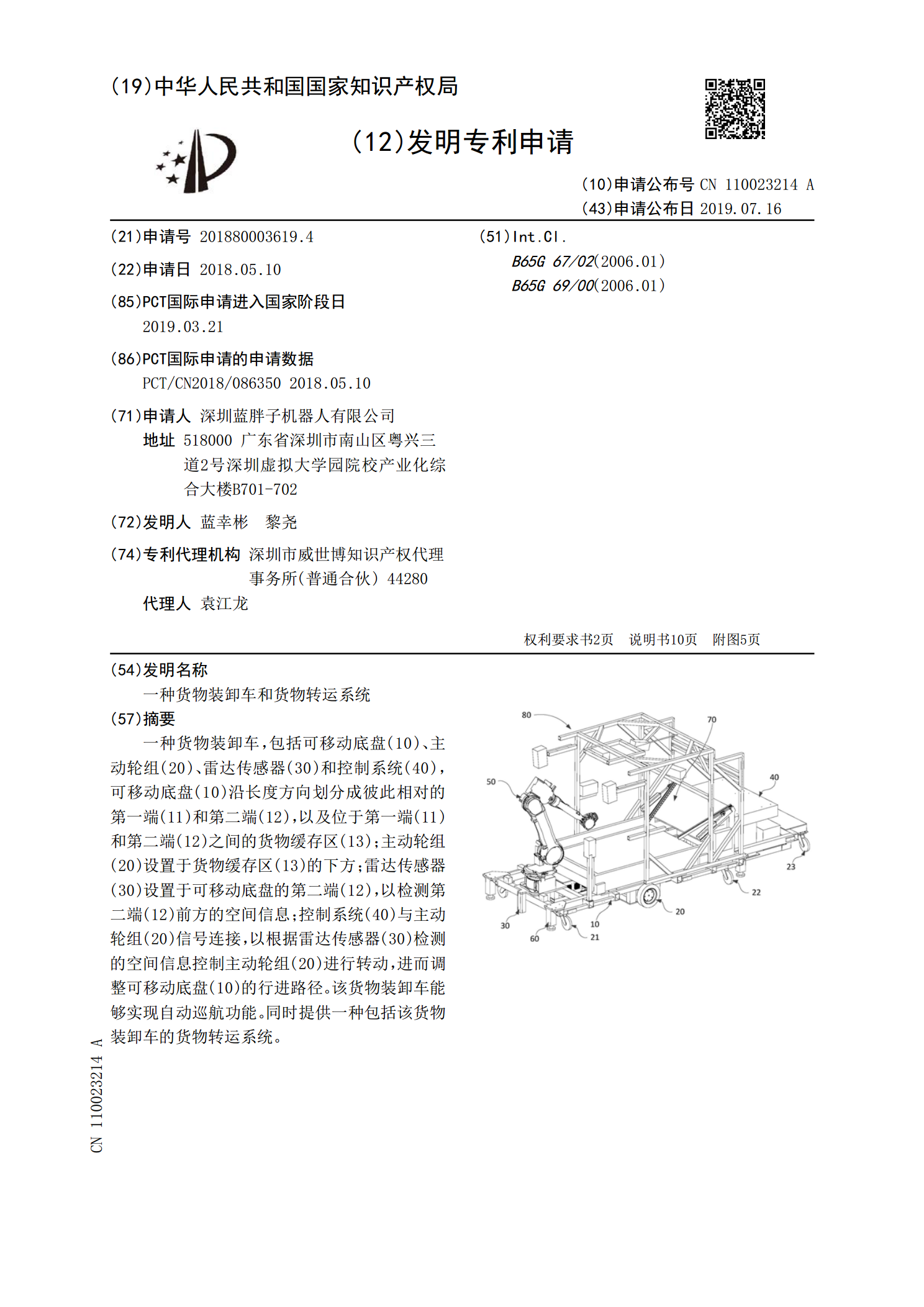
一种货物装卸车,包括可移动底盘(10)、主动轮组(20)、雷达传感器(30)和控制系统(40),可移动底盘(10)沿长度方向划分成彼此相对的第一端(11)和第二端(12),以及位于第一端(11)和第二端(12)之间的货物缓存区(13);主动轮组(20)设置于货物缓存区(13)的下方;雷达传感器(30)设置于可移动底盘的第二端(12),以检测第二端(12)前方的空间信息;控制系统(40)与主动轮组(20)信号连接,以根据雷达传感器(30)检测的空间信息控制主动轮组(20)进行转动,进而调整可移动底盘(10)

一种货物装卸车、货物转运系统及其自动调平方法.pdf
提供了一种货物装卸车、货物转运系统和自动调平装置。该货物装卸车包括可移动底盘(10)、工业机器人(50)、液压支撑系统(60)和控制系统(40);可移动底盘(10)划分为第一端(11)、第二端(12)和货物缓存区(13);工业机器人(50)设置于可移动底盘(10)的第二端,用于在可移动底盘(10)驻停后从货物缓存区拾取货物、搬运并释放至预设的装卸货地点;液压支撑系统(60)设置于可移动底盘(10)上,用于在可移动底盘(10)驻停后伸长以支撑于可移动底盘(10)与下方支撑面之间;控制系统(40)与液压支撑系
电动货物装卸车.pdf
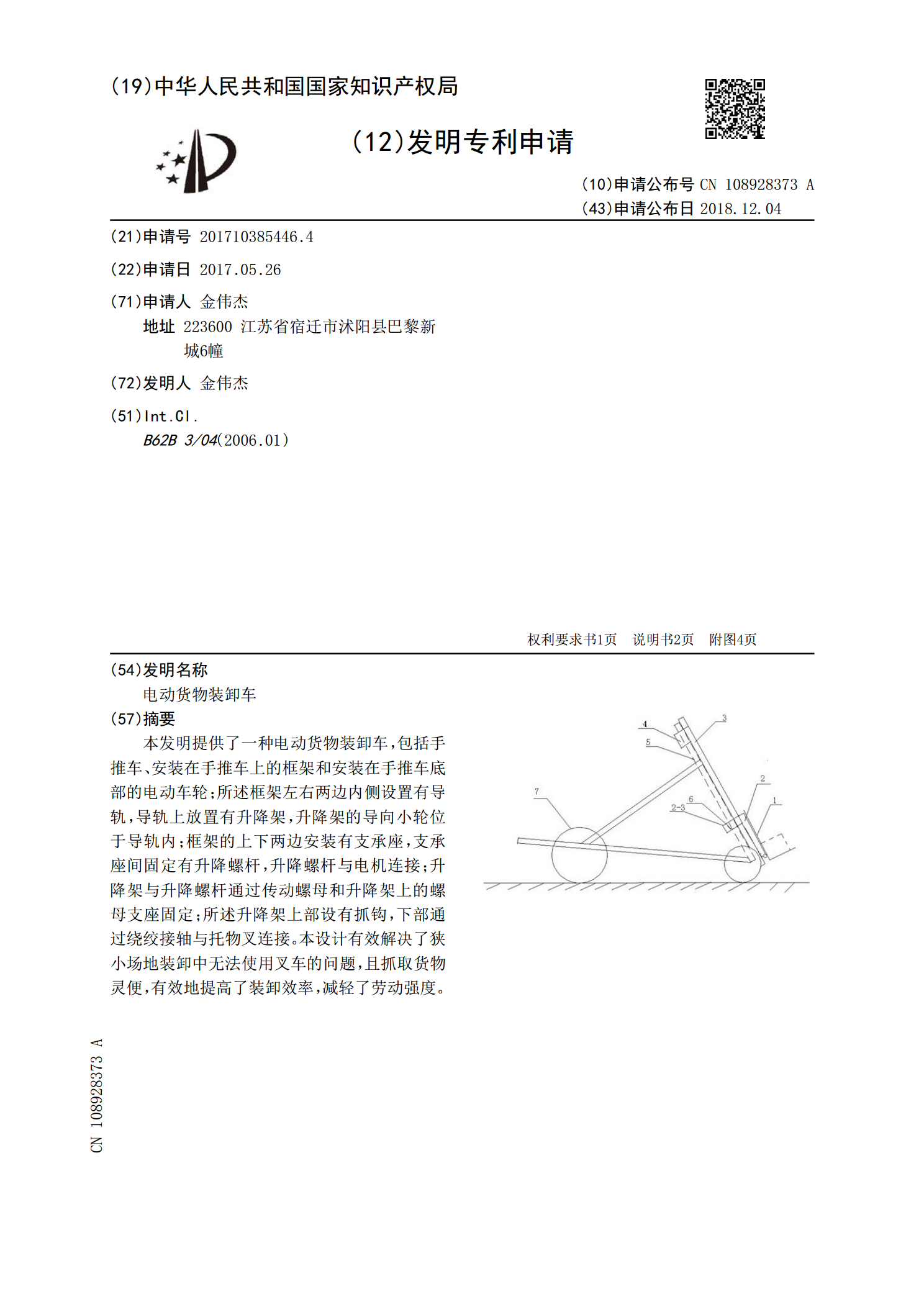
本发明提供了一种电动货物装卸车,包括手推车、安装在手推车上的框架和安装在手推车底部的电动车轮;所述框架左右两边内侧设置有导轨,导轨上放置有升降架,升降架的导向小轮位于导轨内;框架的上下两边安装有支承座,支承座间固定有升降螺杆,升降螺杆与电机连接;升降架与升降螺杆通过传动螺母和升降架上的螺母支座固定;所述升降架上部设有抓钩,下部通过绕绞接轴与托物叉连接。本设计有效解决了狭小场地装卸中无法使用叉车的问题,且抓取货物灵便,有效地提高了装卸效率,减轻了劳动强度。
一种物流用货物转运设备和方法.pdf
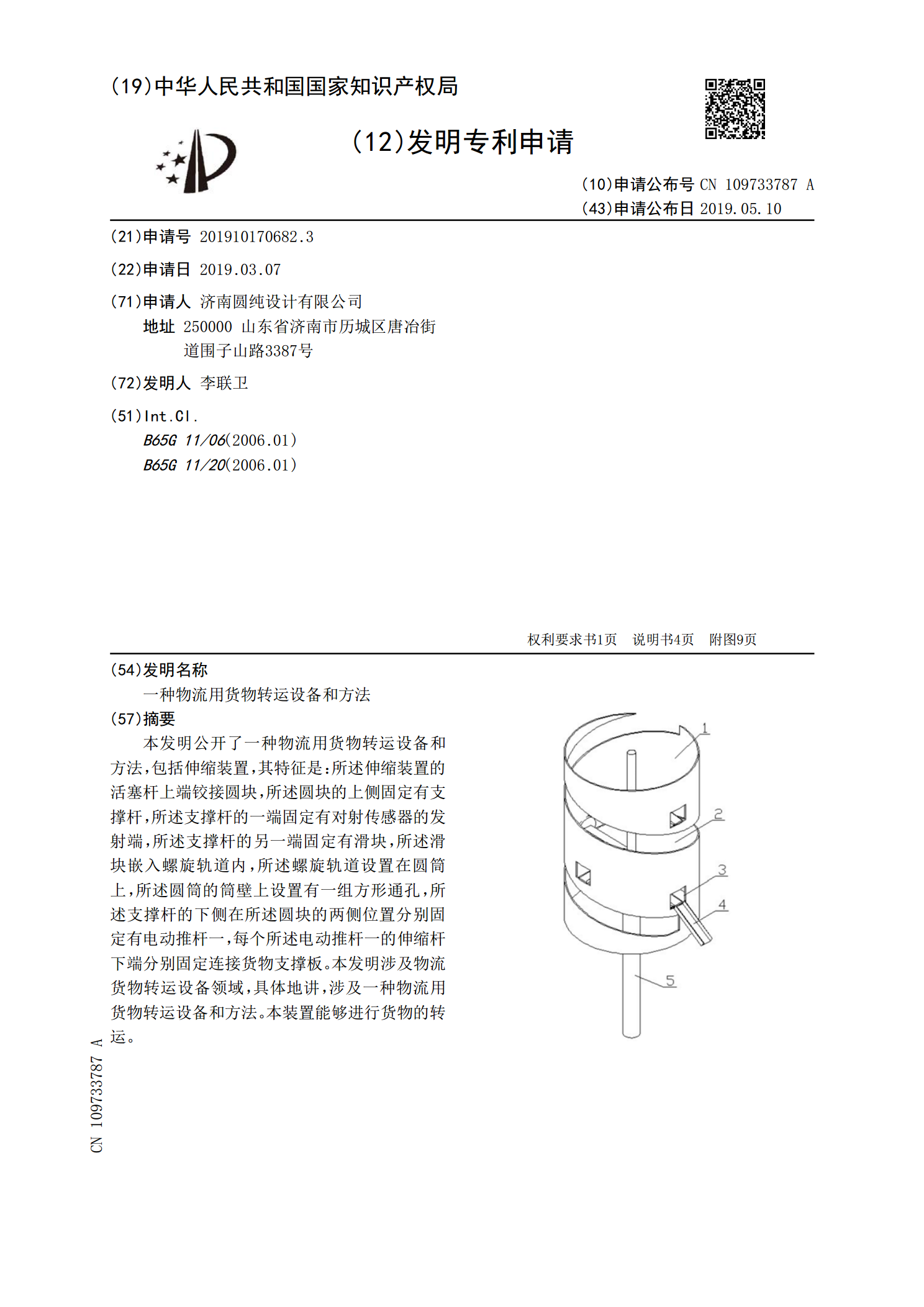
本发明公开了一种物流用货物转运设备和方法,包括伸缩装置,其特征是:所述伸缩装置的活塞杆上端铰接圆块,所述圆块的上侧固定有支撑杆,所述支撑杆的一端固定有对射传感器的发射端,所述支撑杆的另一端固定有滑块,所述滑块嵌入螺旋轨道内,所述螺旋轨道设置在圆筒上,所述圆筒的筒壁上设置有一组方形通孔,所述支撑杆的下侧在所述圆块的两侧位置分别固定有电动推杆一,每个所述电动推杆一的伸缩杆下端分别固定连接货物支撑板。本发明涉及物流货物转运设备领域,具体地讲,涉及一种物流用货物转运设备和方法。本装置能够进行货物的转运。

一种货物转运笼车.pdf
本发明公开了一种货物转运笼车,包括铰接在一起的第一侧板和第二侧板,第一侧板宽度小于第二侧板,第一侧板上铰接有左侧门,第二侧板远离第一侧板的一侧铰接有宽度等于第一侧板的第三侧板,第三侧板远离第二侧板的一侧铰接有右侧门,左侧门与右侧门宽度和等于第二侧板宽度,第二侧板底部铰接有可向上翻转的底板,第二侧板底部两端分别设有一连接板,第一侧板底部和第三侧板底部上远离第二侧板的一端分别设有一连接板,底板翻下后置于四个连接板上,连接板的下表面设有滚轮,左侧门上活动设有伸出时将右侧门锁定以避免右侧门转动的锁定杆,第一侧板上