
一种基于传感器选择的双层粒子滤波检测前跟踪方法.pdf

书生****瑞梦

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于传感器选择的双层粒子滤波检测前跟踪方法.pdf
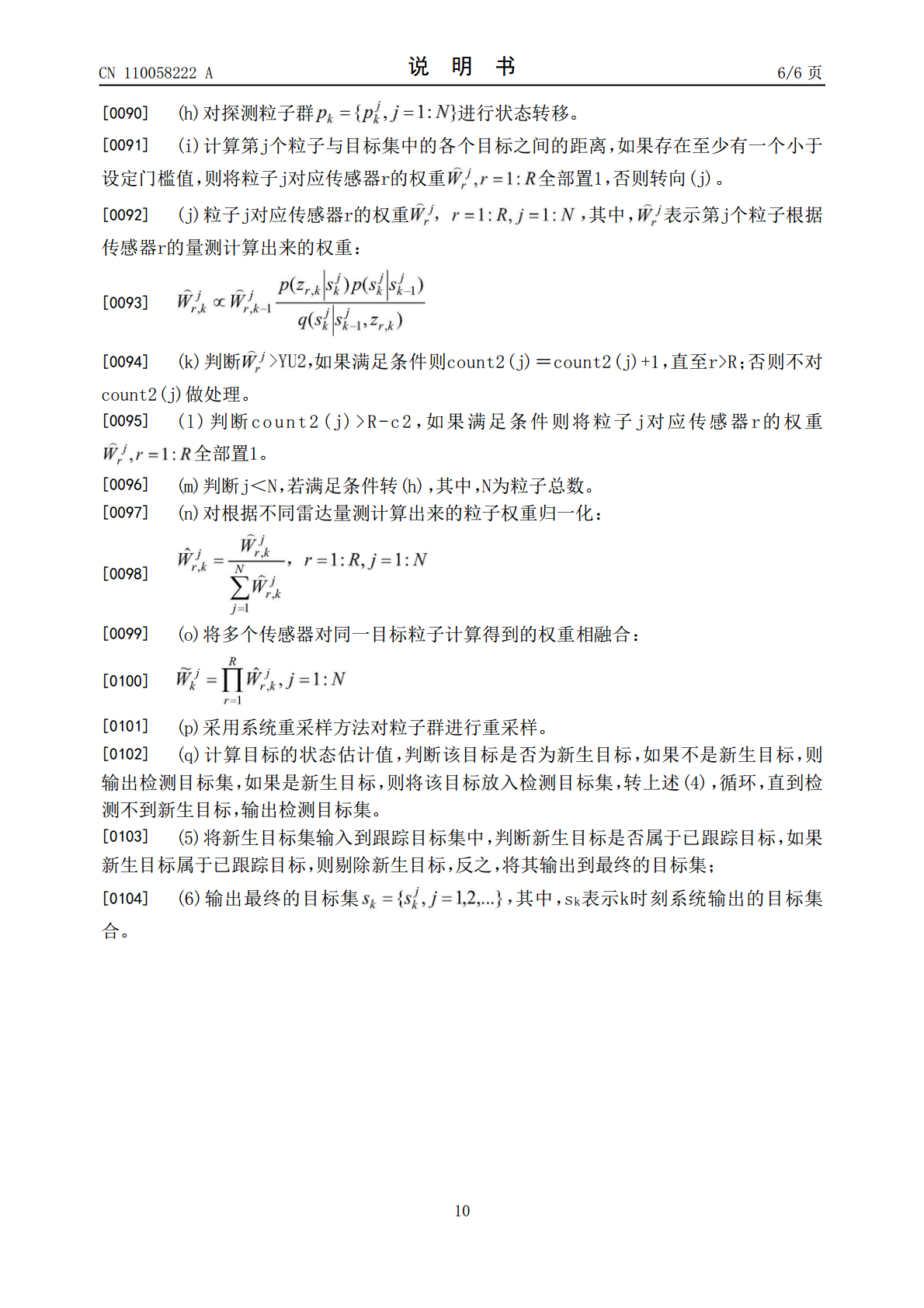
本发明公开了一种基于传感器选择的双层粒子滤波检测前跟踪方法,属于雷达检测前跟踪技术领域,特别涉及多雷达多目标粒子滤波检测前跟踪技术领域,该发明在跟踪层和检测层中分别加入一种管理传感器粒子权重的思想,使得算法能够在每一帧甚至每一轮检测中选择不同传感器的量测数据用于估计目标状态。该方法能够在远距离下准确的检测到每一帧的目标数目,降低了虚警率,提高了目标正确检测概率。
一种基于锦标赛选择的双层粒子滤波检测前跟踪方法.pdf
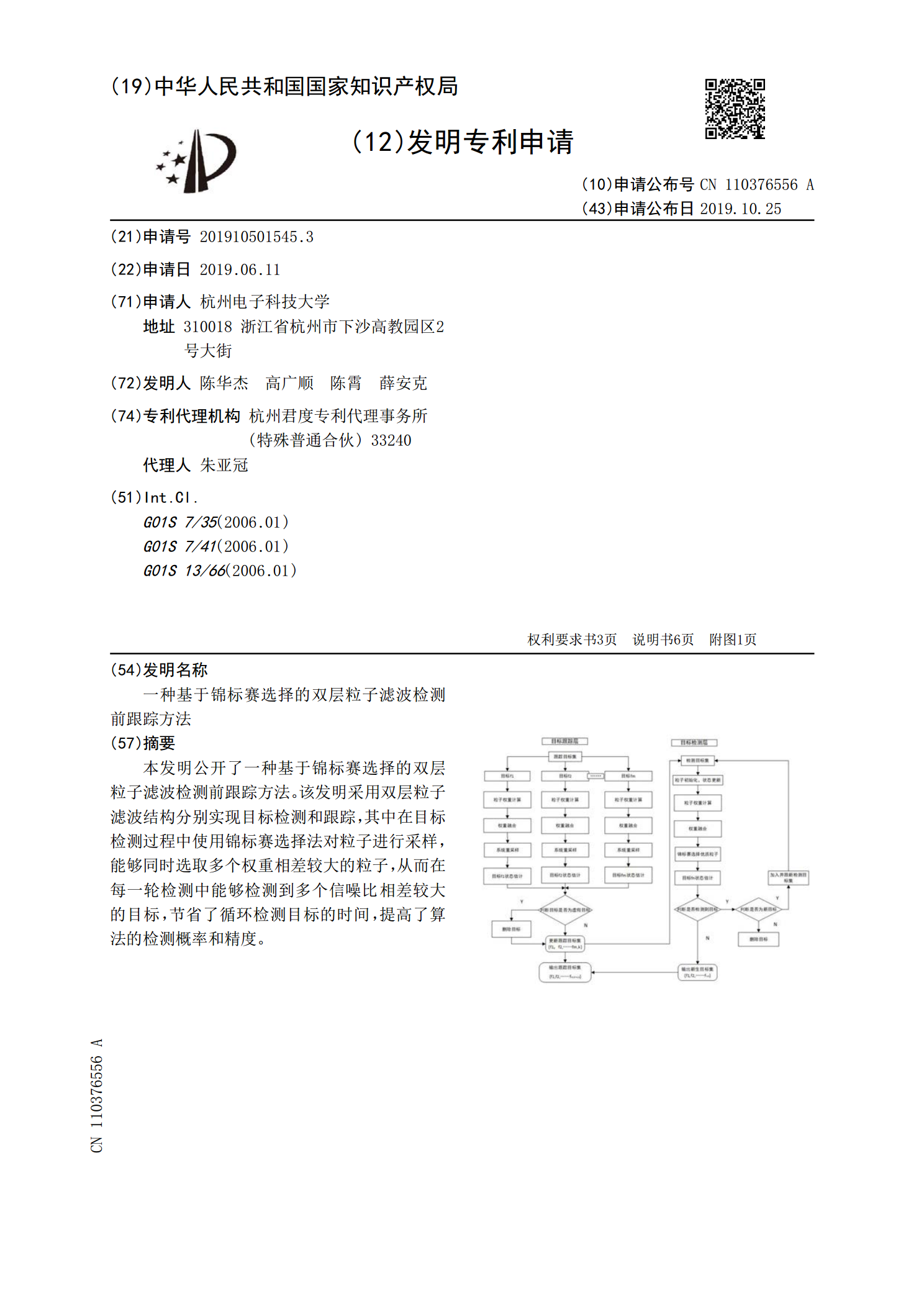
本发明公开了一种基于锦标赛选择的双层粒子滤波检测前跟踪方法。该发明采用双层粒子滤波结构分别实现目标检测和跟踪,其中在目标检测过程中使用锦标赛选择法对粒子进行采样,能够同时选取多个权重相差较大的粒子,从而在每一轮检测中能够检测到多个信噪比相差较大的目标,节省了循环检测目标的时间,提高了算法的检测概率和精度。
一种基于稀疏表示的粒子滤波检测前跟踪方法及装置.pdf
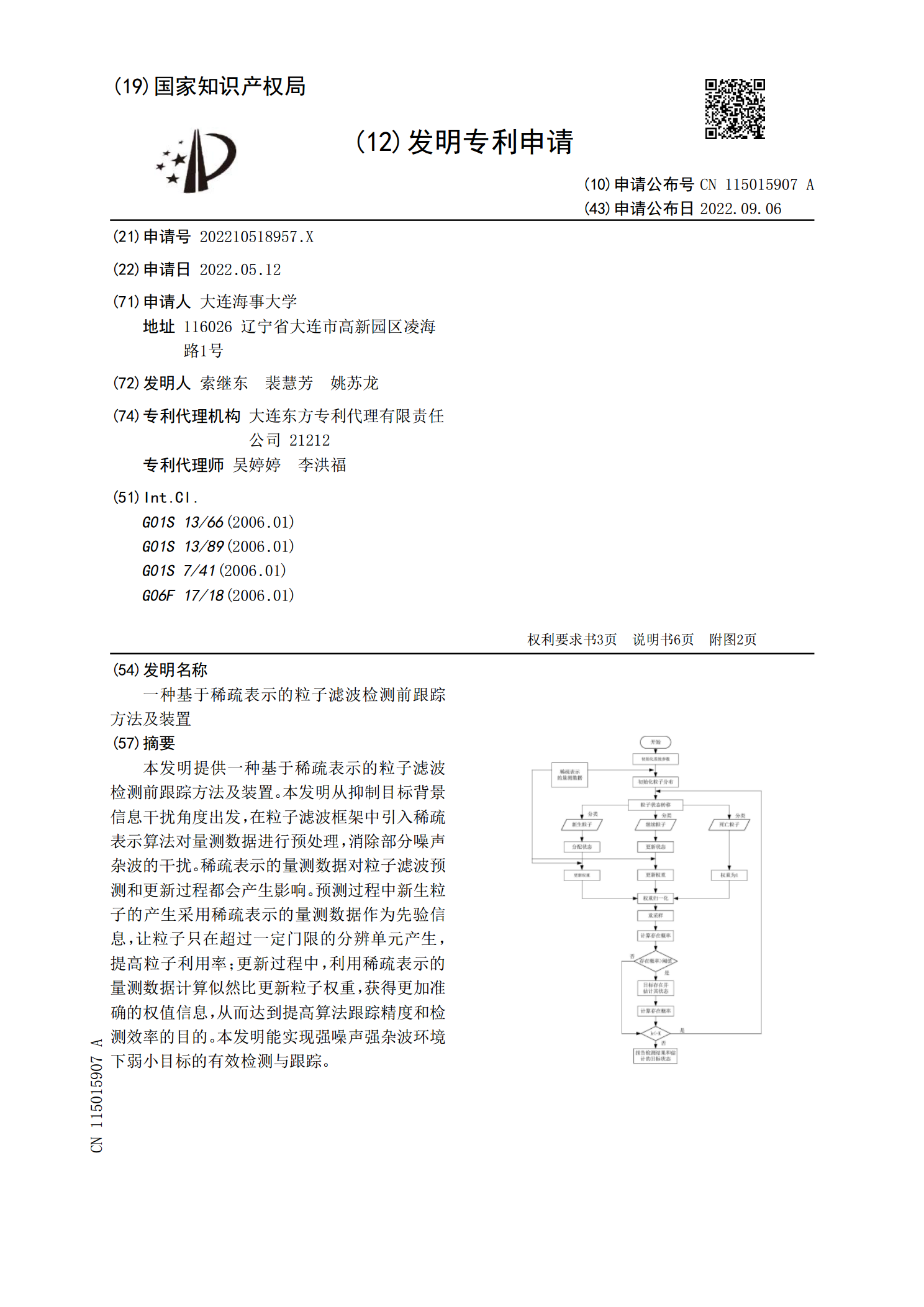
本发明提供一种基于稀疏表示的粒子滤波检测前跟踪方法及装置。本发明从抑制目标背景信息干扰角度出发,在粒子滤波框架中引入稀疏表示算法对量测数据进行预处理,消除部分噪声杂波的干扰。稀疏表示的量测数据对粒子滤波预测和更新过程都会产生影响。预测过程中新生粒子的产生采用稀疏表示的量测数据作为先验信息,让粒子只在超过一定门限的分辨单元产生,提高粒子利用率;更新过程中,利用稀疏表示的量测数据计算似然比更新粒子权重,获得更加准确的权值信息,从而达到提高算法跟踪精度和检测效率的目的。本发明能实现强噪声强杂波环境下弱小目标的有

一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法.pdf
本发明公开了一种基于目标重跟踪的多目标粒子滤波检测前跟踪方法,该方法在跟踪环节中,对已经跟踪完成且pb大于给定阈值的目标,按粒子权重值大小对跟踪粒子群按逆序进行排序,计算其前N/50个粒子的状态均值。以此状态均值为中心点,产生新的粒子,对跟踪粒子群的后0.98*N个粒子状态信息进行替换,粒子群存在值全置为1,保留了优质粒子,更新了粒子群,提高了粒子使用率,使跟踪点迹较快靠近真实目标,提高了目标的跟踪精度。此外,使虚假点迹更快接近真实目标,通过计算目标踪航迹长度len
一种基于代价参考粒子滤波器组的检测前跟踪方法.pdf
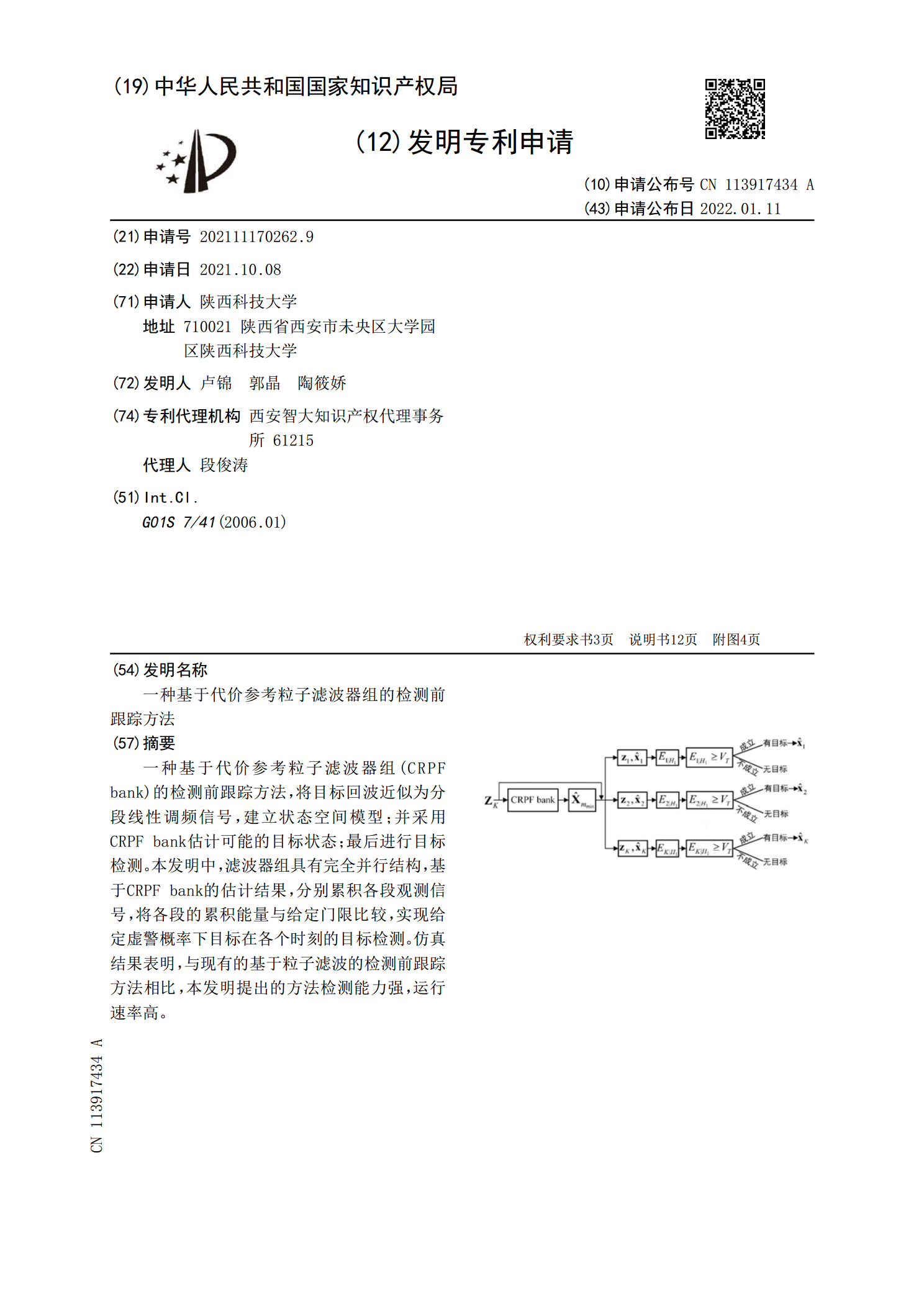
一种基于代价参考粒子滤波器组(CRPFbank)的检测前跟踪方法,将目标回波近似为分段线性调频信号,建立状态空间模型;并采用CRPFbank估计可能的目标状态;最后进行目标检测。本发明中,滤波器组具有完全并行结构,基于CRPFbank的估计结果,分别累积各段观测信号,将各段的累积能量与给定门限比较,实现给定虚警概率下目标在各个时刻的目标检测。仿真结果表明,与现有的基于粒子滤波的检测前跟踪方法相比,本发明提出的方法检测能力强,运行速率高。