
一种智能榫头加工中心的工作方法.pdf

岚风****55

1/9
2/9

3/9
4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能榫头加工中心的工作方法.pdf
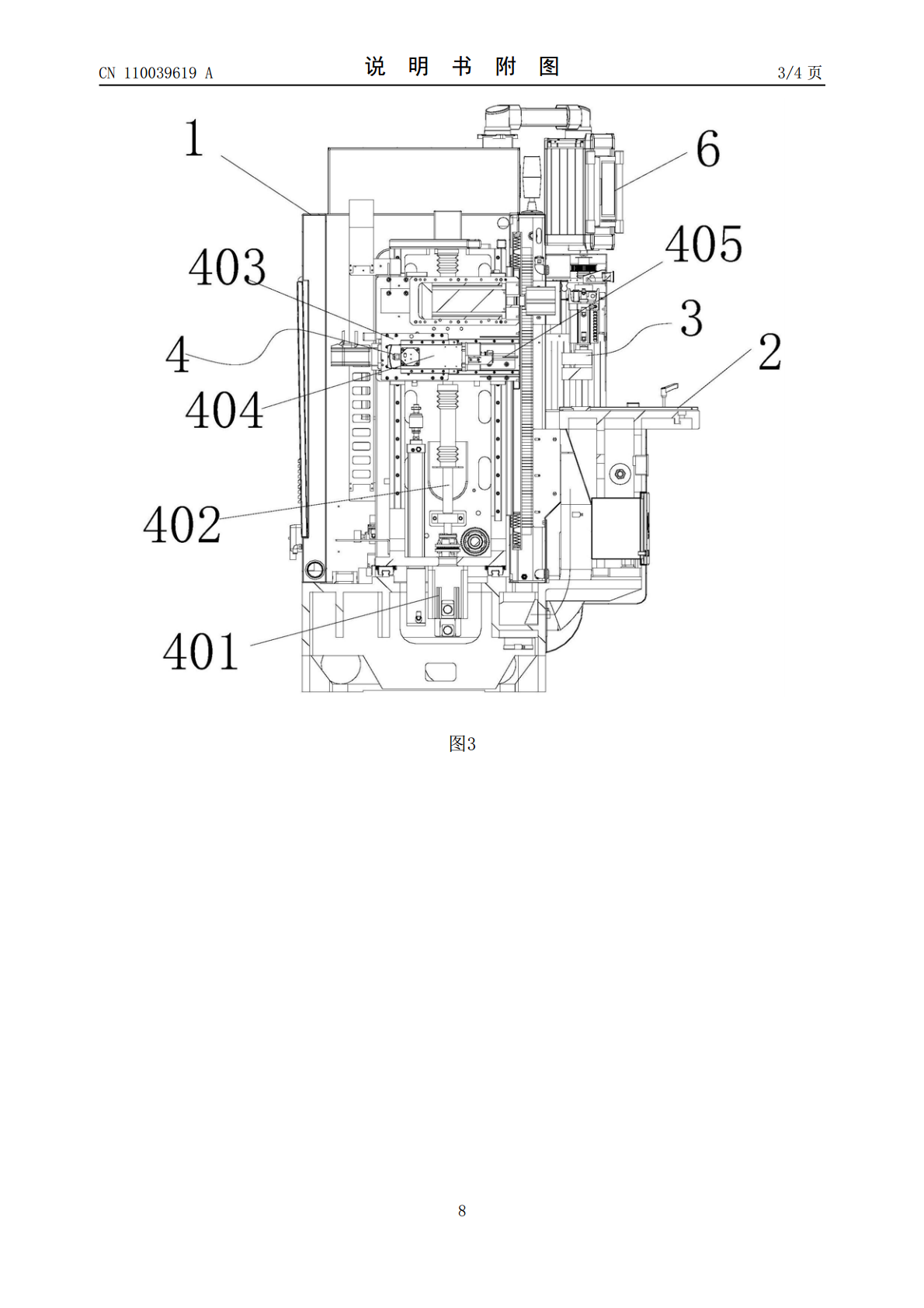
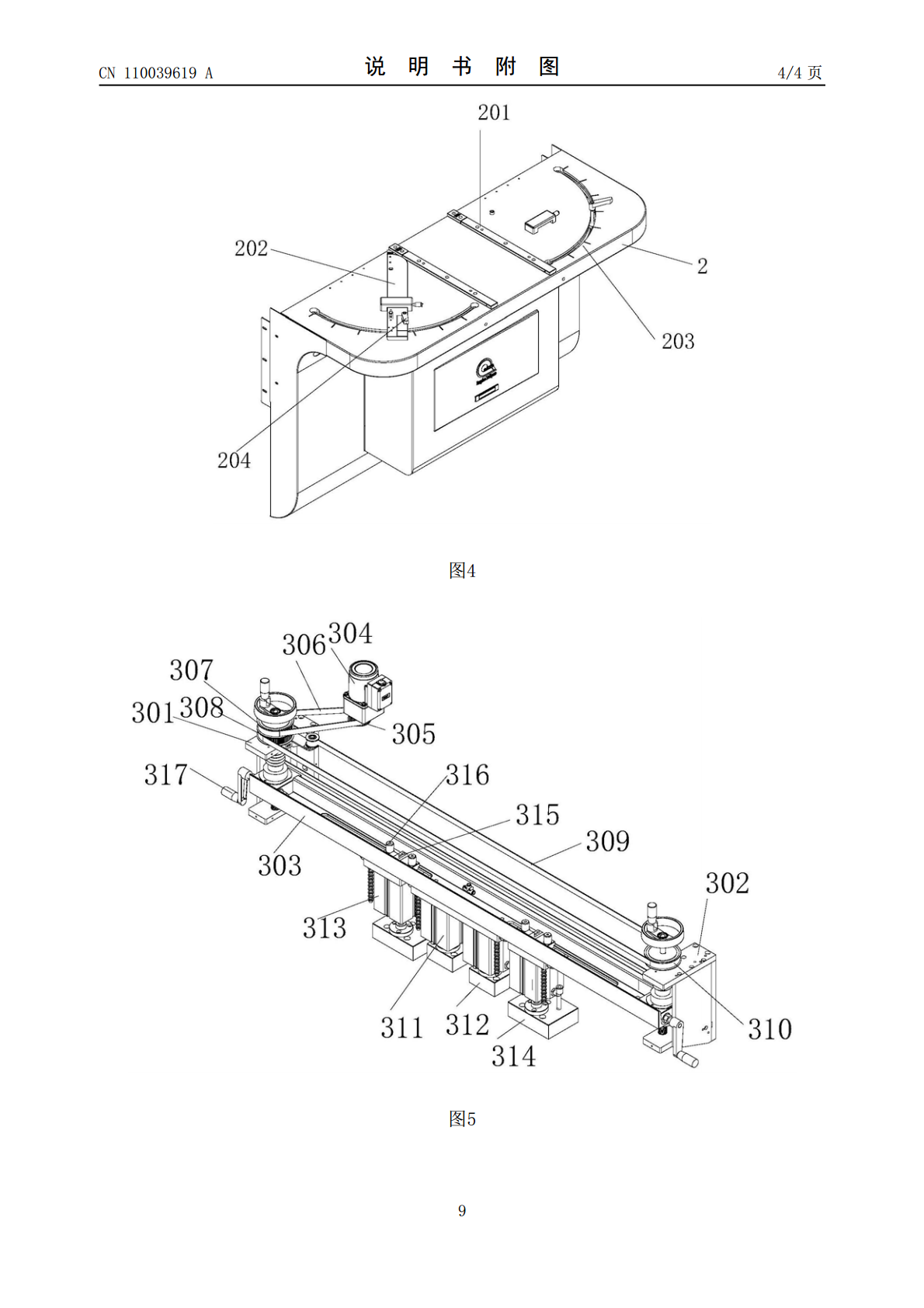
本发明涉及一种智能榫头加工中心的工作方法,包括如下步骤:人工将木方放置在工作台上,通过工作台上的中靠山和斜靠山对木方进行角度定位;手动摇动手摇轮驱动水平丝杆转动,水平丝杆转动驱动斜压紧气缸水平移动至木方正上方;通过控制中心设置木方加工区域,不同的加工区域通过不同的颜色件标注,并设置不同颜色区域的加工参数;压紧机构驱动将木方压紧,随后加工机构启动驱动刀具动作,通过刀具对木方进行加工。本发明将木方固定定位在工作台上,并通过压紧机构将木方压紧,随后通过加工机构对木方进行加工,加工精度和工作效率得到大大提高。

一种木工榫头的数控五轴加工中心.pdf
本发明公开了一种木工榫头的数控五轴加工中心,包括一底座,所述底座的上端安装有小电器箱、大电气箱和五轴传动机构,所述底座的上端一侧设置一凸起的平台,该凸起的平台上端面设置有两个放料平台,两个放料平台为左放料平台与右放料平台,左右放料平台互相平行设置;正对左右放料平台一侧的底座上端面上设置有两个Z轴导轨,Z轴导轨的上端活动设置一支撑架,所述支撑架的下端两侧分别活动安装于Z轴导轨上,所述支撑架的上端设置一T型支架,支撑架与T型支架之间呈T字形。本发明自带X、Y、Z、C、A五轴传动部分,通过电脑数控自带化机械全自

一种榫头加工装置.pdf
本发明公开了一种榫头加工装置,包括机架,机架的一侧沿X轴滑动安装有由第一动力装置驱动的底座,底座上以Z轴为中心转动安装有由第二动力装置驱动的旋转工作台,坯料安装于旋转工作台上,机架上沿Z轴滑动安装有由第三动力装置驱动的支撑梁,机架上设有竖向滑轨,支撑架安装在竖向滑轨上并通过丝杠连接第三动力装置,支撑梁上沿Y轴滑动安装有由第四动力装置驱动的滑枕,支撑梁上设有横向滑轨,滑枕安装在横向滑轨上并通过丝杠连接第四动力装置,滑枕上安装有动力头,动力头上安装有铣刀,铣刀上安装有锯盘。所述装置可以高效、优质、重复性优异等
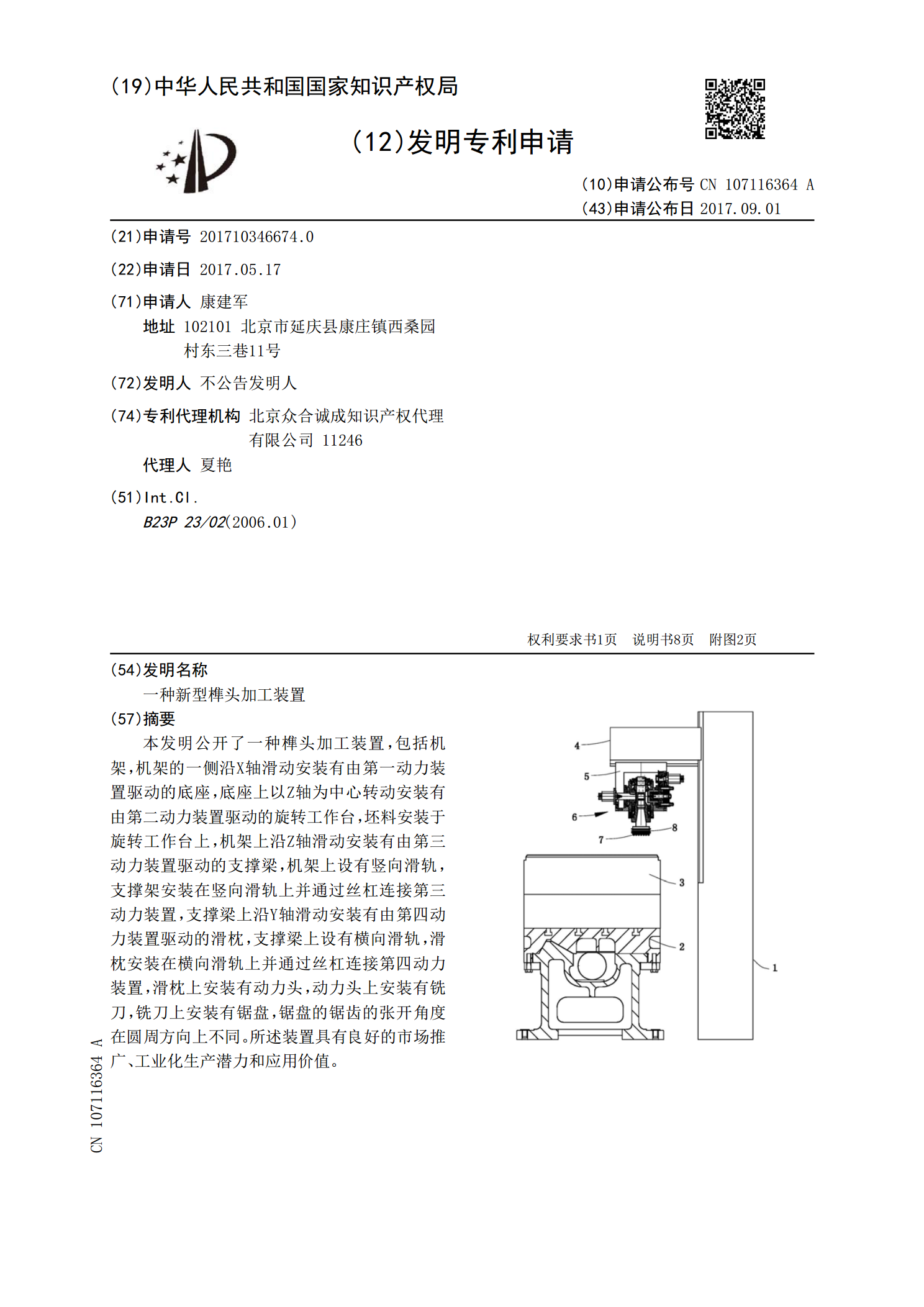
一种新型榫头加工装置.pdf
本发明公开了一种榫头加工装置,包括机架,机架的一侧沿X轴滑动安装有由第一动力装置驱动的底座,底座上以Z轴为中心转动安装有由第二动力装置驱动的旋转工作台,坯料安装于旋转工作台上,机架上沿Z轴滑动安装有由第三动力装置驱动的支撑梁,机架上设有竖向滑轨,支撑架安装在竖向滑轨上并通过丝杠连接第三动力装置,支撑梁上沿Y轴滑动安装有由第四动力装置驱动的滑枕,支撑梁上设有横向滑轨,滑枕安装在横向滑轨上并通过丝杠连接第四动力装置,滑枕上安装有动力头,动力头上安装有铣刀,铣刀上安装有锯盘,锯盘的锯齿的张开角度在圆周方向上不同
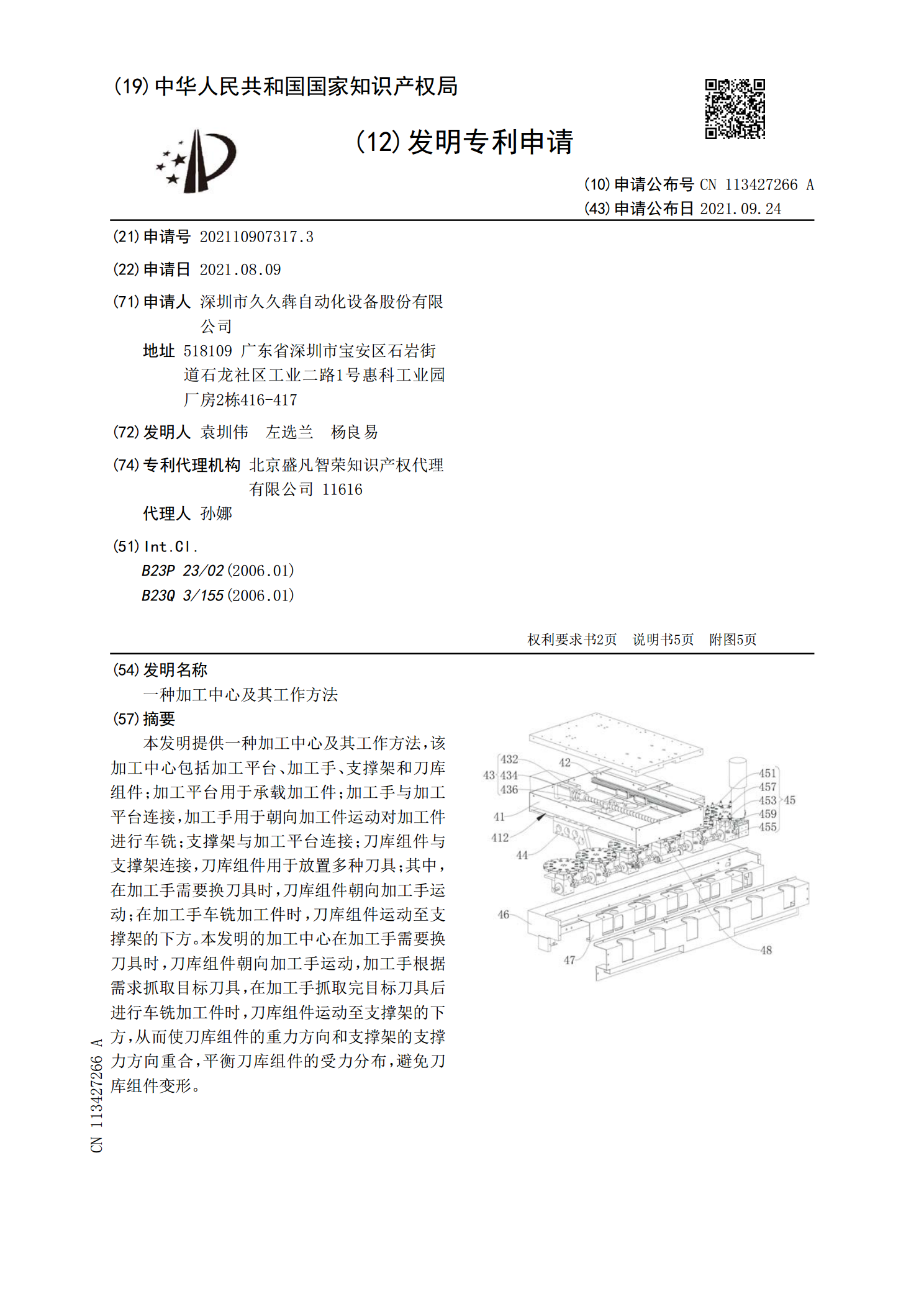
一种加工中心及其工作方法.pdf
本发明提供一种加工中心及其工作方法,该加工中心包括加工平台、加工手、支撑架和刀库组件;加工平台用于承载加工件;加工手与加工平台连接,加工手用于朝向加工件运动对加工件进行车铣;支撑架与加工平台连接;刀库组件与支撑架连接,刀库组件用于放置多种刀具;其中,在加工手需要换刀具时,刀库组件朝向加工手运动;在加工手车铣加工件时,刀库组件运动至支撑架的下方。本发明的加工中心在加工手需要换刀具时,刀库组件朝向加工手运动,加工手根据需求抓取目标刀具,在加工手抓取完目标刀具后进行车铣加工件时,刀库组件运动至支撑架的下方,从而