
智能搬运小车.pdf

雨巷****轶丽

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能搬运小车.doc
(完整word)智能搬运小车(完整word)智能搬运小车(完整word)智能搬运小车本科生毕业设计(论文)智能搬运小车TheSubjectofGraduationProject学生姓名专业光信息科学与技术学号指导教师分院光电科学2014年6月摘要本设计采用STC12C5A60S2单片机为简易智能小车的核心器件。循迹模块由4对红外收发管组成,通过反射红外线的变化判断黑线的有无以达到循迹的功能,电机驱动模块选用H桥驱动芯片L298N结合单片机来控制电机工作。避障模块由两对红外发光管组成.搬运模块
智能搬运小车.pdf
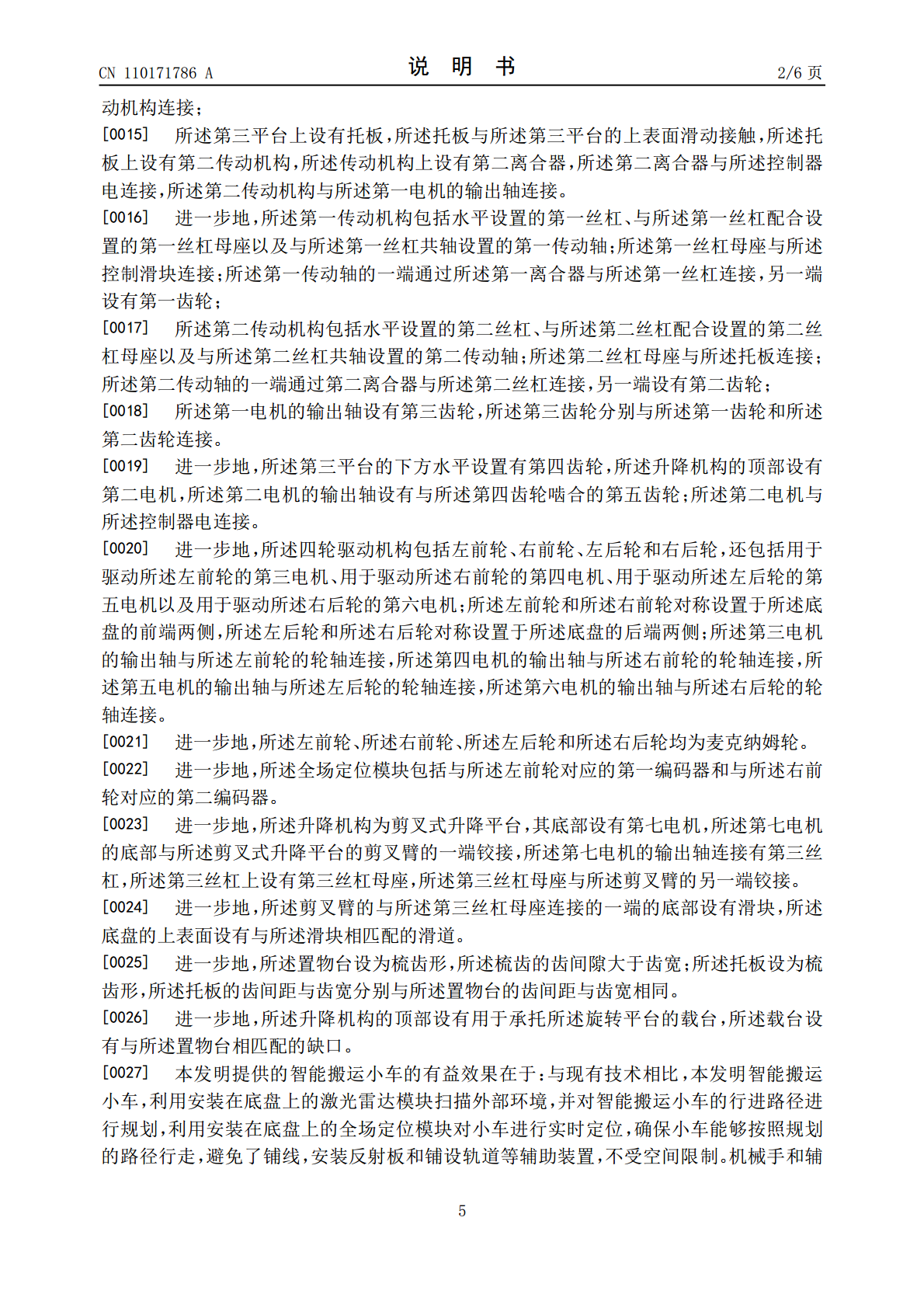
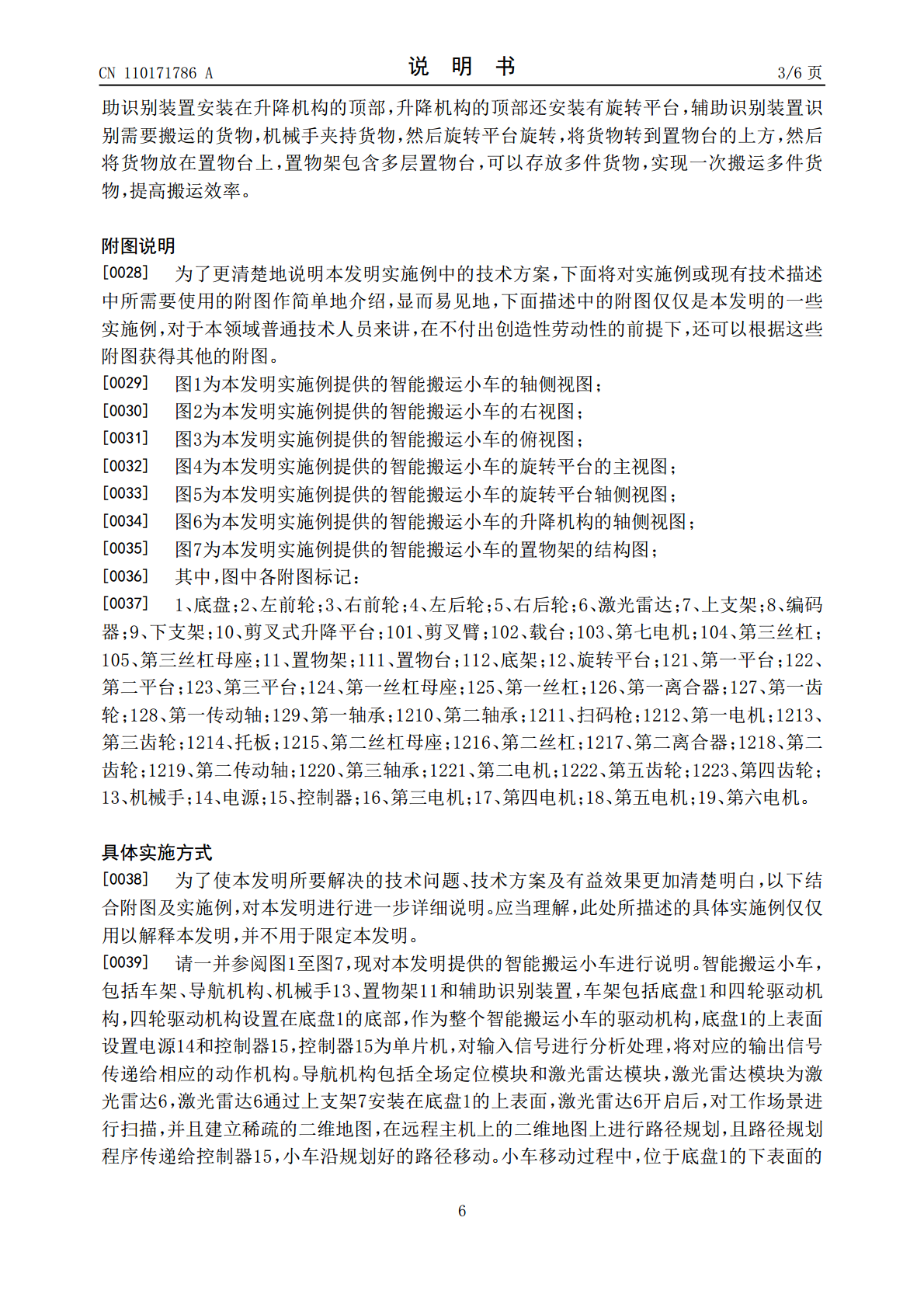
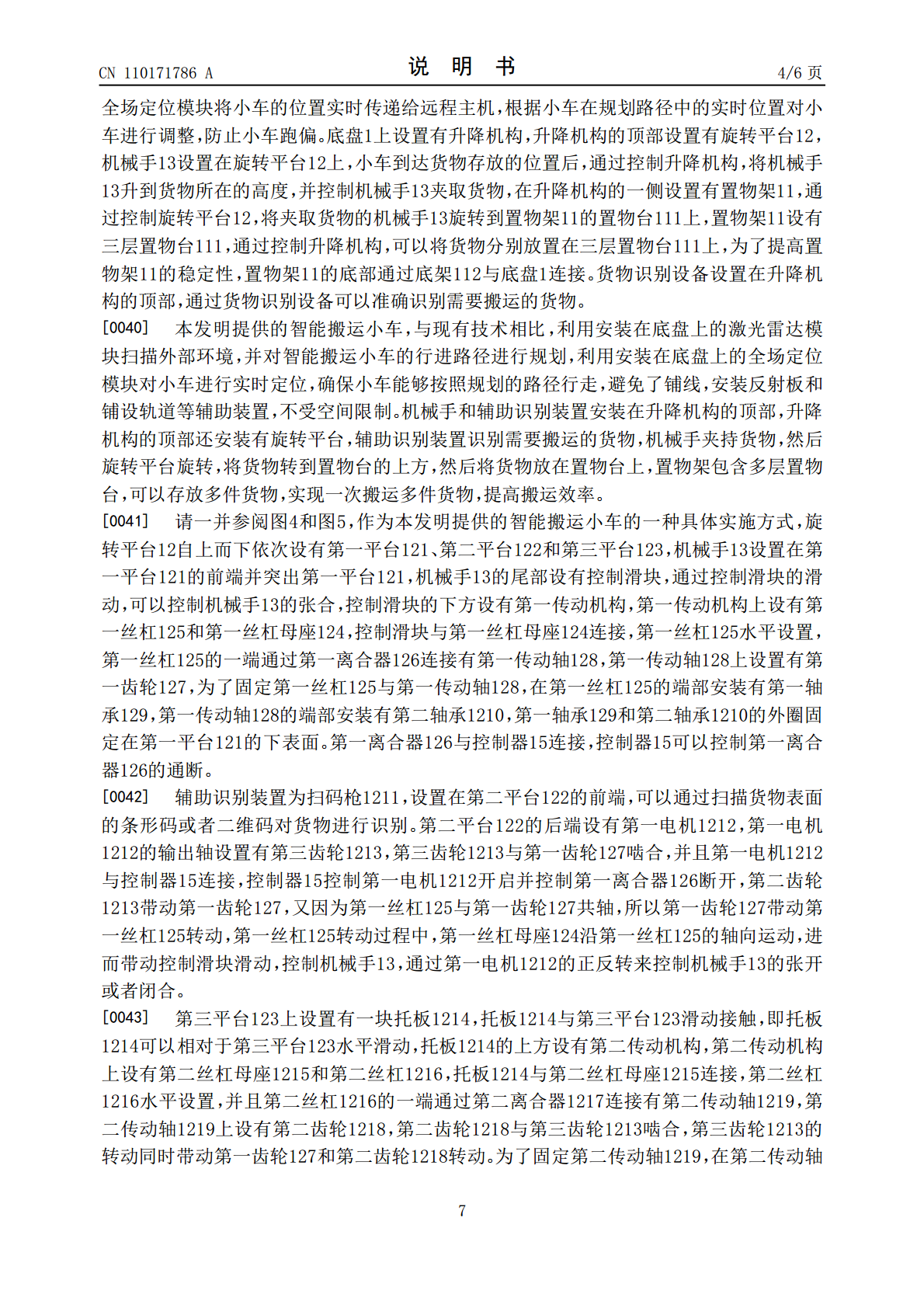
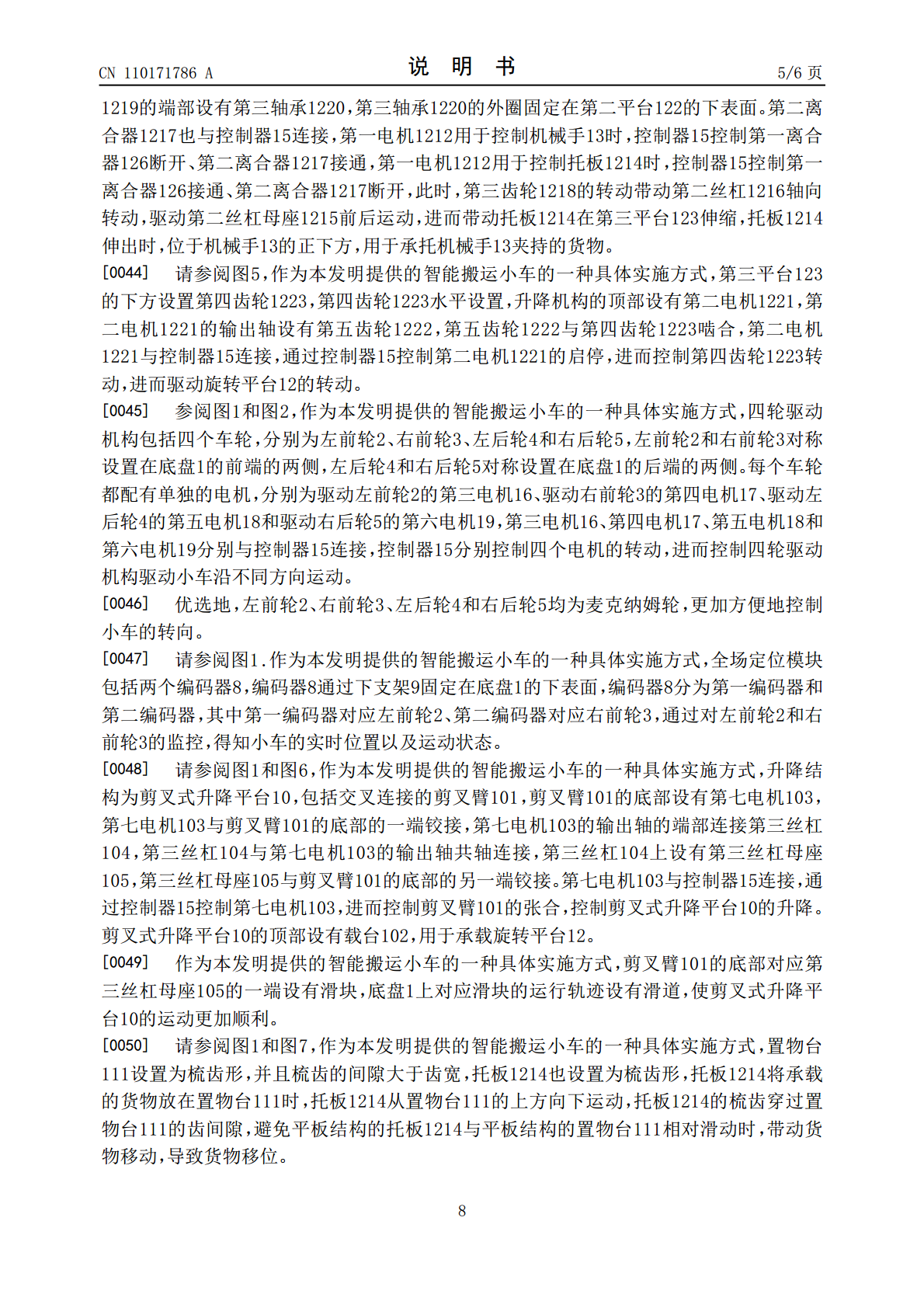
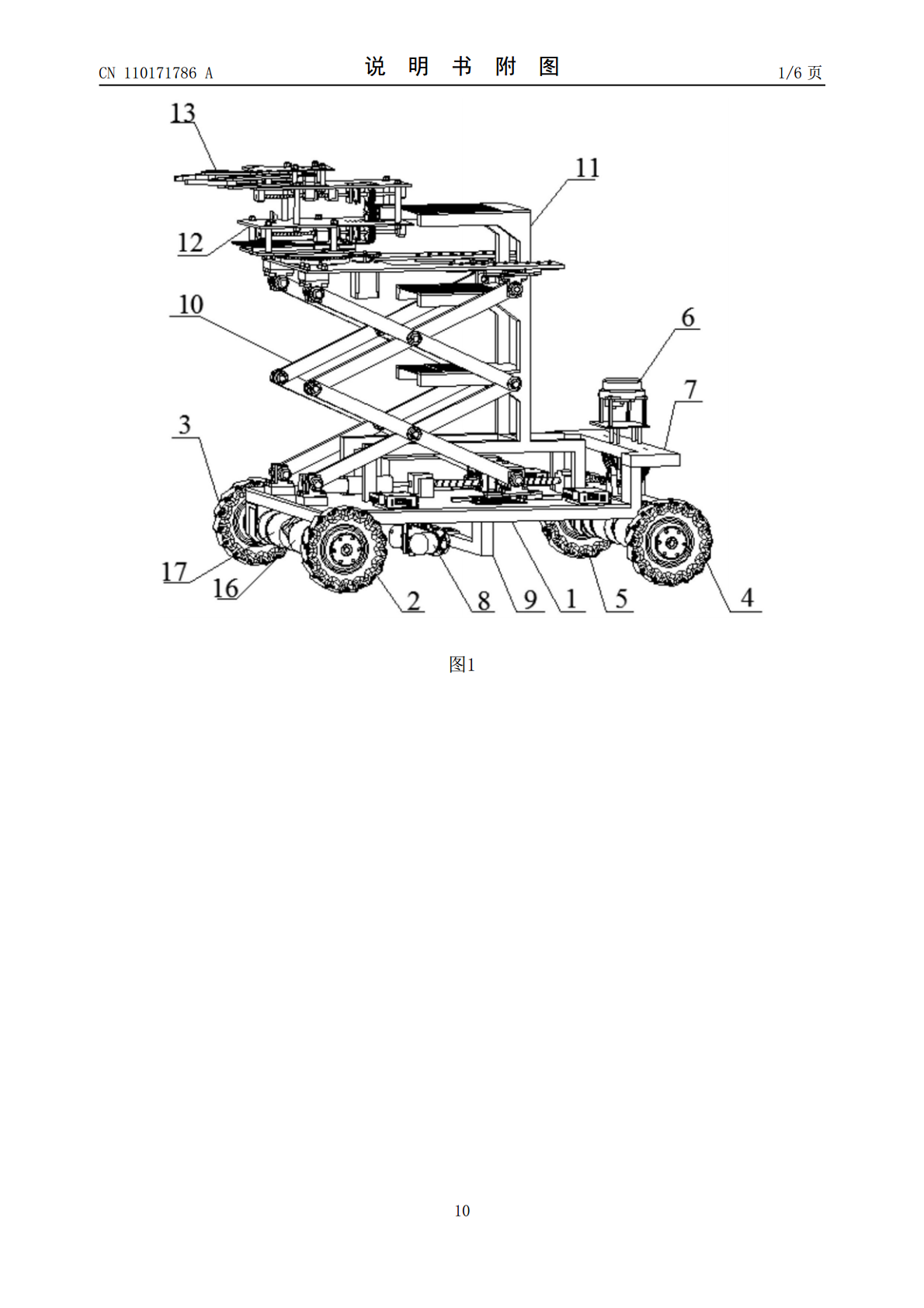
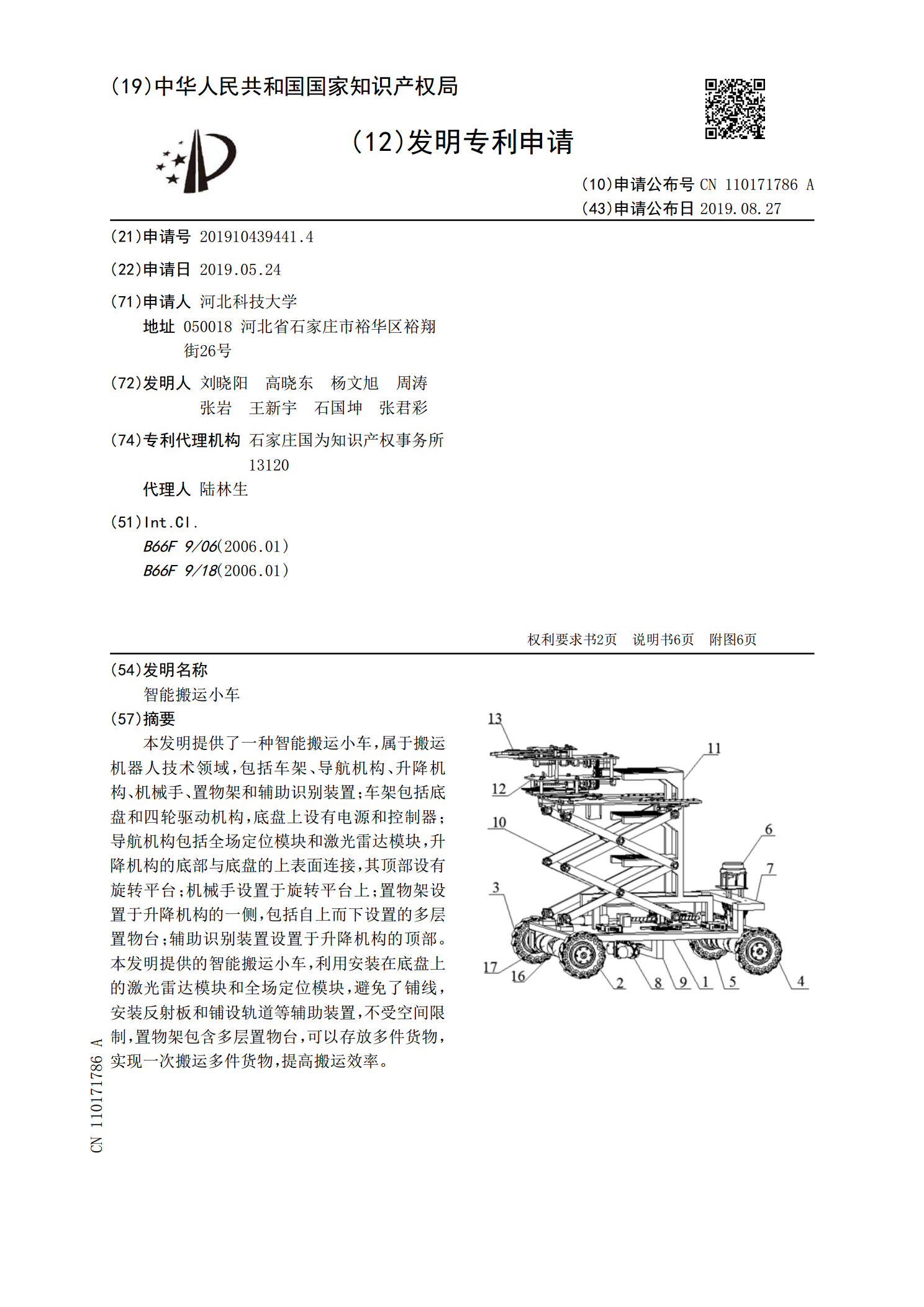
本发明提供了一种智能搬运小车,属于搬运机器人技术领域,包括车架、导航机构、升降机构、机械手、置物架和辅助识别装置;车架包括底盘和四轮驱动机构,底盘上设有电源和控制器;导航机构包括全场定位模块和激光雷达模块,升降机构的底部与底盘的上表面连接,其顶部设有旋转平台;机械手设置于旋转平台上;置物架设置于升降机构的一侧,包括自上而下设置的多层置物台;辅助识别装置设置于升降机构的顶部。本发明提供的智能搬运小车,利用安装在底盘上的激光雷达模块和全场定位模块,避免了铺线,安装反射板和铺设轨道等辅助装置,不受空间限制,置物

智能搬运-小车汇总.doc
智能搬运小车摘要:关键词:单片机,PWM,光电传感器,运货小车1.引言1.1智能搬运小车研究的背景和目的:运货是各个行业不可或缺的过程,人工运货随着经济的快速发展,不能完全满足市场的需求。世界上许多国家都在积极进行智能车辆的研究和开发设计。移动机器人是机器人学中的一个重要分支,出现于20世纪60年代。当时斯坦福研究院的NilsNilssen和charlesRosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规
智能升降搬运小车.pdf
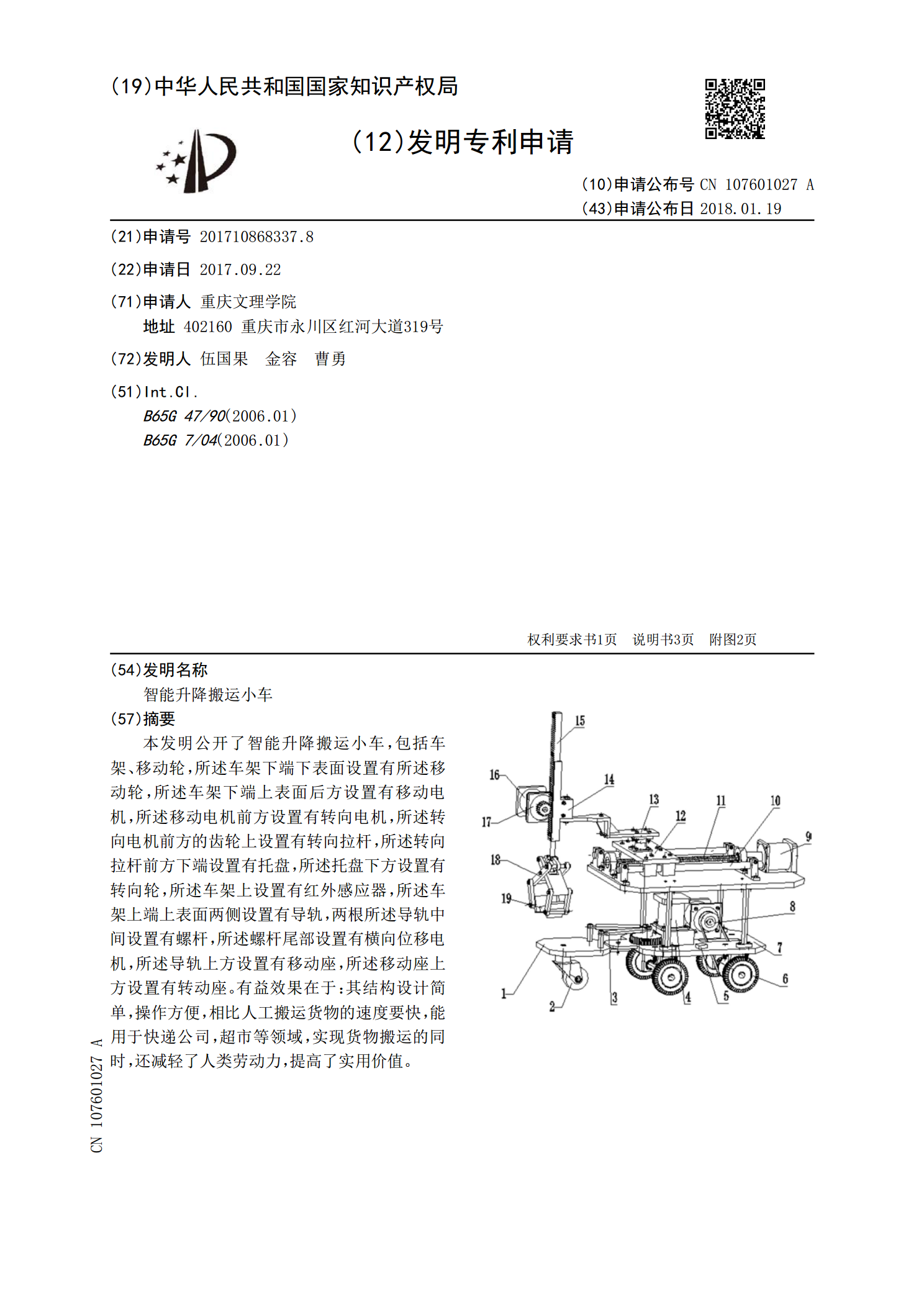
本发明公开了智能升降搬运小车,包括车架、移动轮,所述车架下端下表面设置有所述移动轮,所述车架下端上表面后方设置有移动电机,所述移动电机前方设置有转向电机,所述转向电机前方的齿轮上设置有转向拉杆,所述转向拉杆前方下端设置有托盘,所述托盘下方设置有转向轮,所述车架上设置有红外感应器,所述车架上端上表面两侧设置有导轨,两根所述导轨中间设置有螺杆,所述螺杆尾部设置有横向位移电机,所述导轨上方设置有移动座,所述移动座上方设置有转动座。有益效果在于:其结构设计简单,操作方便,相比人工搬运货物的速度要快,能用于快递公司

基于UWB的智能搬运小车.pptx
基于UWB的智能搬运小车目录添加目录项标题UWB技术简介UWB技术原理UWB技术的应用领域UWB技术的优势智能搬运小车的功能与特点智能搬运小车的功能智能搬运小车的结构特点智能搬运小车的优势基于UWB技术的智能搬运小车实现方案UWB定位技术实现原理智能搬运小车的硬件组成智能搬运小车的软件设计智能搬运小车的测试与验证测试环境与设备测试方法与步骤测试结果与分析智能搬运小车的市场前景与展望智能搬运小车的应用场景智能搬运小车的发展趋势智能搬运小车的市场潜力感谢观看