
基于智能助力的制动控制方法、系统、设备及存储介质.pdf

霞英****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于智能助力的制动控制方法、系统、设备及存储介质.pdf
本发明提供了一种基于智能助力的制动控制方法、系统、设备及存储介质,该方法包括以下步骤:接收到制动信号;获取所述电动汽车的车速和后车轮的轮速数据;根据后车轮的所述轮速数据以及轮速和轮缸制动力矩的对应关系计算轮缸制动力矩的控制目标值;根据所述控制目标值获得所述后轴制动力;根据所述车速和所述后轴制动力获得所述前轴制动力;根据获得的所述后轴制动力和所述前轴制动力控制所述电动助力系统,以使得所述电动助力系统驱动所述液压制动系统。本发明的制动控制方法在制动过程中,通过电子制动力分配使得前后轴均存在制动压力,实现后轮防
基于电动助力的制动控制方法、系统、设备及存储介质.pdf
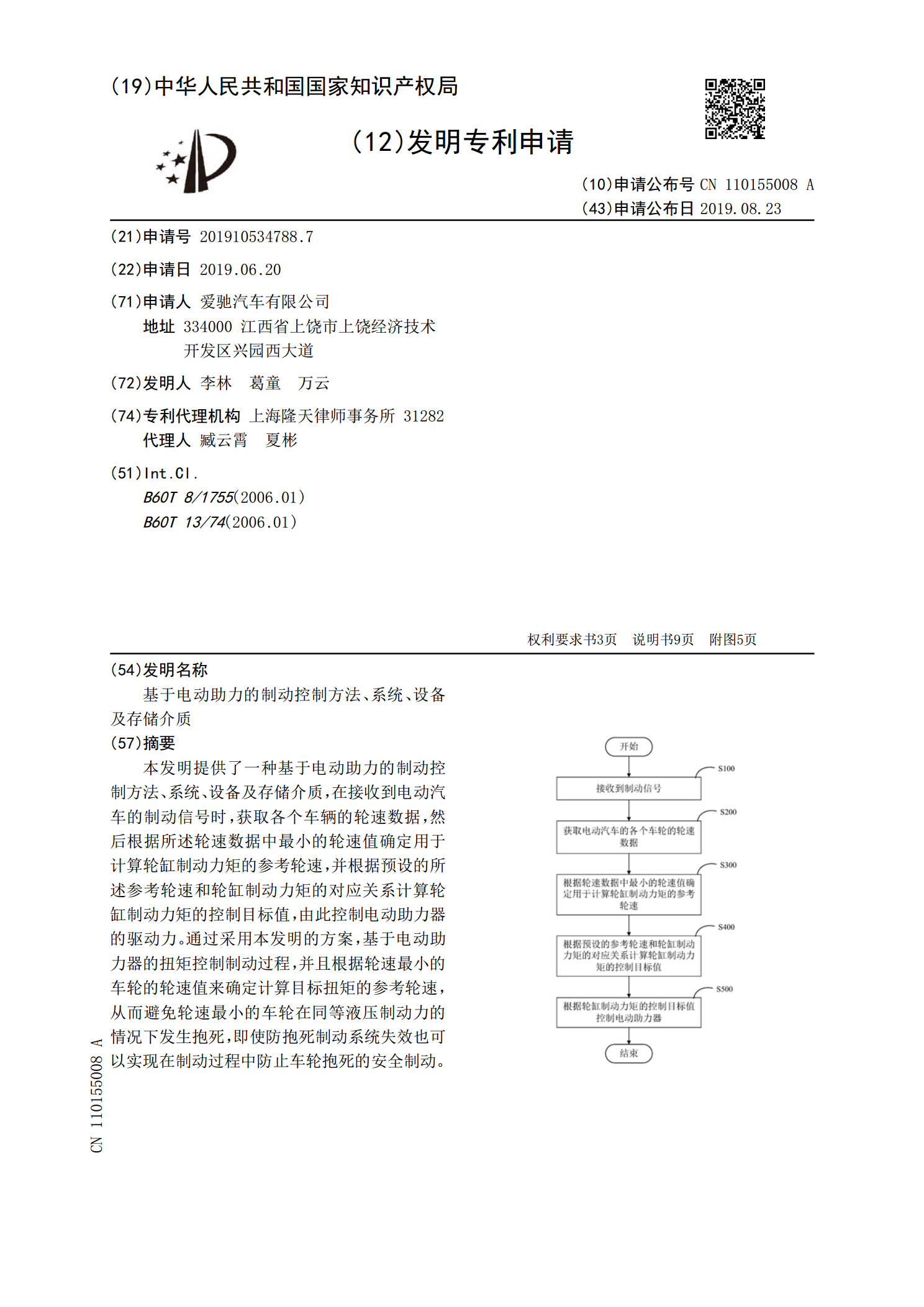
本发明提供了一种基于电动助力的制动控制方法、系统、设备及存储介质,在接收到电动汽车的制动信号时,获取各个车辆的轮速数据,然后根据所述轮速数据中最小的轮速值确定用于计算轮缸制动力矩的参考轮速,并根据预设的所述参考轮速和轮缸制动力矩的对应关系计算轮缸制动力矩的控制目标值,由此控制电动助力器的驱动力。通过采用本发明的方案,基于电动助力器的扭矩控制制动过程,并且根据轮速最小的车轮的轮速值来确定计算目标扭矩的参考轮速,从而避免轮速最小的车轮在同等液压制动力的情况下发生抱死,即使防抱死制动系统失效也可以实现在制动过程
基于电动助力的停车控制方法、系统、设备及存储介质.pdf
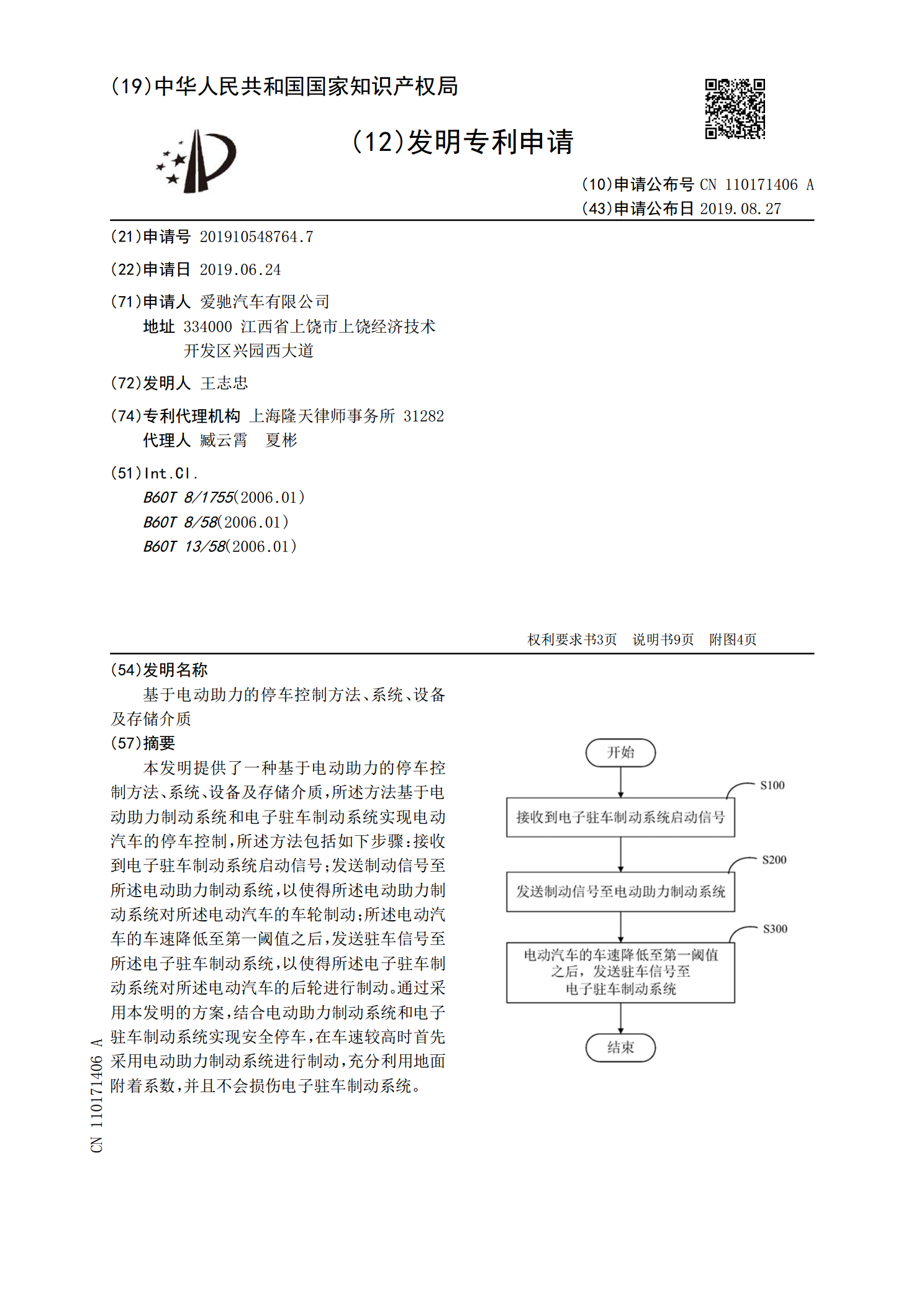
本发明提供了一种基于电动助力的停车控制方法、系统、设备及存储介质,所述方法基于电动助力制动系统和电子驻车制动系统实现电动汽车的停车控制,所述方法包括如下步骤:接收到电子驻车制动系统启动信号;发送制动信号至所述电动助力制动系统,以使得所述电动助力制动系统对所述电动汽车的车轮制动;所述电动汽车的车速降低至第一阈值之后,发送驻车信号至所述电子驻车制动系统,以使得所述电子驻车制动系统对所述电动汽车的后轮进行制动。通过采用本发明的方案,结合电动助力制动系统和电子驻车制动系统实现安全停车,在车速较高时首先采用电动助力

行车制动控制方法、系统、设备及存储介质.pdf
本发明提供了一种行车制动控制方法、系统、设备及存储介质,所述方法包括步骤:获取本车与前方车辆各自的行驶状态信息,以及本车和前方车辆的当前距离;依据本车与前方车辆各自的行驶状态信息,获取本车的预计安全车距;依据本车的预计安全车距,以及本车和前方车辆的当前距离,获取本车的安全系数;依据本车的安全系数,以及预设的安全系数和推杆间隙曲线之间的映射关系,获取本车当前状态下的推杆间隙;依据该推杆间隙,控制输出推杆沿输入推杆的运动行程方向向靠近输入推杆的一侧进行移动;当采集到本车制动踏板产生位移信号,依据位移信号对轮缸
巡航制动系统的控制方法、装置、设备及存储介质.pdf
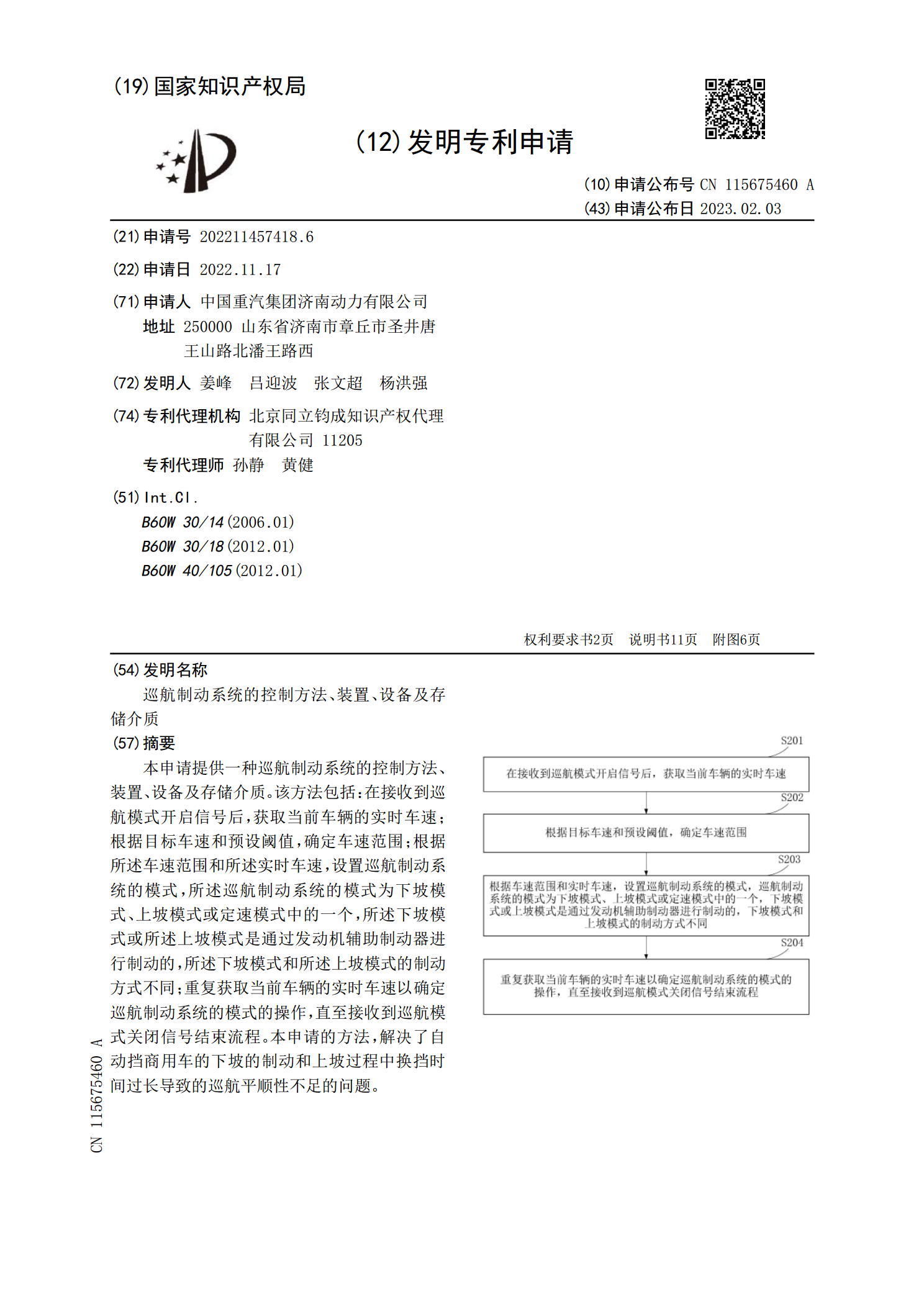
本申请提供一种巡航制动系统的控制方法、装置、设备及存储介质。该方法包括:在接收到巡航模式开启信号后,获取当前车辆的实时车速;根据目标车速和预设阈值,确定车速范围;根据所述车速范围和所述实时车速,设置巡航制动系统的模式,所述巡航制动系统的模式为下坡模式、上坡模式或定速模式中的一个,所述下坡模式或所述上坡模式是通过发动机辅助制动器进行制动的,所述下坡模式和所述上坡模式的制动方式不同;重复获取当前车辆的实时车速以确定巡航制动系统的模式的操作,直至接收到巡航模式关闭信号结束流程。本申请的方法,解决了自动挡商用车的