
一种链轮式边模库装置.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种链轮式边模库装置.pdf
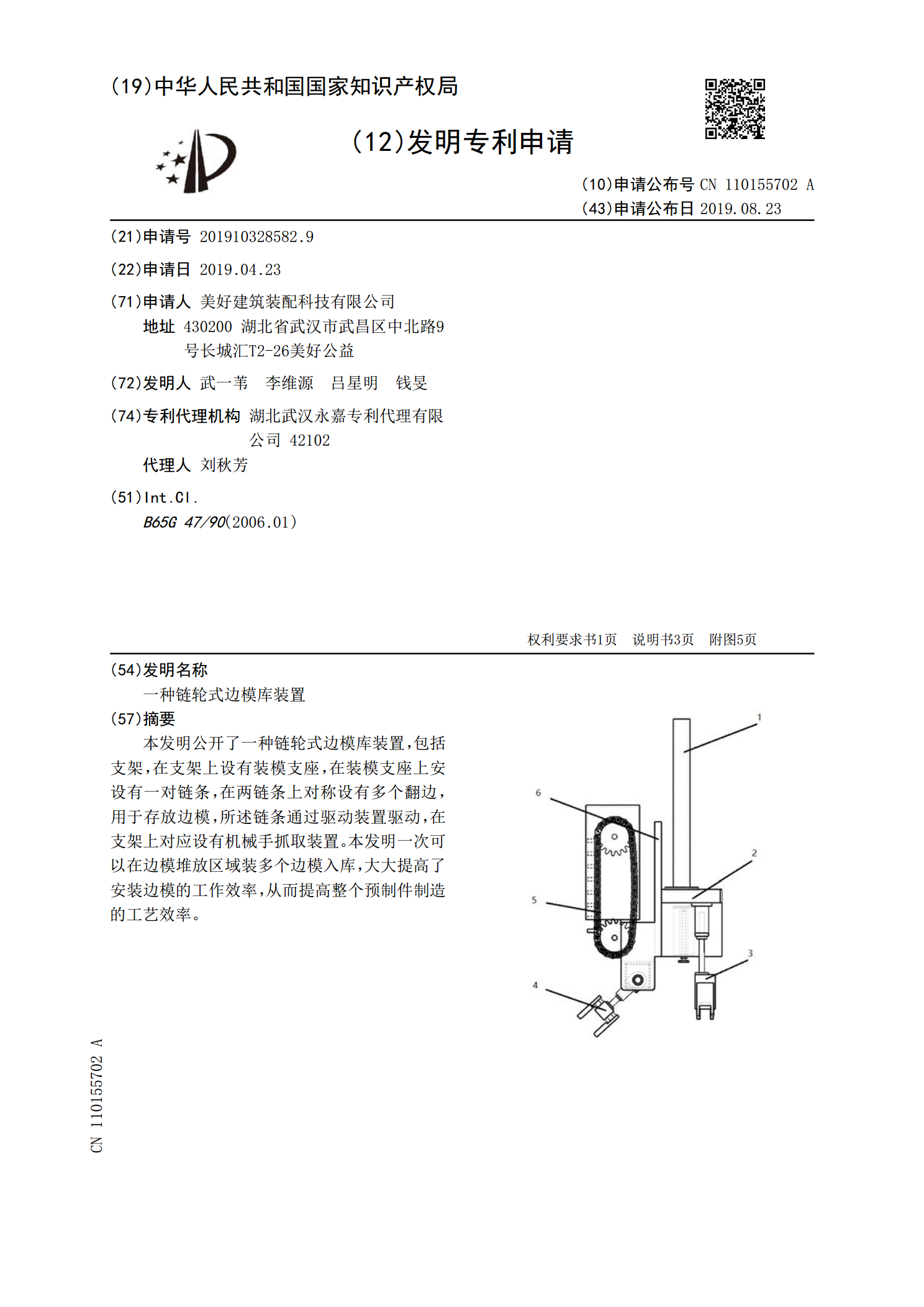
本发明公开了一种链轮式边模库装置,包括支架,在支架上设有装模支座,在装模支座上安设有一对链条,在两链条上对称设有多个翻边,用于存放边模,所述链条通过驱动装置驱动,在支架上对应设有机械手抓取装置。本发明一次可以在边模堆放区域装多个边模入库,大大提高了安装边模的工作效率,从而提高整个预制件制造的工艺效率。

一种混凝土预制构件弹匣式边模库装置.pdf
本发明公开了一种混凝土预制构件弹匣式边模库装置,其特征在于:包括呈左右对称设置的移动架,在移动架上从上至下间隔设有支杆,所述支杆的内端与移动架固连,外端与通止规滑移连接,在支杆上设置的限位件与通止规之间套装有弹性件,使通止规可以沿支杆的端头滑移并通过弹性件复位,所述通止规的外端头的上端面为用于支撑边模的支撑面,外侧部为与边模相接触的斜面或斜曲面,所述移动架通过驱动装置驱动。本发明一次可以在边模堆放区域装多个边模入库,从而提高整个预制件制造的工艺节拍;机械手和本发明的配合作用可以实现准确高效的装模动作及卸模
一种滚轮式纱网边布折叠导向装置.pdf
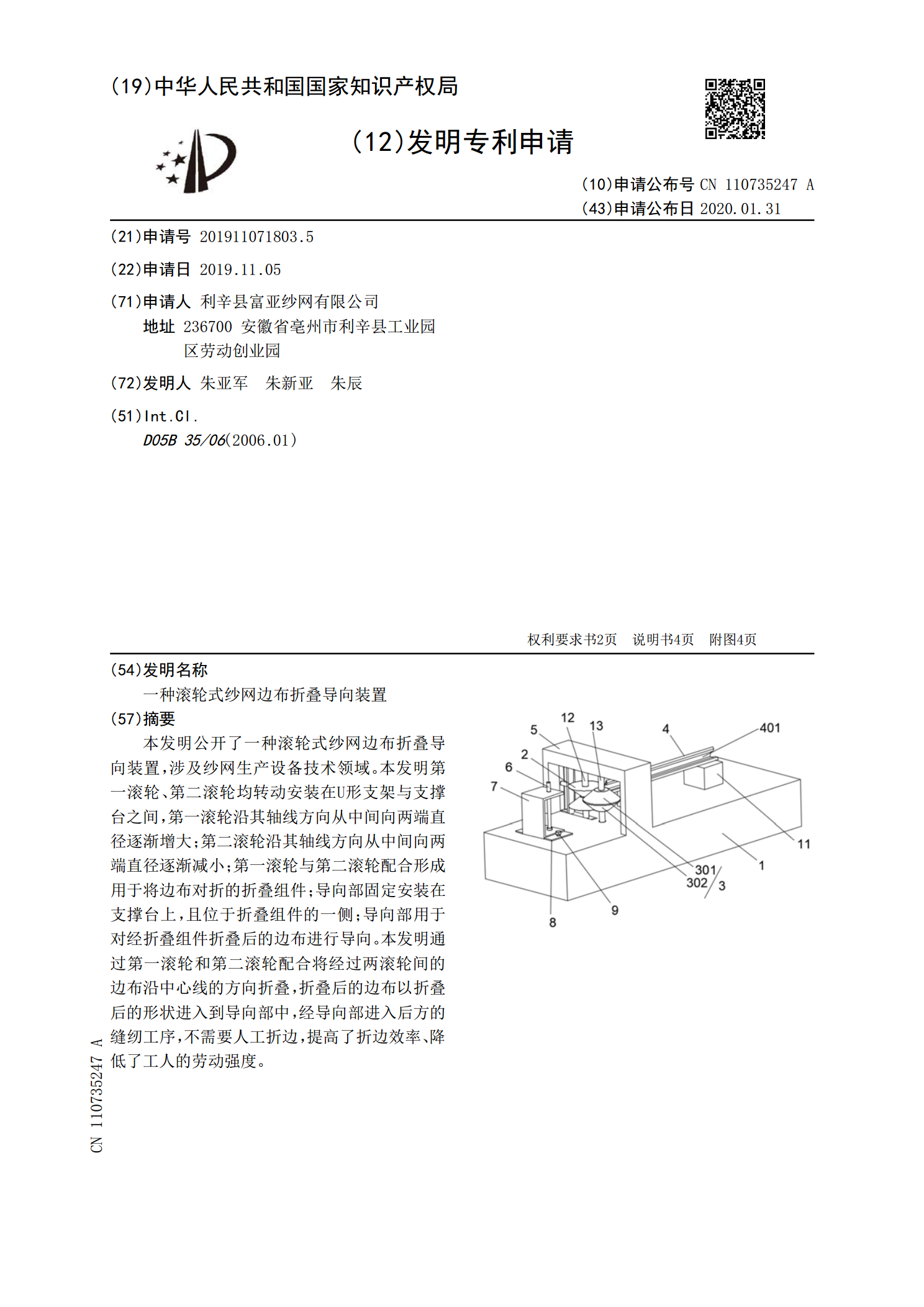
本发明公开了一种滚轮式纱网边布折叠导向装置,涉及纱网生产设备技术领域。本发明第一滚轮、第二滚轮均转动安装在U形支架与支撑台之间,第一滚轮沿其轴线方向从中间向两端直径逐渐增大;第二滚轮沿其轴线方向从中间向两端直径逐渐减小;第一滚轮与第二滚轮配合形成用于将边布对折的折叠组件;导向部固定安装在支撑台上,且位于折叠组件的一侧;导向部用于对经折叠组件折叠后的边布进行导向。本发明通过第一滚轮和第二滚轮配合将经过两滚轮间的边布沿中心线的方向折叠,折叠后的边布以折叠后的形状进入到导向部中,经导向部进入后方的缝纫工序,不需
一种注塑模具的凸轮式开模装置.pdf
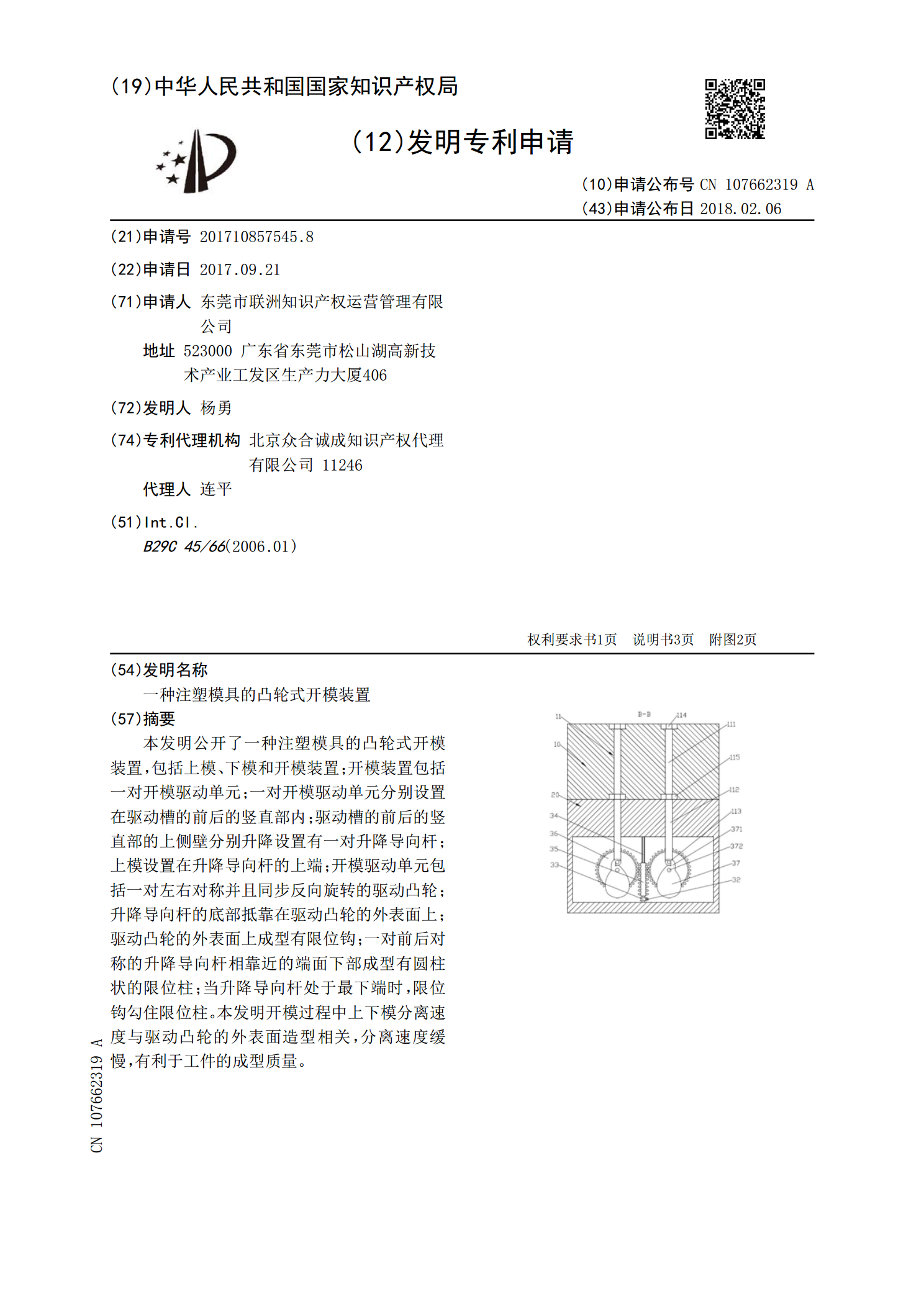
本发明公开了一种注塑模具的凸轮式开模装置,包括上模、下模和开模装置;开模装置包括一对开模驱动单元;一对开模驱动单元分别设置在驱动槽的前后的竖直部内;驱动槽的前后的竖直部的上侧壁分别升降设置有一对升降导向杆;上模设置在升降导向杆的上端;开模驱动单元包括一对左右对称并且同步反向旋转的驱动凸轮;升降导向杆的底部抵靠在驱动凸轮的外表面上;驱动凸轮的外表面上成型有限位钩;一对前后对称的升降导向杆相靠近的端面下部成型有圆柱状的限位柱;当升降导向杆处于最下端时,限位钩勾住限位柱。本发明开模过程中上下模分离速度与驱动凸轮

一种外置轮式梯级链.pdf
本发明涉及一种电梯梯级部件,尤其涉及一种外置轮式梯级链。包括梯级链,链轴,所述的梯级链之间布置链轴,还包括外置滚轮,所述的外置滚轮布置在梯级链之间并与链轴相铰接。本发明提供的外置轮式梯级链,去除了梯级链中的梯级轮,在链轴上放置滚轮来代替梯级轮,如果滚轮需要更换或维修,则只需要更换外置轮即可,无需更换安装好的梯级链,方便维保,降低成本。