
一种双圆弧有隙啮合少齿差行星传动装置.pdf

努力****爱静

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双圆弧有隙啮合少齿差行星传动装置.pdf
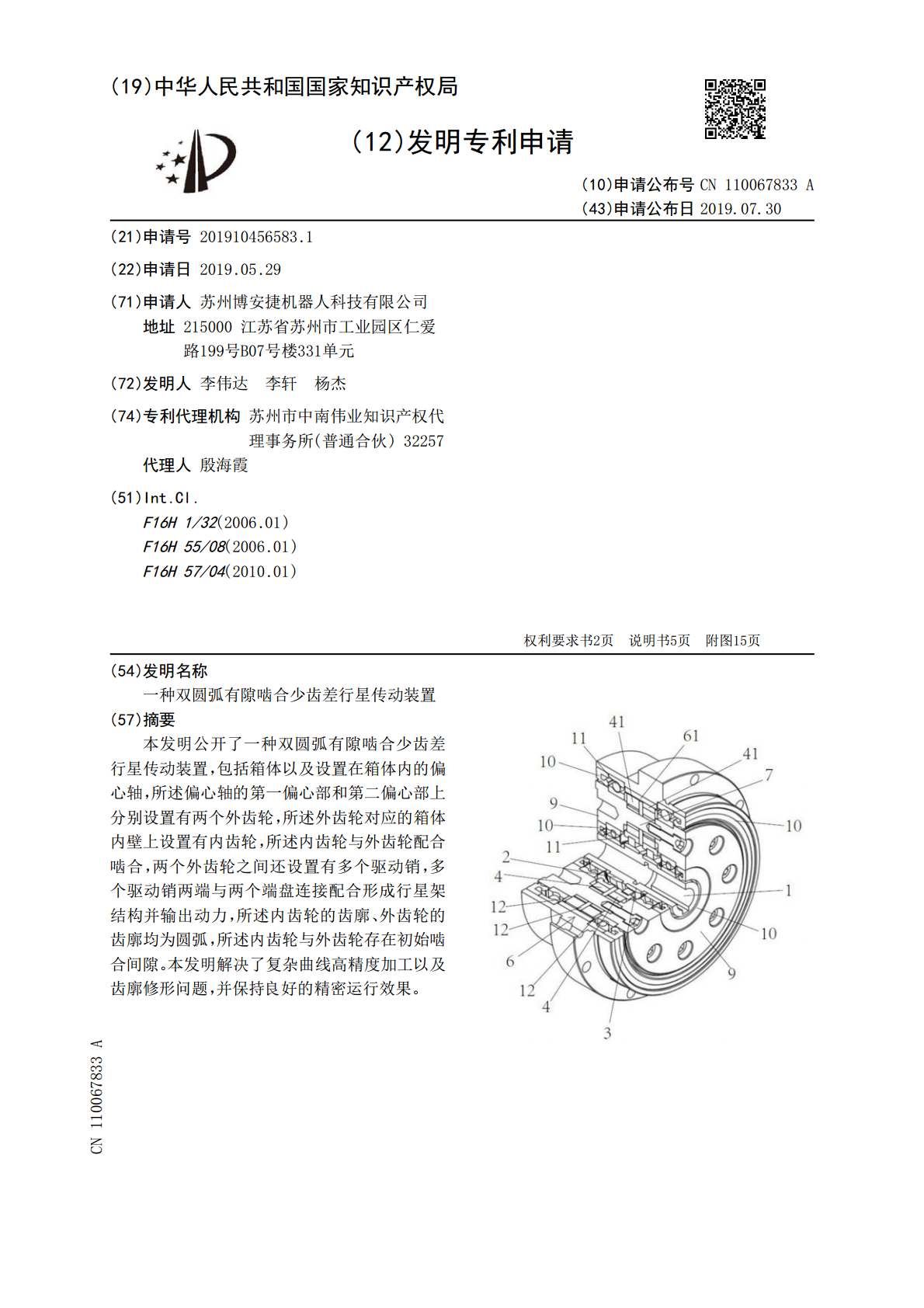
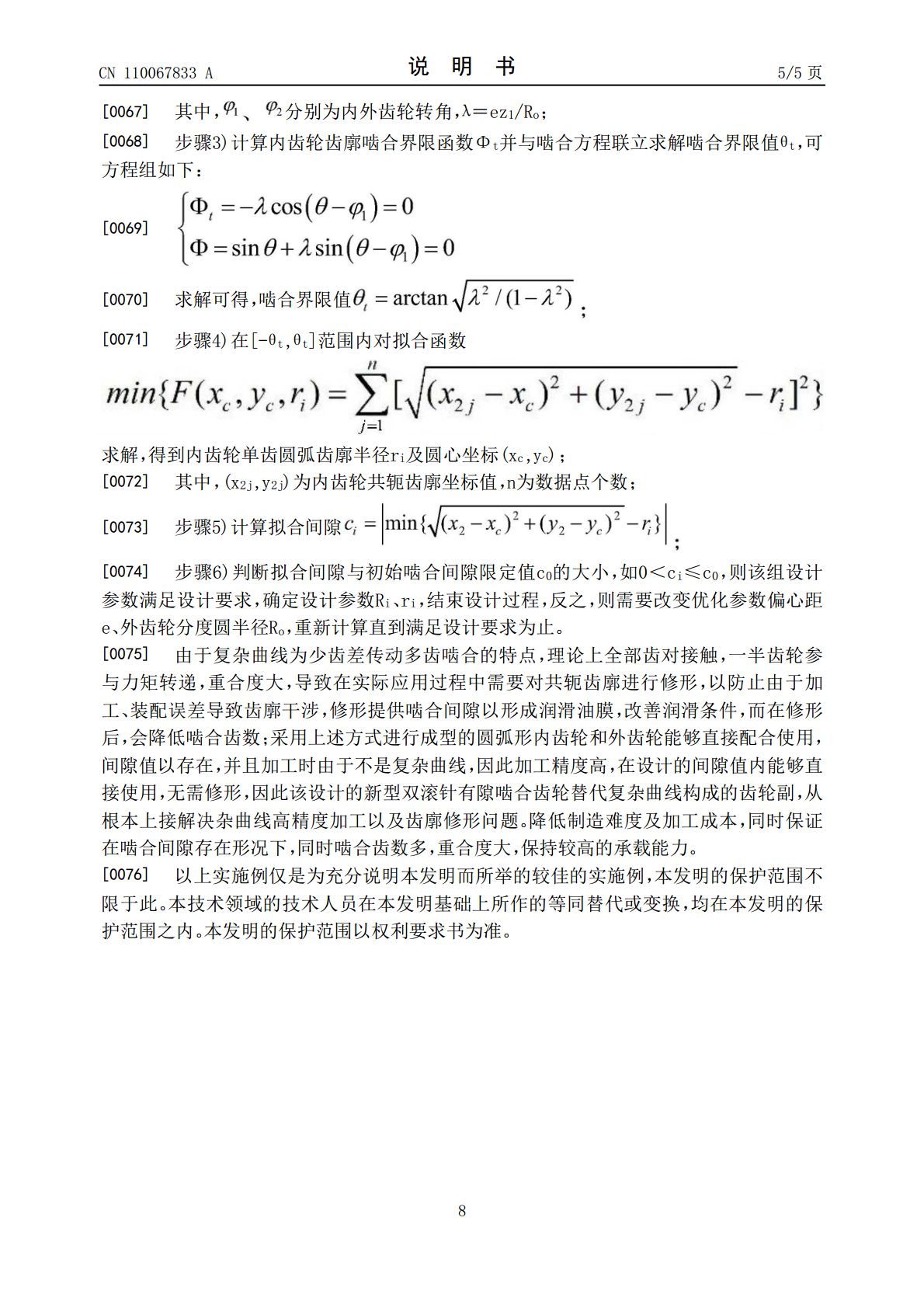
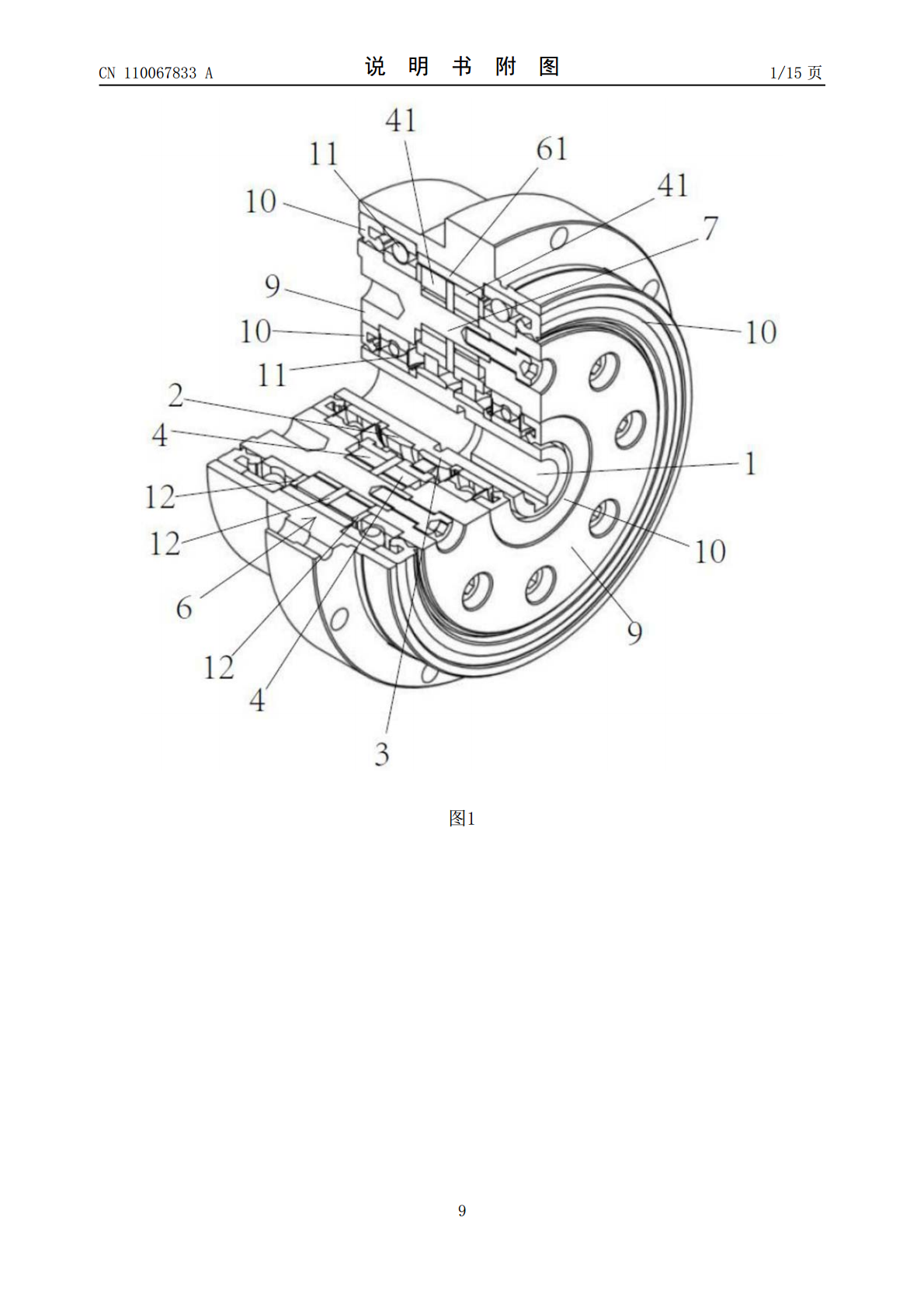
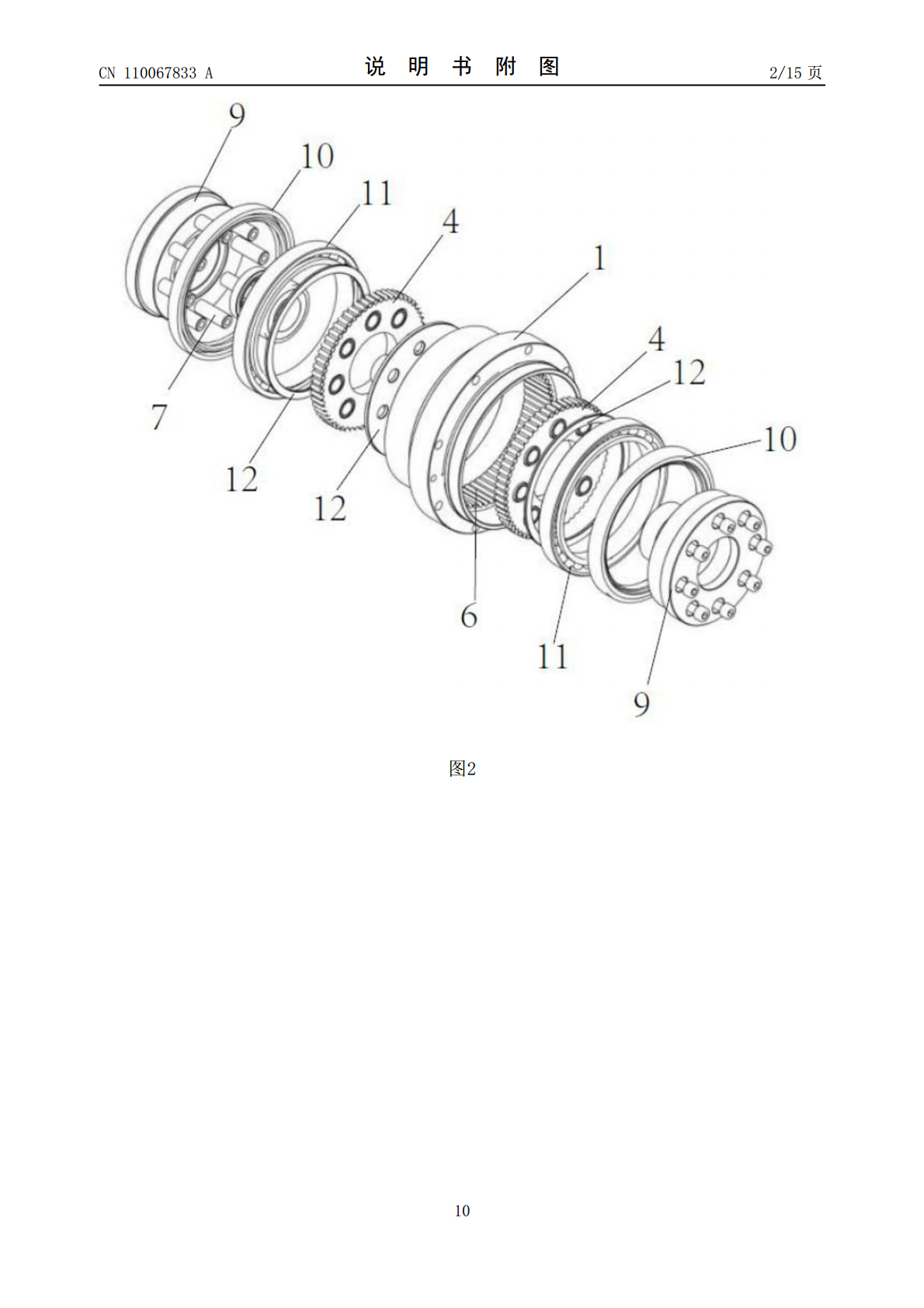
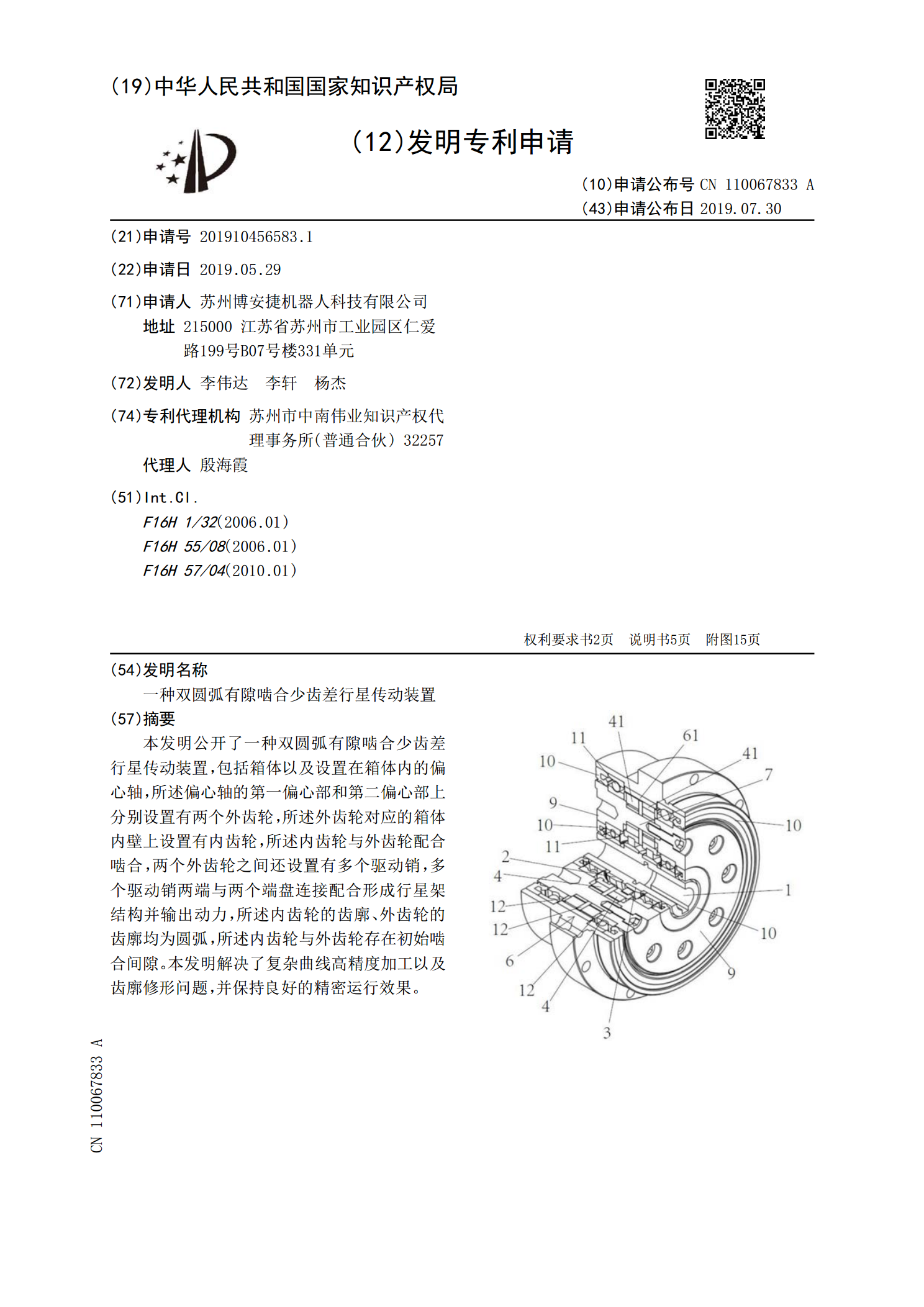
本发明公开了一种双圆弧有隙啮合少齿差行星传动装置,包括箱体以及设置在箱体内的偏心轴,所述偏心轴的第一偏心部和第二偏心部上分别设置有两个外齿轮,所述外齿轮对应的箱体内壁上设置有内齿轮,所述内齿轮与外齿轮配合啮合,两个外齿轮之间还设置有多个驱动销,多个驱动销两端与两个端盘连接配合形成行星架结构并输出动力,所述内齿轮的齿廓、外齿轮的齿廓均为圆弧,所述内齿轮与外齿轮存在初始啮合间隙。本发明解决了复杂曲线高精度加工以及齿廓修形问题,并保持良好的精密运行效果。
一种变异少齿差行星传动装置.pdf
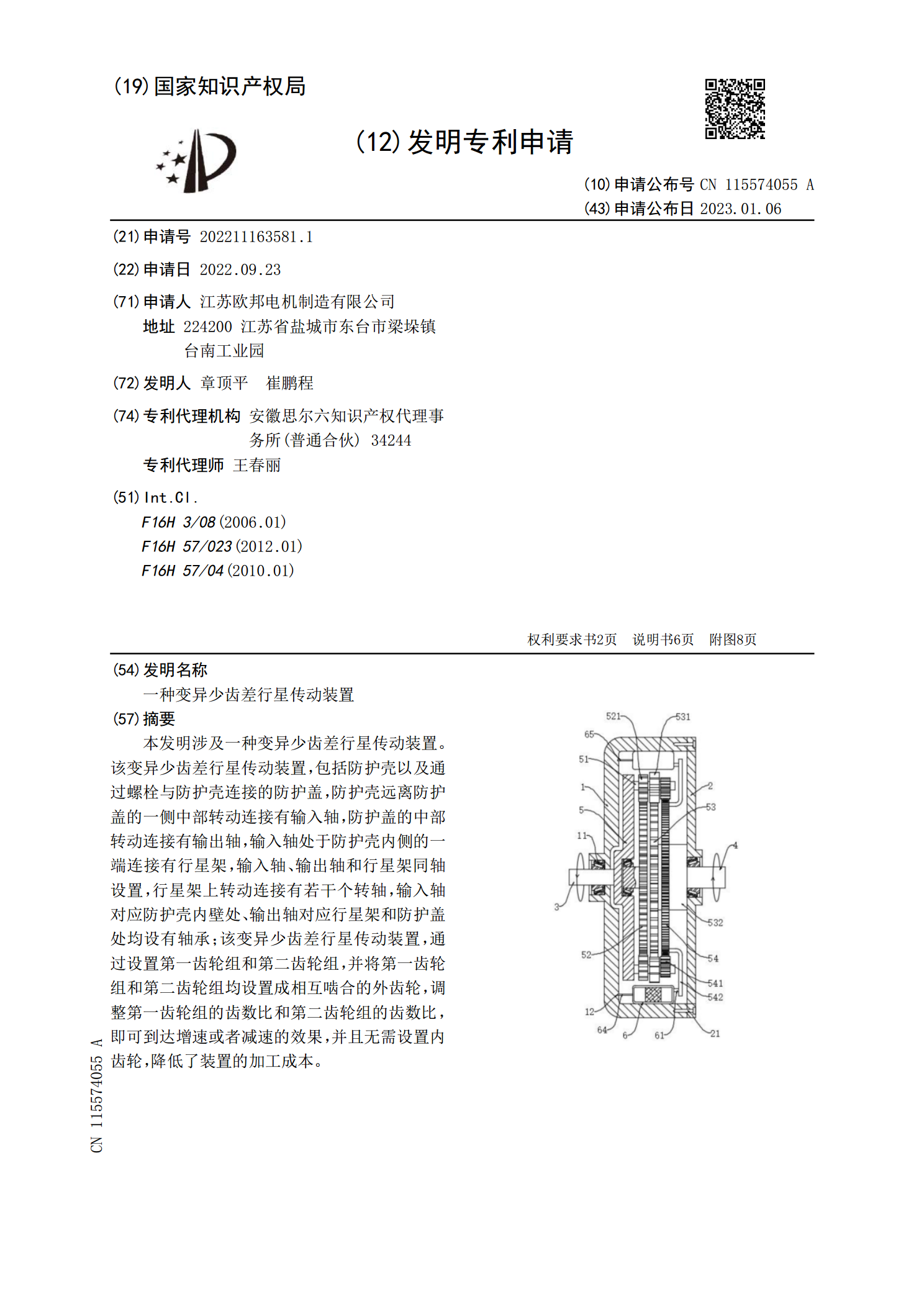
本发明涉及一种变异少齿差行星传动装置。该变异少齿差行星传动装置,包括防护壳以及通过螺栓与防护壳连接的防护盖,防护壳远离防护盖的一侧中部转动连接有输入轴,防护盖的中部转动连接有输出轴,输入轴处于防护壳内侧的一端连接有行星架,输入轴、输出轴和行星架同轴设置,行星架上转动连接有若干个转轴,输入轴对应防护壳内壁处、输出轴对应行星架和防护盖处均设有轴承;该变异少齿差行星传动装置,通过设置第一齿轮组和第二齿轮组,并将第一齿轮组和第二齿轮组均设置成相互啮合的外齿轮,调整第一齿轮组的齿数比和第二齿轮组的齿数比,即可到达增
一种少齿差行星齿轮分动传动装置.pdf
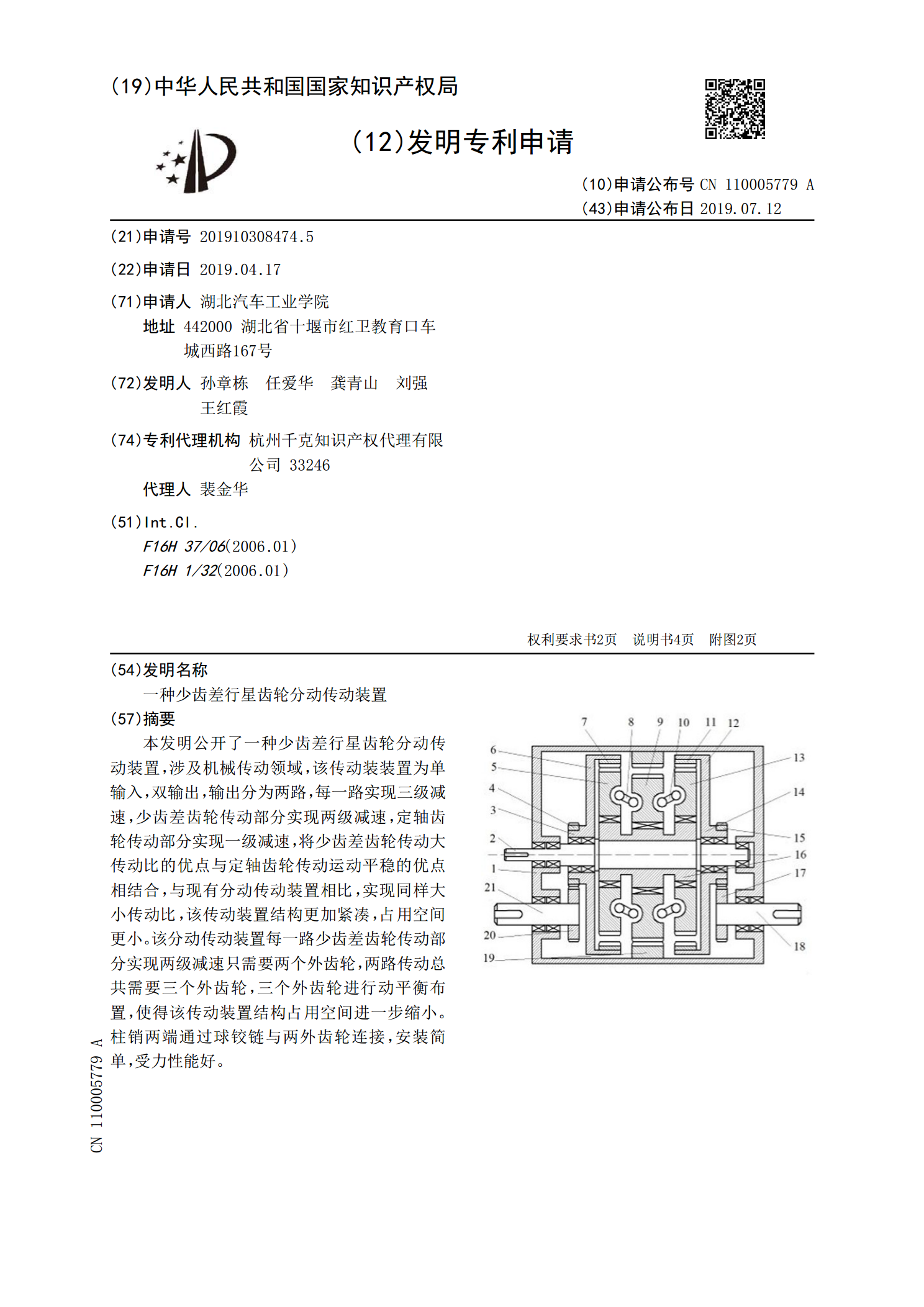
本发明公开了一种少齿差行星齿轮分动传动装置,涉及机械传动领域,该传动装装置为单输入,双输出,输出分为两路,每一路实现三级减速,少齿差齿轮传动部分实现两级减速,定轴齿轮传动部分实现一级减速,将少齿差齿轮传动大传动比的优点与定轴齿轮传动运动平稳的优点相结合,与现有分动传动装置相比,实现同样大小传动比,该传动装置结构更加紧凑,占用空间更小。该分动传动装置每一路少齿差齿轮传动部分实现两级减速只需要两个外齿轮,两路传动总共需要三个外齿轮,三个外齿轮进行动平衡布置,使得该传动装置结构占用空间进一步缩小。柱销两端通过球

一种智能自适应少齿差行星传动装置.pdf
本发明涉及少齿差行星传动领域,特别是涉及一种对工作负载实现智能自适应的少齿差行星传动装置。包括左行星轮、右行星轮、左端盘、右端盘、壳体和连接构件所述连接构件的一端沿轴向穿过所述左行星轮和右行星轮,且连接构件两端的端部分别与所述左端盘和所述右端盘固连,所述左行星轮同时与左端盘和壳体上的齿廓啮合,所述右行星轮同时与右端盘和壳体上的齿廓啮合,所述左行星轮、右行星轮、左端盘、右端盘和壳体形成力封闭机构。本发明通过左行星轮、右行星轮、左端盘、右端盘和壳体形成的力封闭机构使得该传动装置可以根据负载的变化自动无级调整传

基于CTC圆弧和单圆弧少齿差行星传动的RV减速器.pdf
本发明属于一种减速器,具体公开一种基于CTC圆弧和单圆弧少齿差行星传动的RV减速器,该减速器包括固定座、输入端法兰、偏心轴、行星轮、齿轮轴、外齿轮、输出端法兰,偏心轴中部套有外齿轮,外齿轮套在固定座;偏心轴的一端套有行星轮,偏心轴与行星轮之间设有输入端法兰,行星轮与安装在输入端法兰内的齿轮轴之间齿轮啮合;偏心轴的另一端与固定座之间设有输出端法兰。该减速器结构紧凑、机加工艺简单、传动精度高、承载能力强、扭转刚度大,传动平稳,能够满足航天伺服机构苛刻工况需求。