
循迹机器人、循迹行驶控制方法、系统及介质.pdf

春岚****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

循迹机器人、循迹行驶控制方法、系统及介质.pdf
本发明实施例公开了一种循迹机器人、循迹行驶控制方法、系统及介质。循迹行驶控制方法基于循迹机器人执行,该方法包括:根据第一探头的检测信号,确定第一探头是否检测到轨迹线;根据第一探头的检测结果,控制关于第一探头左右对称的第一轮子和第二轮子,使两轮的行驶模式在左转模式与右转模式之间进行转换,其中,行驶模式中两轮的转速差值为预设的初始差值,初始差值小于两轮的转速差值的最大差值。通过根据第一探头的检测结果转换左转模式和右转模式,从而使循迹机器人的行驶路线与轨迹线更加吻合,并通过控制两轮的转速差值的初始差值小于最大差
一种智能循迹机器人、系统及控制方法.pdf
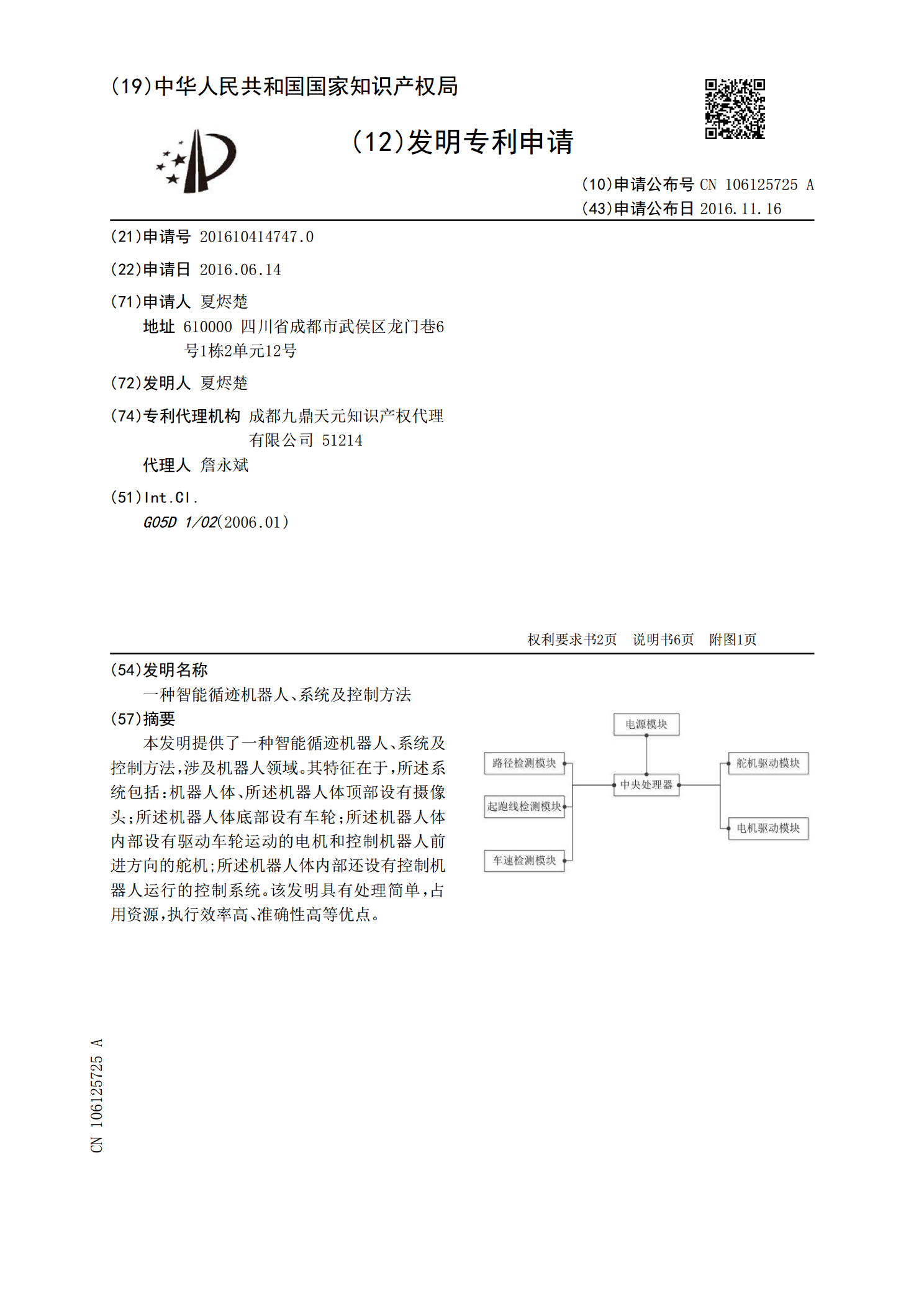
本发明提供了一种智能循迹机器人、系统及控制方法,涉及机器人领域。其特征在于,所述系统包括:机器人体、所述机器人体顶部设有摄像头;所述机器人体底部设有车轮;所述机器人体内部设有驱动车轮运动的电机和控制机器人前进方向的舵机;所述机器人体内部还设有控制机器人运行的控制系统。该发明具有处理简单,占用资源,执行效率高、准确性高等优点。

一种机器人循迹方法及存储介质.pdf
本发明公布一种机器人循迹方法及存储介质,机器人循迹方法包括如下步骤:获取用户输入的循迹路线以及目标点;确定机器人当前位置到所述循迹路线上最近的第一循迹点以及所述目标点到所述循迹路线上最近的第二循迹点,获取第一路线、第二路线和第三路线;判断所述第一路线与所述第二路线的路程总和是否大于所述第三路线的路程,若是则机器人的行驶路线为所述第三路线,若否则机器人的行驶路线为所述第一路线、循迹路线上沿着所述第一循迹点到所述第二循迹点的路线、所述第二路线。上述技术方案,机器人行走的效率高效,行走得更加流畅,不会出现行走缓
定轨循迹车系统及定轨循迹方法.pdf
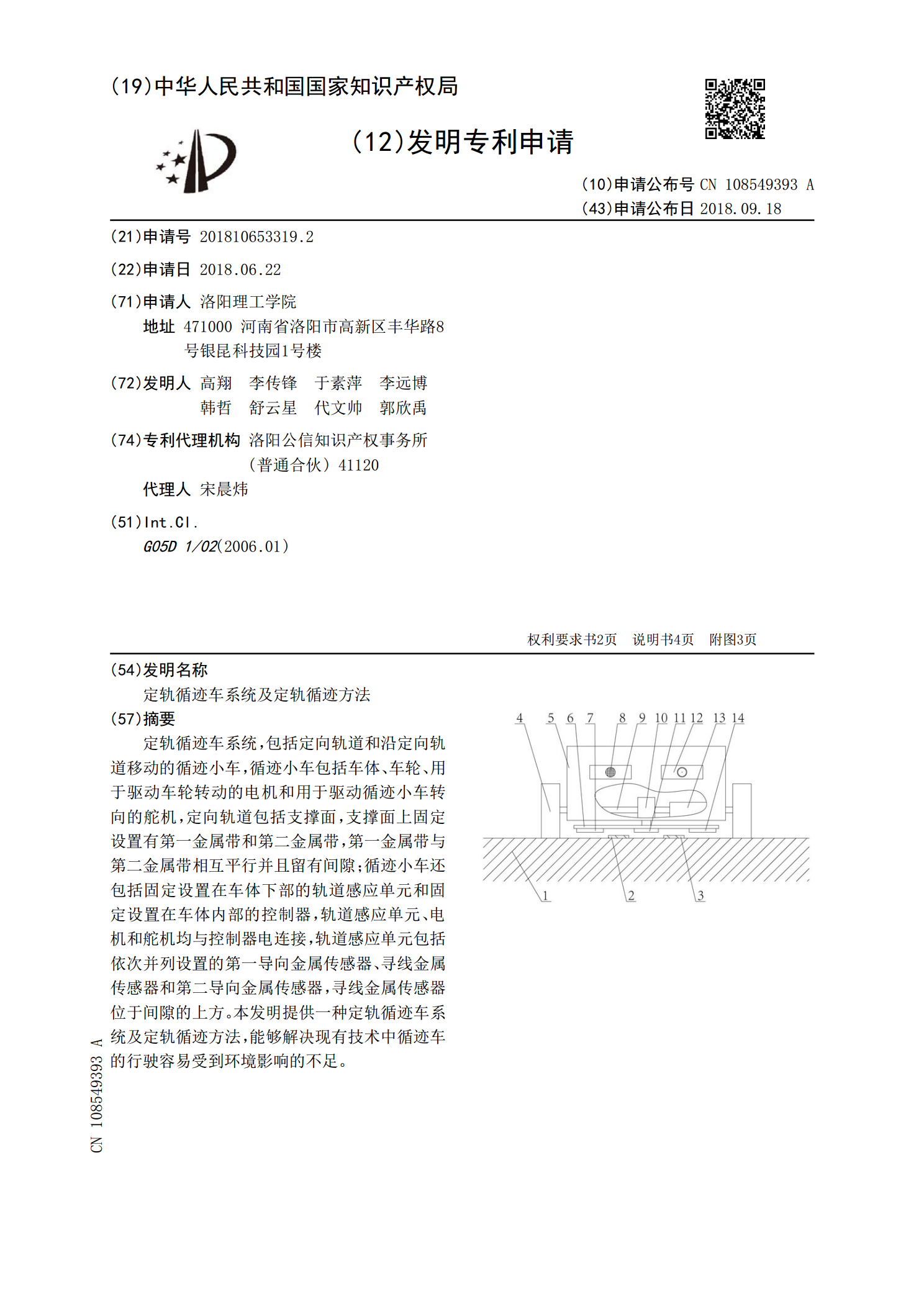
定轨循迹车系统,包括定向轨道和沿定向轨道移动的循迹小车,循迹小车包括车体、车轮、用于驱动车轮转动的电机和用于驱动循迹小车转向的舵机,定向轨道包括支撑面,支撑面上固定设置有第一金属带和第二金属带,第一金属带与第二金属带相互平行并且留有间隙;循迹小车还包括固定设置在车体下部的轨道感应单元和固定设置在车体内部的控制器,轨道感应单元、电机和舵机均与控制器电连接,轨道感应单元包括依次并列设置的第一导向金属传感器、寻线金属传感器和第二导向金属传感器,寻线金属传感器位于间隙的上方。本发明提供一种定轨循迹车系统及定轨循迹

循迹机器人控制系统的软硬件设计.docx
循迹机器人控制系统的软硬件设计循迹机器人控制系统的软硬件设计摘要:循迹机器人是一种能够自动沿着指定轨迹移动的机器人。本文将重点探讨循迹机器人控制系统的软硬件设计。首先,我们将介绍循迹机器人的基本原理和应用场景。然后,我们将详细讨论循迹机器人控制系统的软件设计和硬件设计,并提出一种综合的设计方案。最后,我们将总结本文的主要内容,并展望未来的研究方向。关键词:循迹机器人,控制系统,软件设计,硬件设计,设计方案1.引言循迹机器人是一种能够自动识别和跟踪特定路径的机器人。它可以应用于许多领域,包括工业生产、仓储物