
一种裁床的位图轮廓坐标提取方法.pdf

论文****酱吖


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种裁床的位图轮廓坐标提取方法.pdf
一种裁床的位图轮廓坐标提取方法,包括如下步骤:1)将设计位图灰度化;2)灰度图像二值化;3)将二值图像去噪,保证轮廓信息的正确性,避免噪音的干扰;4)使用Canny算子将去噪后的图像提取轮廓,得到切割轮廓的所有节点;5)初步剔除掉得到的轮廓中不需要进行切割的轮廓,并将确定为闭合轮廓的非闭合轮廓拼接起来;6)剔除掉轮廓中处在同一条直线上的冗余节点,在不影响切割效果的情况下提高了切割速度,重复步骤6),直至剔除掉所有的冗余节点;7)去除掉内轮廓中包含的轮廓,去除掉得到的所有轮廓中不需要切割的轮廓。本发明在极大
一种从位图自动轮廓提取及路径生成的方法.pdf
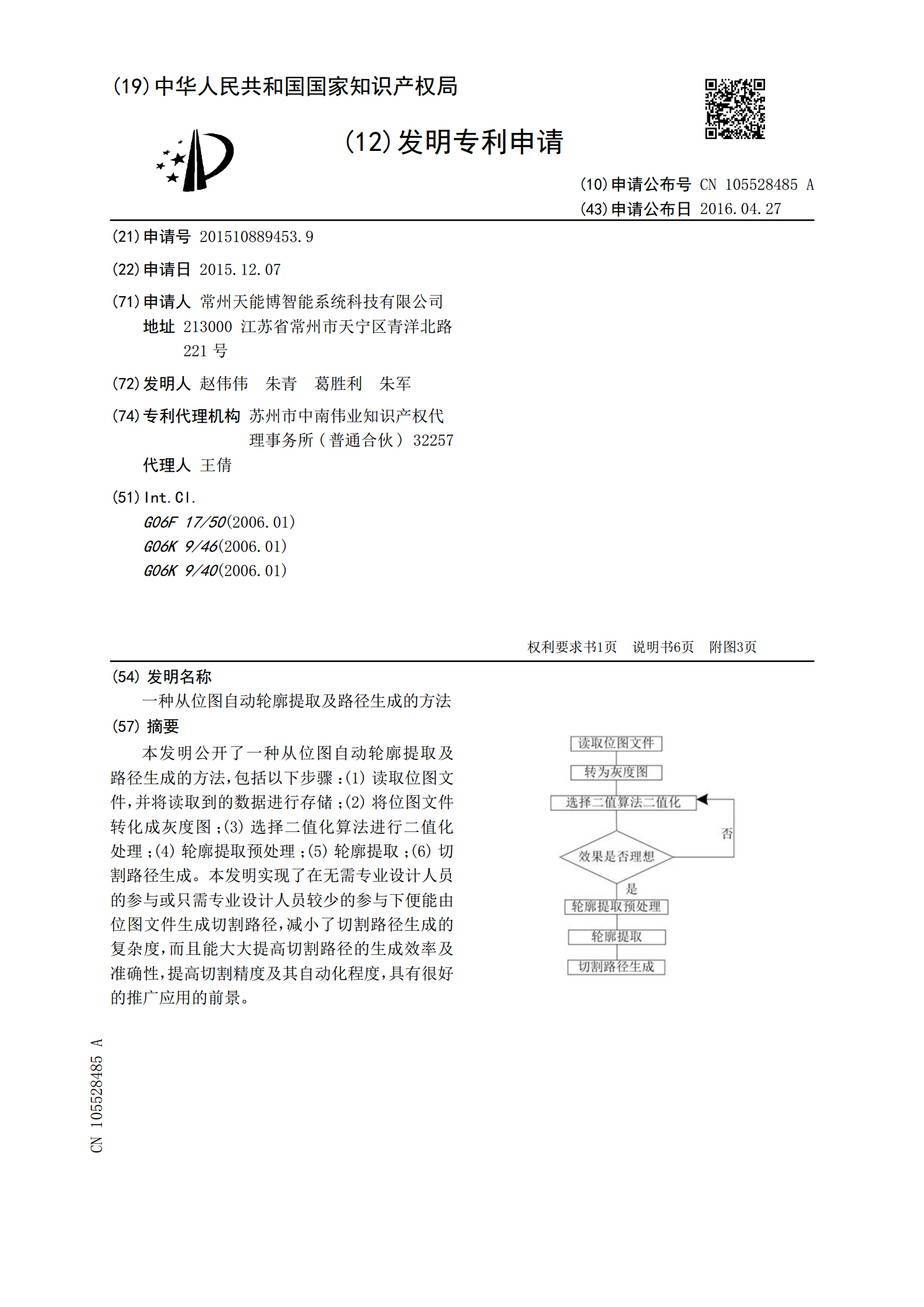
本发明公开了一种从位图自动轮廓提取及路径生成的方法,包括以下步骤:(1)读取位图文件,并将读取到的数据进行存储;(2)将位图文件转化成灰度图;(3)选择二值化算法进行二值化处理;(4)轮廓提取预处理;(5)轮廓提取;(6)切割路径生成。本发明实现了在无需专业设计人员的参与或只需专业设计人员较少的参与下便能由位图文件生成切割路径,减小了切割路径生成的复杂度,而且能大大提高切割路径的生成效率及准确性,提高切割精度及其自动化程度,具有很好的推广应用的前景。
一种提高裁床切割机轨迹轮廓跟踪控制精度的方法.pdf
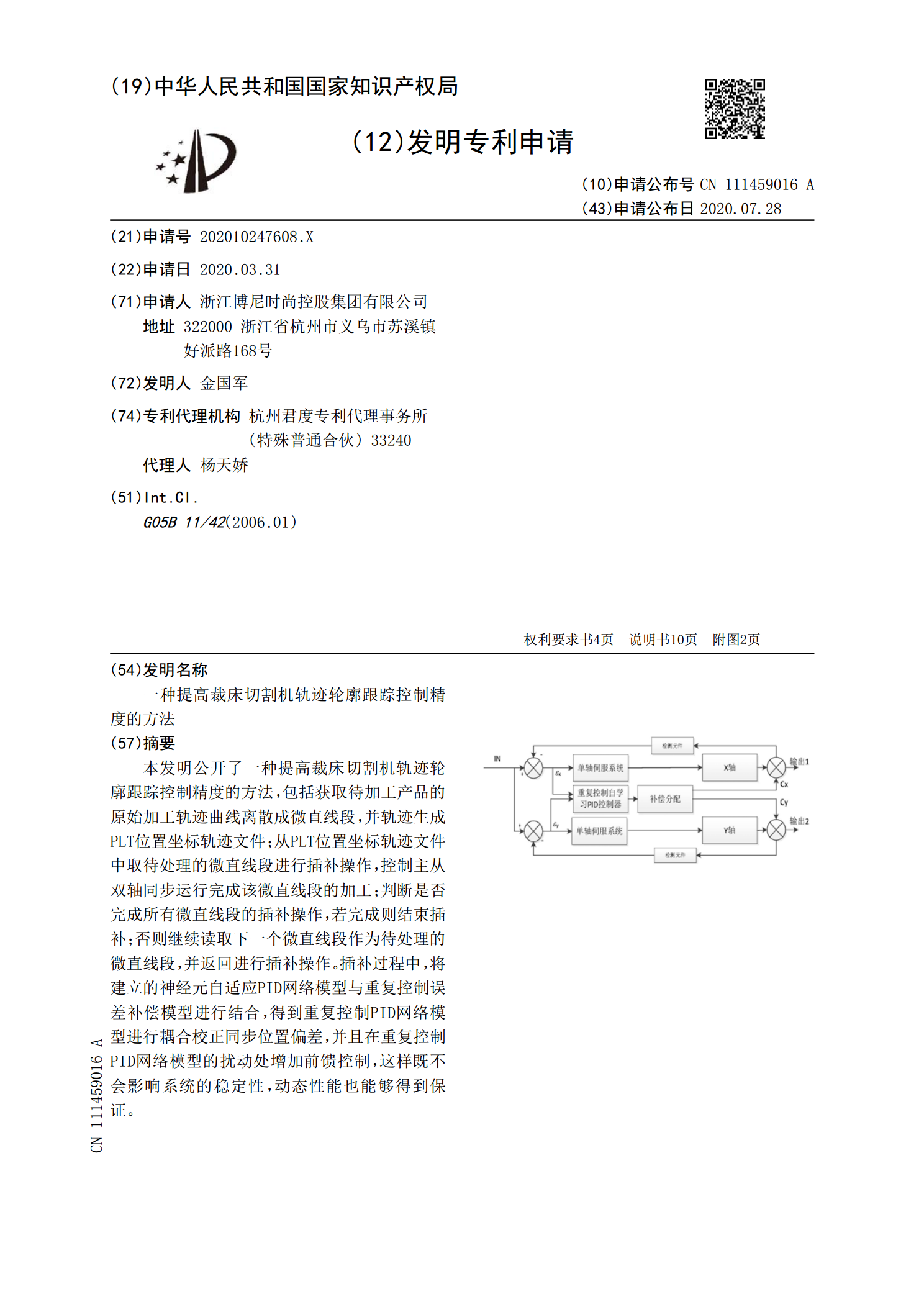
本发明公开了一种提高裁床切割机轨迹轮廓跟踪控制精度的方法,包括获取待加工产品的原始加工轨迹曲线离散成微直线段,并轨迹生成PLT位置坐标轨迹文件;从PLT位置坐标轨迹文件中取待处理的微直线段进行插补操作,控制主从双轴同步运行完成该微直线段的加工;判断是否完成所有微直线段的插补操作,若完成则结束插补;否则继续读取下一个微直线段作为待处理的微直线段,并返回进行插补操作。插补过程中,将建立的神经元自适应PID网络模型与重复控制误差补偿模型进行结合,得到重复控制PID网络模型进行耦合校正同步位置偏差,并且在重复控制

一种嵌入式裁床控制器的实时轮廓误差补偿方法.pdf
一种嵌入式裁床控制器的实时轮廓误差补偿方法,包括如下步骤:通过编码器反馈的当前位置和期望位置之间的偏差,得到X轴和Y轴的直接位置误差E

轮廓提取装置及轮廓提取方法.pdf
一种轮廓提取装置及轮廓提取方法,其根据摄像机拍摄的薄片材料的图像提取轮廓点,求出表示薄片材料的外形的外侧轮廓、及位于其内部的内侧轮廓。将内外轮廓之间的区域作为褶皱,求出所求的褶皱的形状的长径与短径之比,将该比较大的褶皱作为强褶皱,将该比较小的褶皱作为弱褶皱。将裁剪的工件根据褶皱的分级分配到薄片材料上。能够求出褶皱的形状,并且能够有效利用褶皱的部分。