
一种风电机组偏航驱动系统均载测试验证方法.pdf

一只****懿呀


1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种风电机组偏航驱动系统均载测试验证方法.pdf
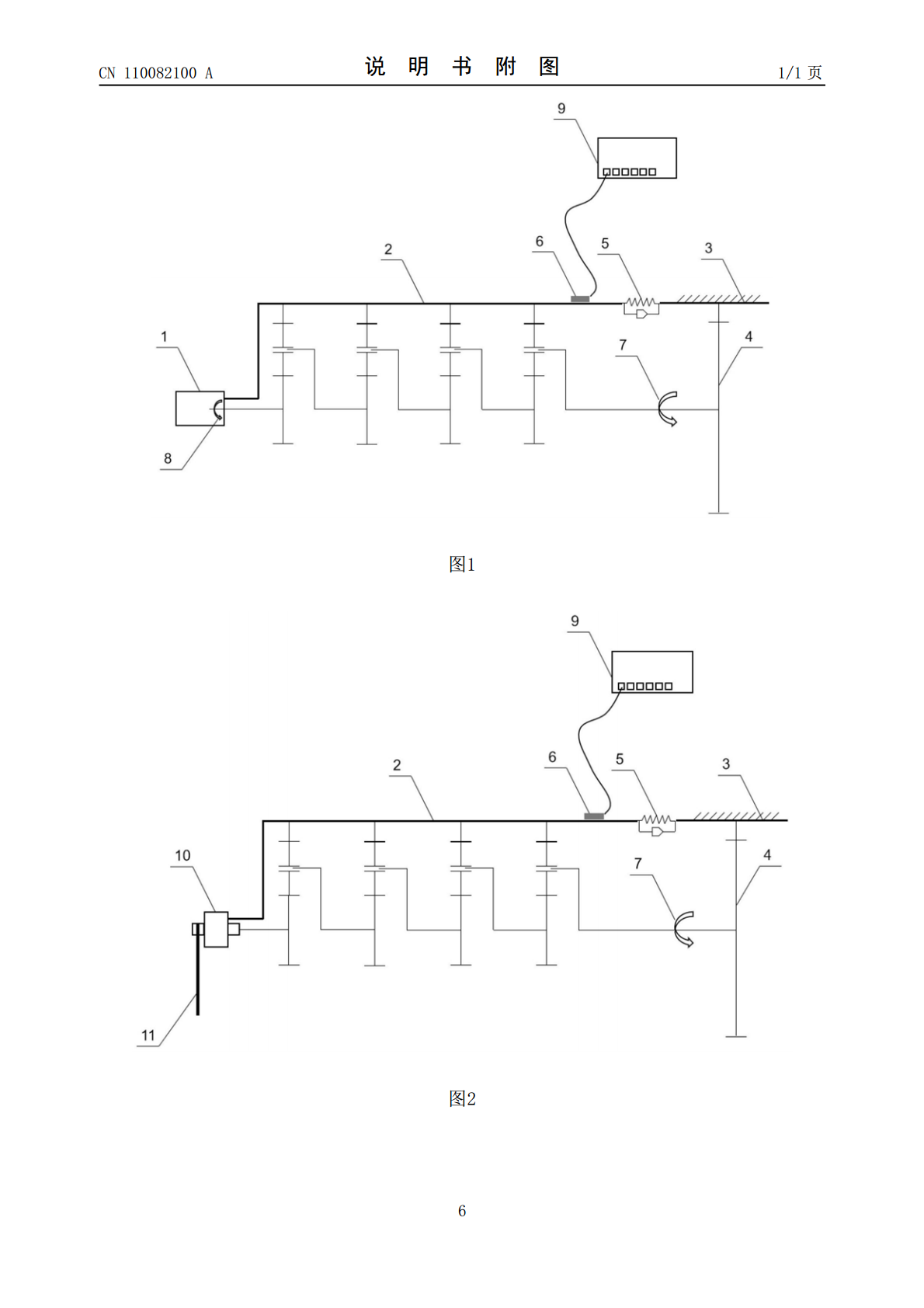
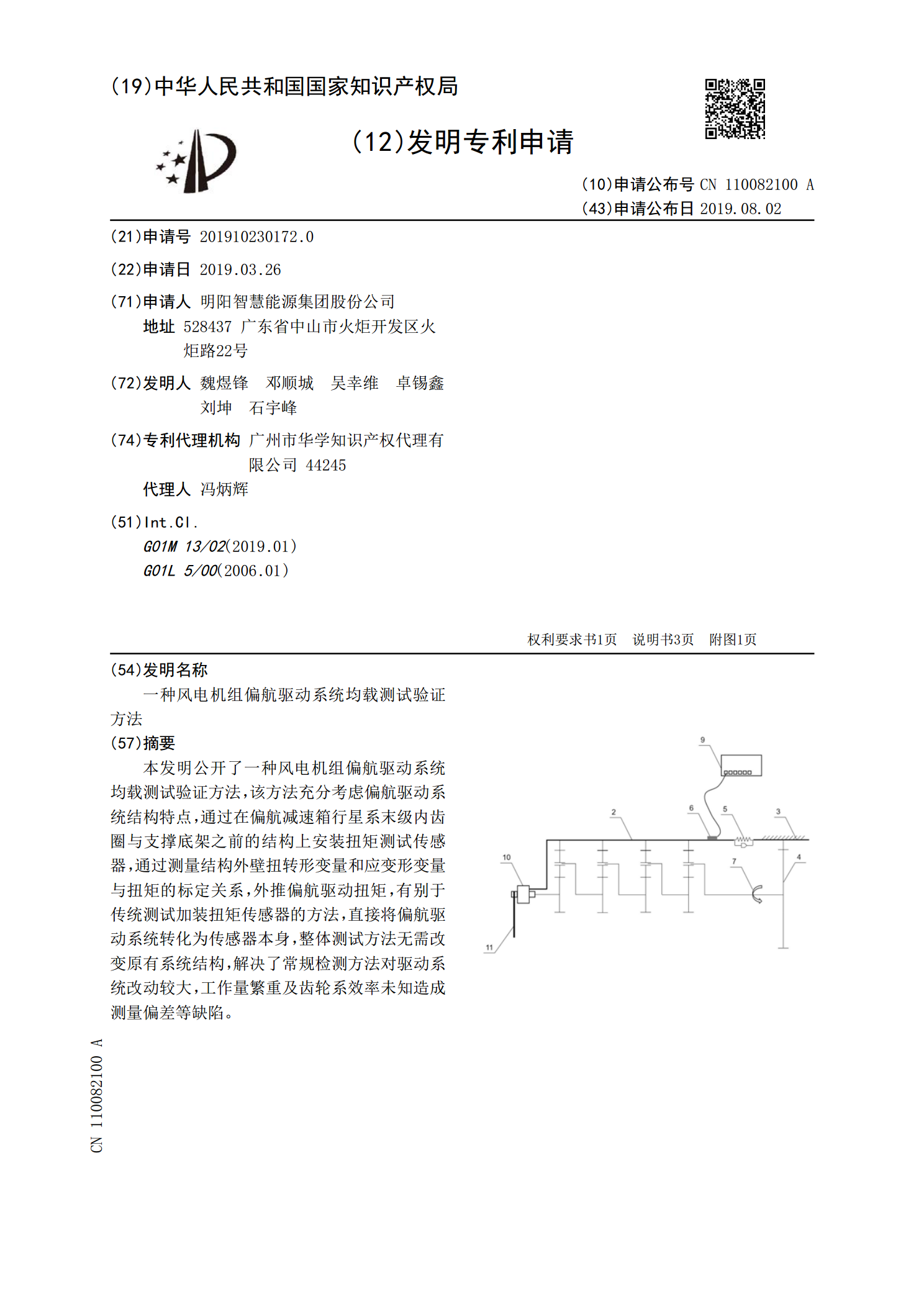
本发明公开了一种风电机组偏航驱动系统均载测试验证方法,该方法充分考虑偏航驱动系统结构特点,通过在偏航减速箱行星系末级内齿圈与支撑底架之前的结构上安装扭矩测试传感器,通过测量结构外壁扭转形变量和应变形变量与扭矩的标定关系,外推偏航驱动扭矩,有别于传统测试加装扭矩传感器的方法,直接将偏航驱动系统转化为传感器本身,整体测试方法无需改变原有系统结构,解决了常规检测方法对驱动系统改动较大,工作量繁重及齿轮系效率未知造成测量偏差等缺陷。
一种风电齿轮箱均载测试分析方法及系统.pdf
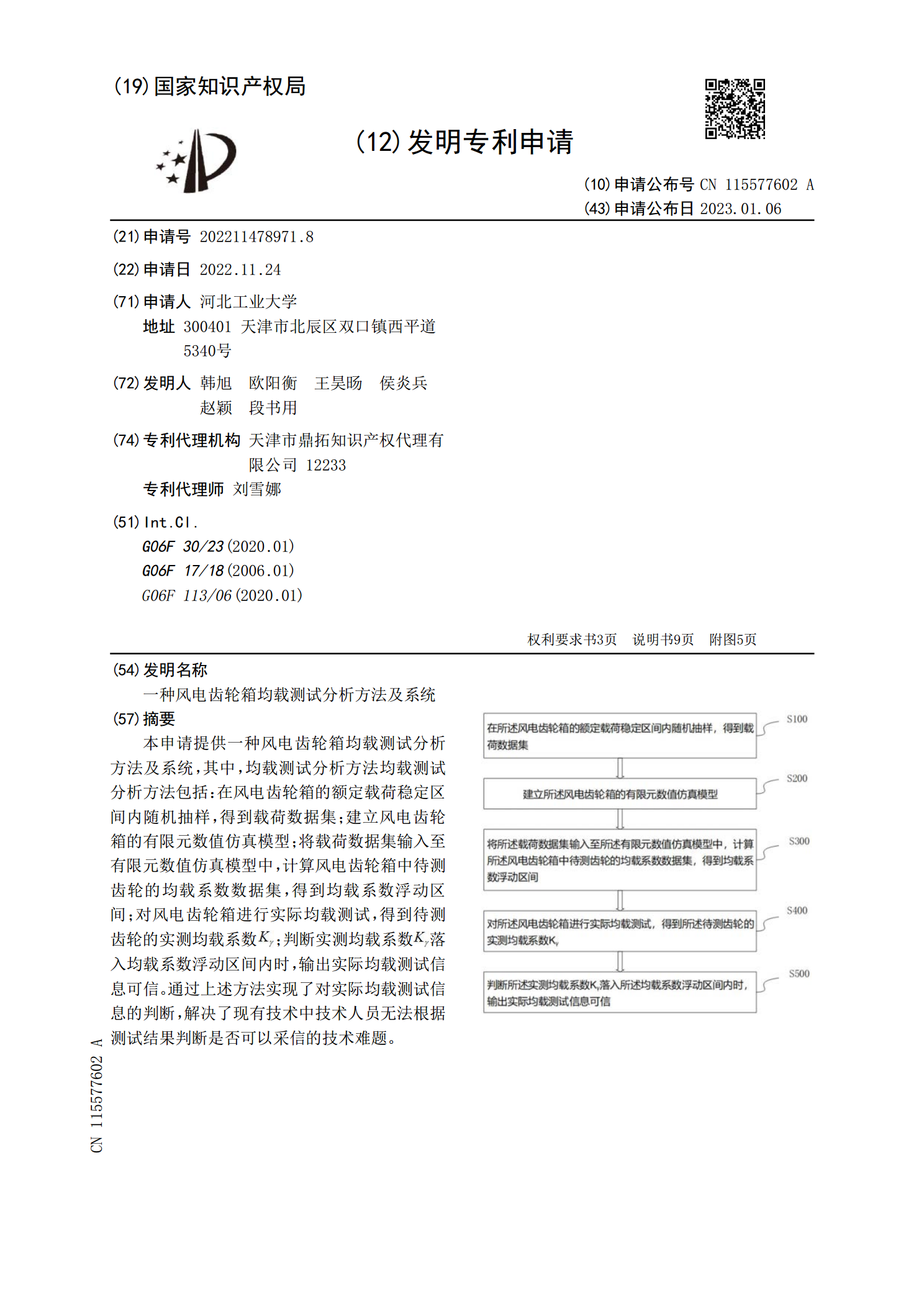
本申请提供一种风电齿轮箱均载测试分析方法及系统,其中,均载测试分析方法均载测试分析方法包括:在风电齿轮箱的额定载荷稳定区间内随机抽样,得到载荷数据集;建立风电齿轮箱的有限元数值仿真模型;将载荷数据集输入至有限元数值仿真模型中,计算风电齿轮箱中待测齿轮的均载系数数据集,得到均载系数浮动区间;对风电齿轮箱进行实际均载测试,得到待测齿轮的实测均载系数

一种发电机组偏航系统和方法及偏航驱动方法.pdf
本发明公开了一种发电机组偏航系统,包括回转支承固定部件和回转支承旋转部件。该系统还包括磁电式偏航驱动系统,其包括分别相对设置在回转支承固定部件和回转支承旋转部件上的定子和转子,以及为转子提供励磁电流的伺服驱动机构,转子在伺服驱动机构作用下相对于定子发生转动,进而带动回转支承旋转部件相对于回转支承固定部件实现偏航。定子和转子采用轴向布置方式设置。还公开了一种发电机组偏航方法及发电机组偏航驱动方法。本发明利用磁电感应原理,实现非接触式偏航动作,替代现有的接触式齿轮啮合偏航驱动动作,极大地提高了偏航系统的使用寿

一种用于风电偏航系统的阻尼装置及风电偏航系统.pdf
一种用于风电偏航系统的阻尼装置,阻尼装置包括:能够锁定风电偏航系统的机舱底座位置的钳式制动器,设置在机舱底座上。设置在风电偏航系统的塔筒上的刹车盘。能够在风电偏航系统发生对风偏转时,和刹车盘发生相对运动从而在刹车盘中产生阻止机舱底座对风偏转的阻尼力的永磁阻尼器,永磁阻尼器对应刹车盘设置。第二方面,本发明还提供一种风电偏航系统。其有益效果是,当机舱底座不偏航时,永磁阻尼器、刹车盘和钳式制动器同时工作,永磁阻尼器和刹车盘用于降低机舱底座对风偏转的速度,钳式制动器用于锁定机舱底座的位置。当机舱底座偏航时,钳式制
一种发电机组偏航驱动系统和方法及发电机组偏航系统.pdf
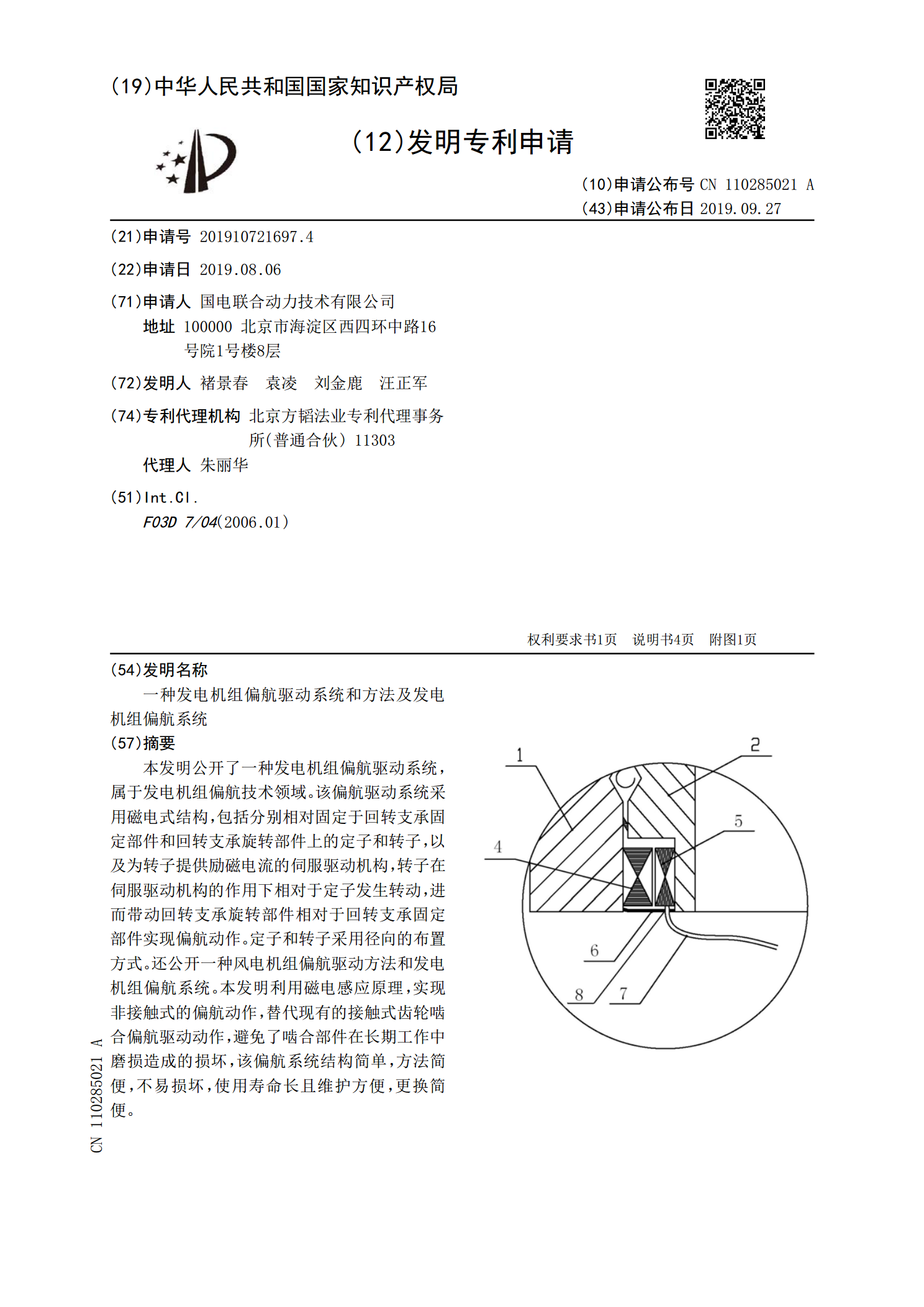
本发明公开了一种发电机组偏航驱动系统,属于发电机组偏航技术领域。该偏航驱动系统采用磁电式结构,包括分别相对固定于回转支承固定部件和回转支承旋转部件上的定子和转子,以及为转子提供励磁电流的伺服驱动机构,转子在伺服驱动机构的作用下相对于定子发生转动,进而带动回转支承旋转部件相对于回转支承固定部件实现偏航动作。定子和转子采用径向的布置方式。还公开一种风电机组偏航驱动方法和发电机组偏航系统。本发明利用磁电感应原理,实现非接触式的偏航动作,替代现有的接触式齿轮啮合偏航驱动动作,避免了啮合部件在长期工作中磨损造成的损