
无侧隙滚子包络环面蜗杆传动机构及环面蜗杆齿面建模方法.pdf

贤惠****66

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无侧隙滚子包络环面蜗杆传动机构及环面蜗杆齿面建模方法.pdf
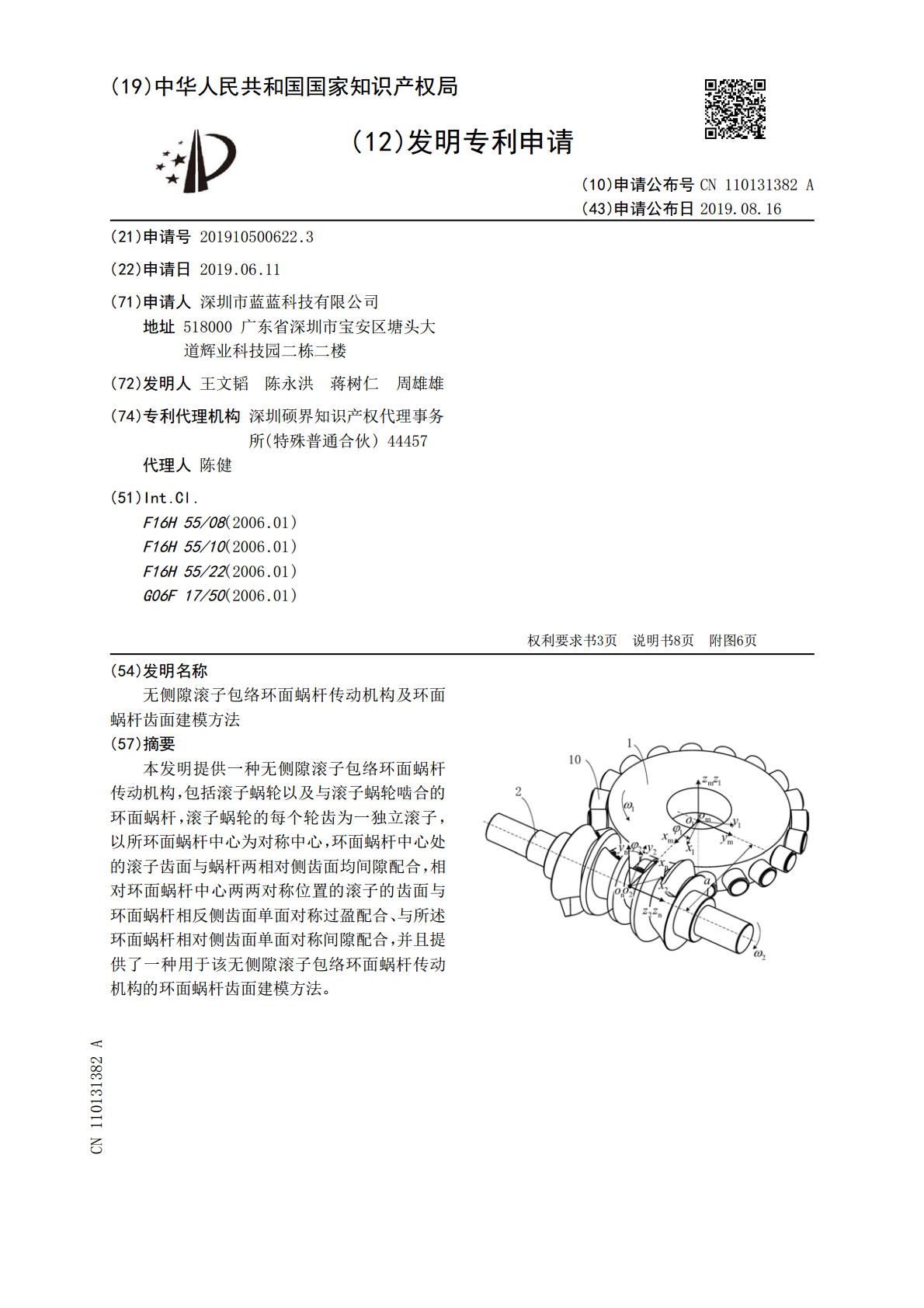
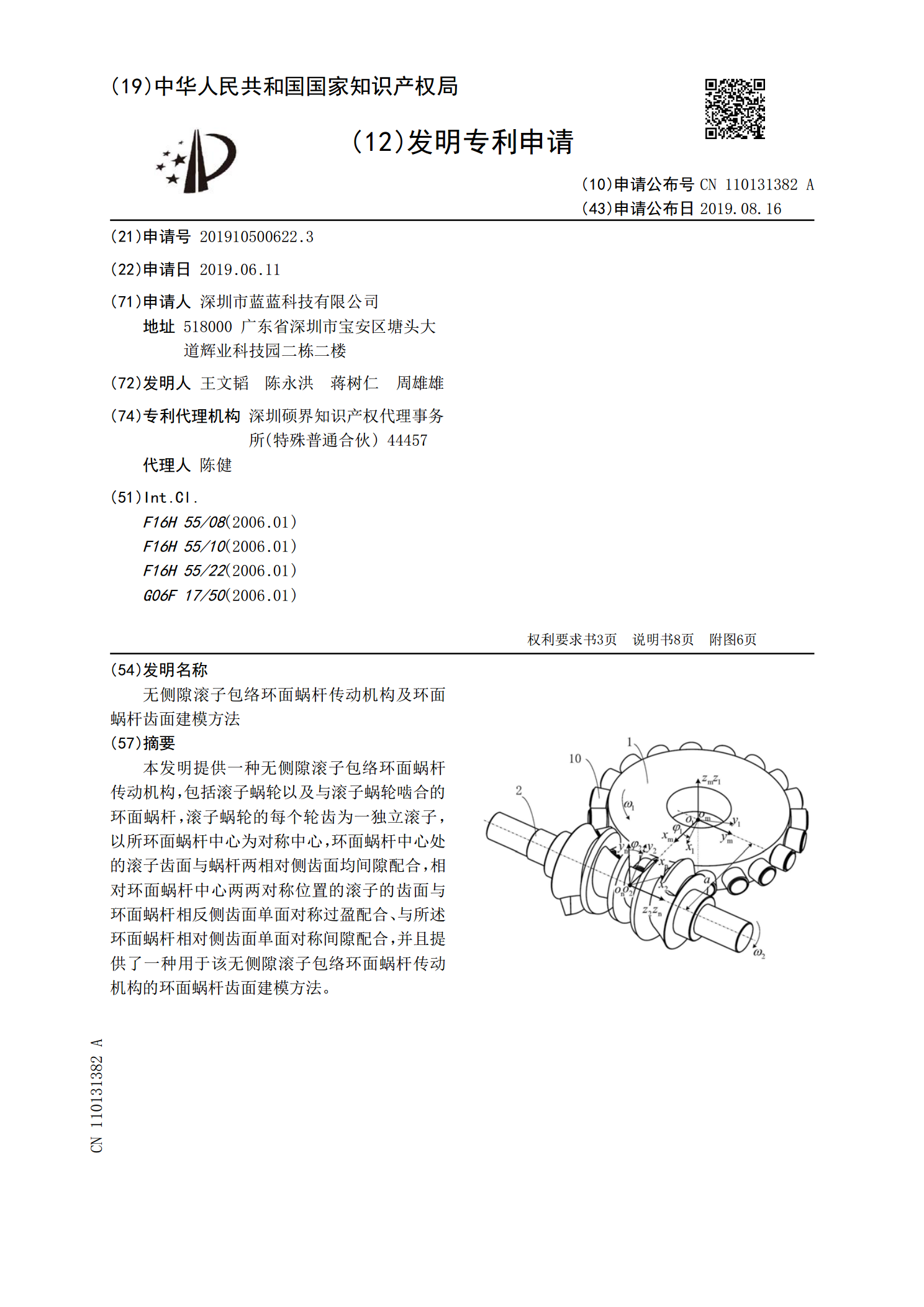
本发明提供一种无侧隙滚子包络环面蜗杆传动机构,包括滚子蜗轮以及与滚子蜗轮啮合的环面蜗杆,滚子蜗轮的每个轮齿为一独立滚子,以所环面蜗杆中心为对称中心,环面蜗杆中心处的滚子齿面与蜗杆两相对侧齿面均间隙配合,相对环面蜗杆中心两两对称位置的滚子的齿面与环面蜗杆相反侧齿面单面对称过盈配合、与所述环面蜗杆相对侧齿面单面对称间隙配合,并且提供了一种用于该无侧隙滚子包络环面蜗杆传动机构的环面蜗杆齿面建模方法。
无侧隙阶梯滚柱包络环面蜗杆传动.pdf
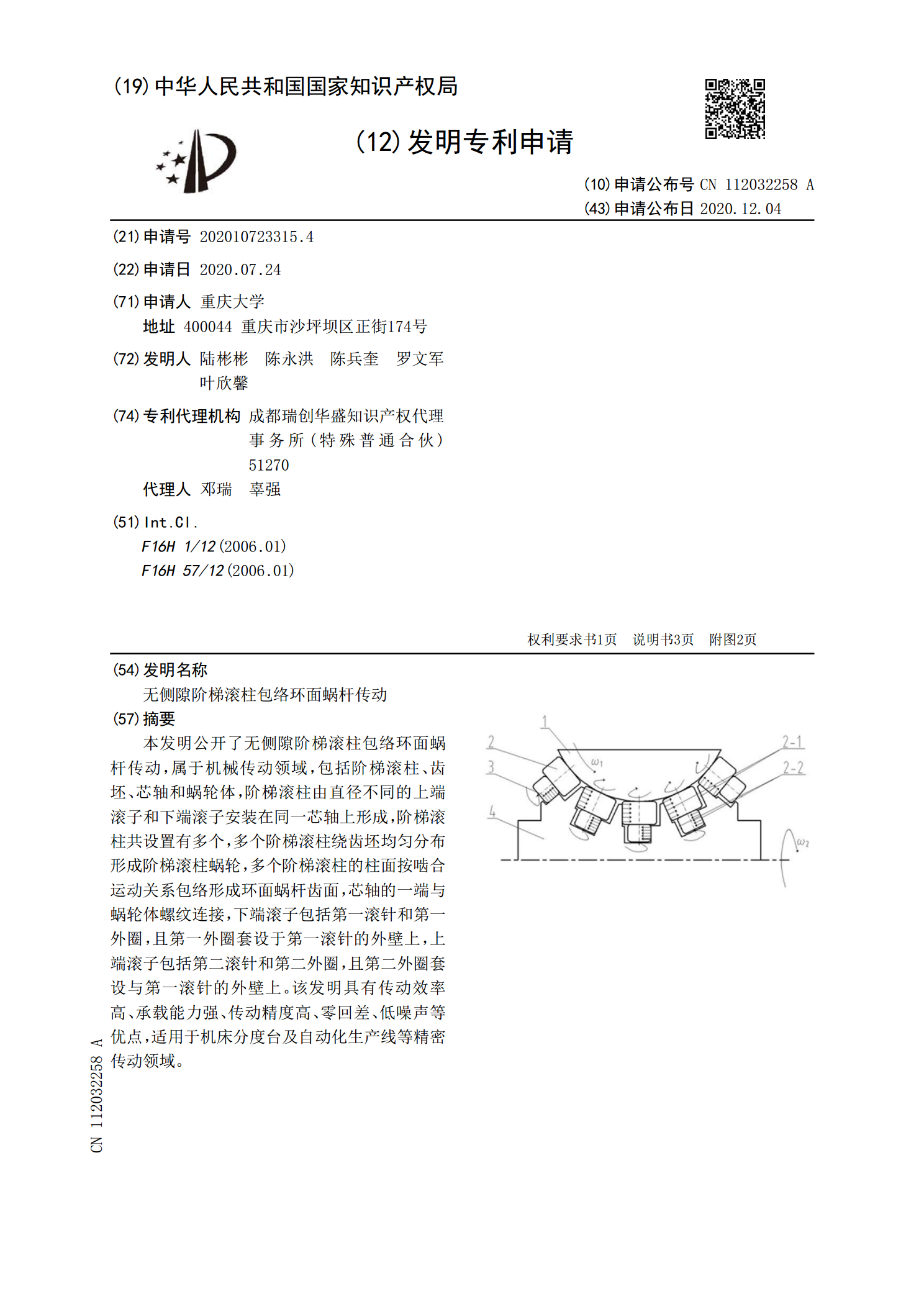
本发明公开了无侧隙阶梯滚柱包络环面蜗杆传动,属于机械传动领域,包括阶梯滚柱、齿坯、芯轴和蜗轮体,阶梯滚柱由直径不同的上端滚子和下端滚子安装在同一芯轴上形成,阶梯滚柱共设置有多个,多个阶梯滚柱绕齿坯均匀分布形成阶梯滚柱蜗轮,多个阶梯滚柱的柱面按啮合运动关系包络形成环面蜗杆齿面,芯轴的一端与蜗轮体螺纹连接,下端滚子包括第一滚针和第一外圈,且第一外圈套设于第一滚针的外壁上,上端滚子包括第二滚针和第二外圈,且第二外圈套设与第一滚针的外壁上。该发明具有传动效率高、承载能力强、传动精度高、零回差、低噪声等优点,适用于

无侧隙双滚子包络环面蜗杆传动的理论研究的中期报告.docx
无侧隙双滚子包络环面蜗杆传动的理论研究的中期报告一、研究背景与意义无侧隙双滚子包络环面蜗杆传动是一种高效、低噪声、低振动、高精度的传动装置,适用于工业、航空航天、军事等领域。目前国外已经研发成功并已开始实际应用,国内也开始引起重视。该传动装置以其独特的结构和运动方式,与传统的蜗杆传动相比,具有更高的传动效率、更小的侧隙和更宽的传动范围,对提高系统的可靠性、精度和寿命具有重要意义。二、研究内容和方法本研究旨在对无侧隙双滚子包络环面蜗杆传动的理论、设计、制造及其应用展开全面的研究。具体研究内容如下:1.滚子包

无侧隙双滚子包络环面蜗杆传动系统动力学研究的中期报告.docx
无侧隙双滚子包络环面蜗杆传动系统动力学研究的中期报告该研究的目的是基于无侧隙双滚子包络环面蜗杆传动系统,对其动力学特性进行研究。本中期报告主要介绍了该研究的研究背景、研究方法、进展情况及预期成果。1.研究背景蜗杆传动系统广泛应用于航空、轨道交通、机械制造等领域。现有的蜗杆传动系统存在很多不足,如传动效率低、噪声大、易磨损等。基于此,无侧隙双滚子包络环面蜗杆传动系统被提出,其具有传动效率高、噪声低、磨损小等优点。但其动力学特性还需要进一步研究。2.研究方法本研究采用数学模型和计算机仿真相结合的方法进行研究。
平面二次包络环面蜗杆传动蜗轮滚刀齿廓建模方法.pdf
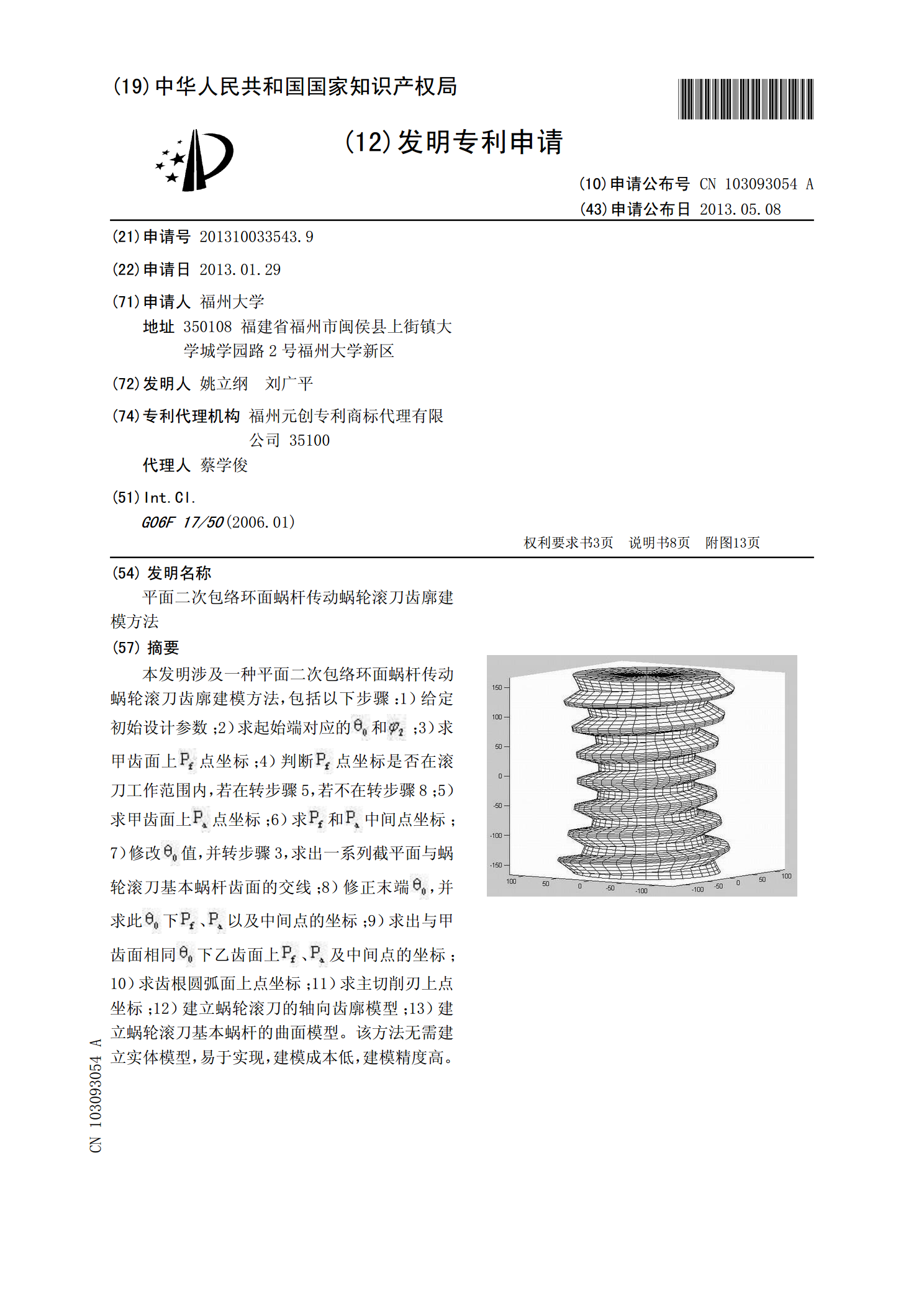
本发明涉及一种平面二次包络环面蜗杆传动蜗轮滚刀齿廓建模方法,包括以下步骤:1)给定初始设计参数;2)求起始端对应的和;3)求甲齿面上点坐标;4)判断点坐标是否在滚刀工作范围内,若在转步骤5,若不在转步骤8;5)求甲齿面上点坐标;6)求和中间点坐标;7)修改值,并转步骤3,求出一系列截平面与蜗轮滚刀基本蜗杆齿面的交线;8)修正末端,并求此下、以及中间点的坐标;9)求出与甲齿面相同下乙齿面上、及中间点的坐标;10)求齿根圆弧面上点坐标;11)求主切削刃上点坐标;12)建立蜗轮滚刀的轴向齿廓模型;13)建立蜗轮