
移动装置平衡摇臂机构.pdf

一吃****天材


1/9

2/9
3/9
4/9

5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
移动装置平衡摇臂机构.pdf
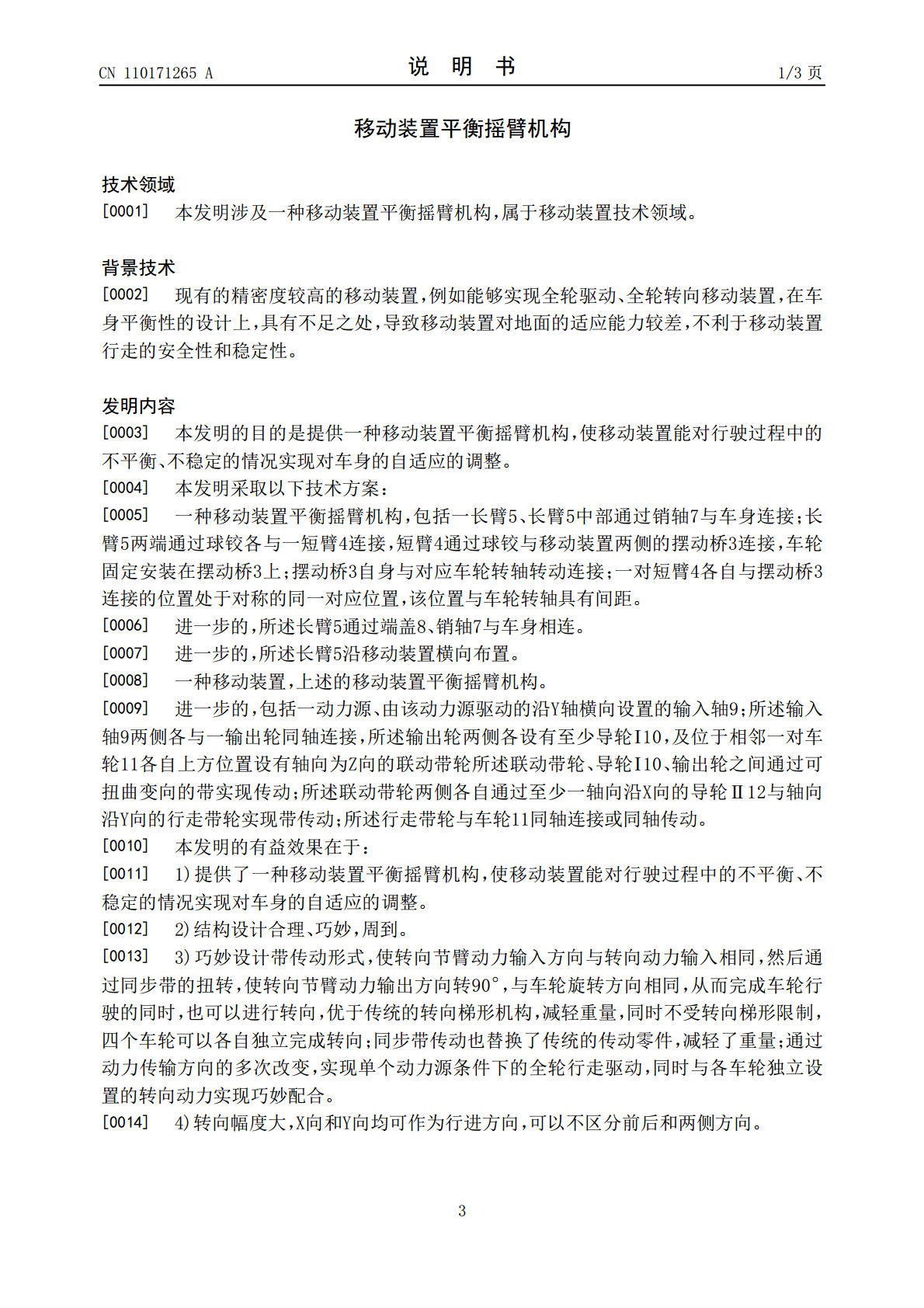
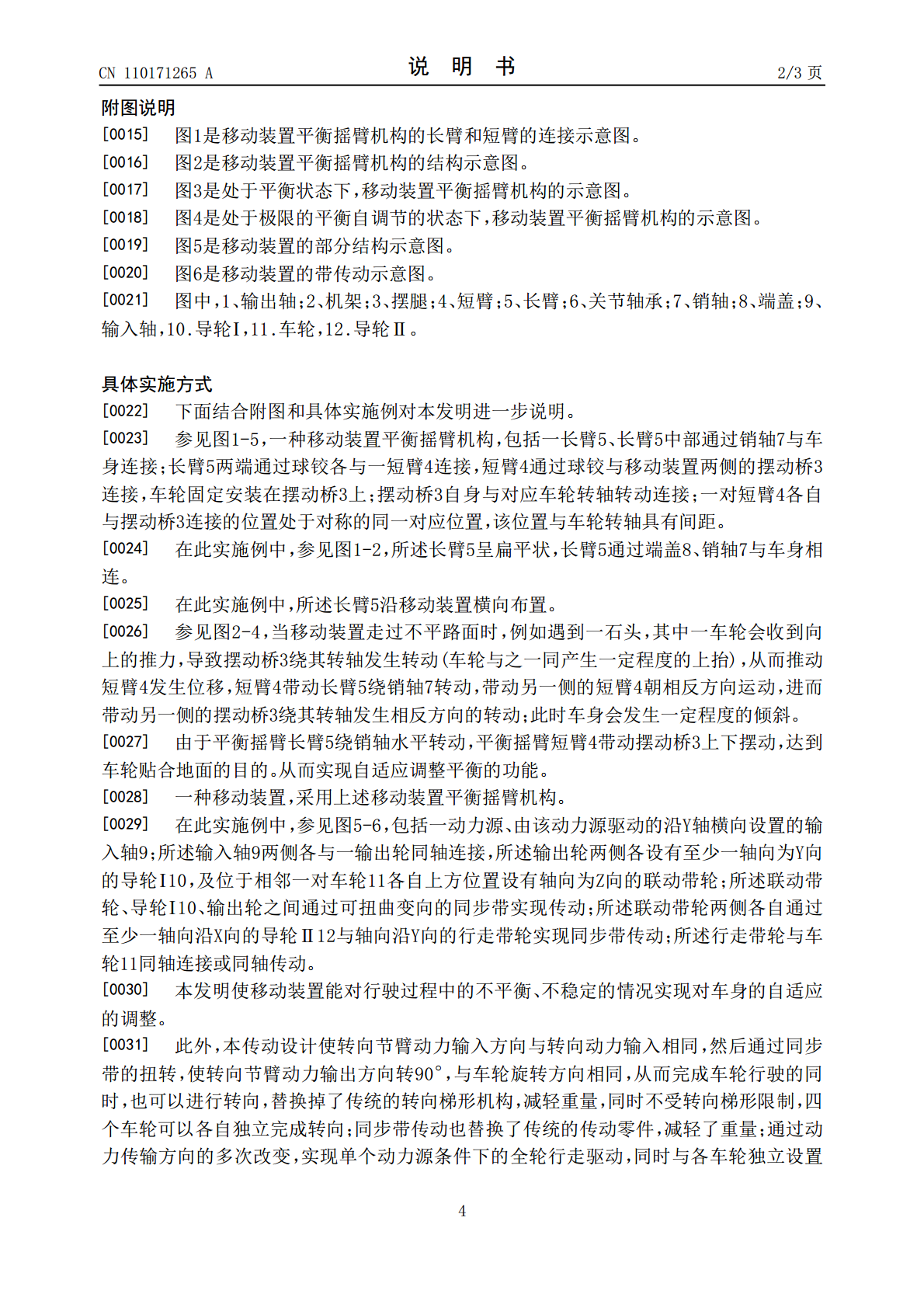
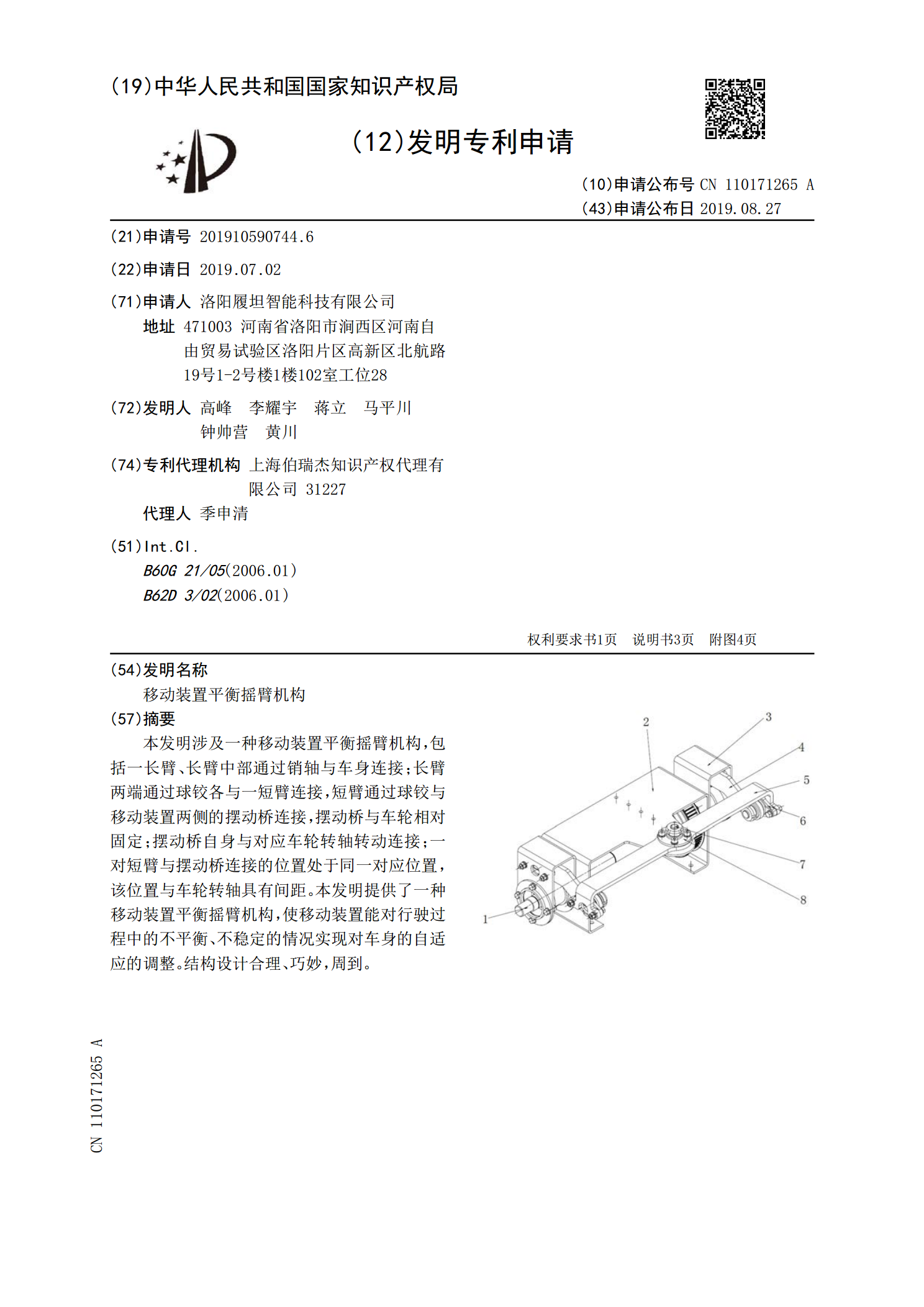
本发明涉及一种移动装置平衡摇臂机构,包括一长臂、长臂中部通过销轴与车身连接;长臂两端通过球铰各与一短臂连接,短臂通过球铰与移动装置两侧的摆动桥连接,摆动桥与车轮相对固定;摆动桥自身与对应车轮转轴转动连接;一对短臂与摆动桥连接的位置处于同一对应位置,该位置与车轮转轴具有间距。本发明提供了一种移动装置平衡摇臂机构,使移动装置能对行驶过程中的不平衡、不稳定的情况实现对车身的自适应的调整。结构设计合理、巧妙,周到。
一种随遇平衡的绳驱动伸缩摇臂机构.pdf
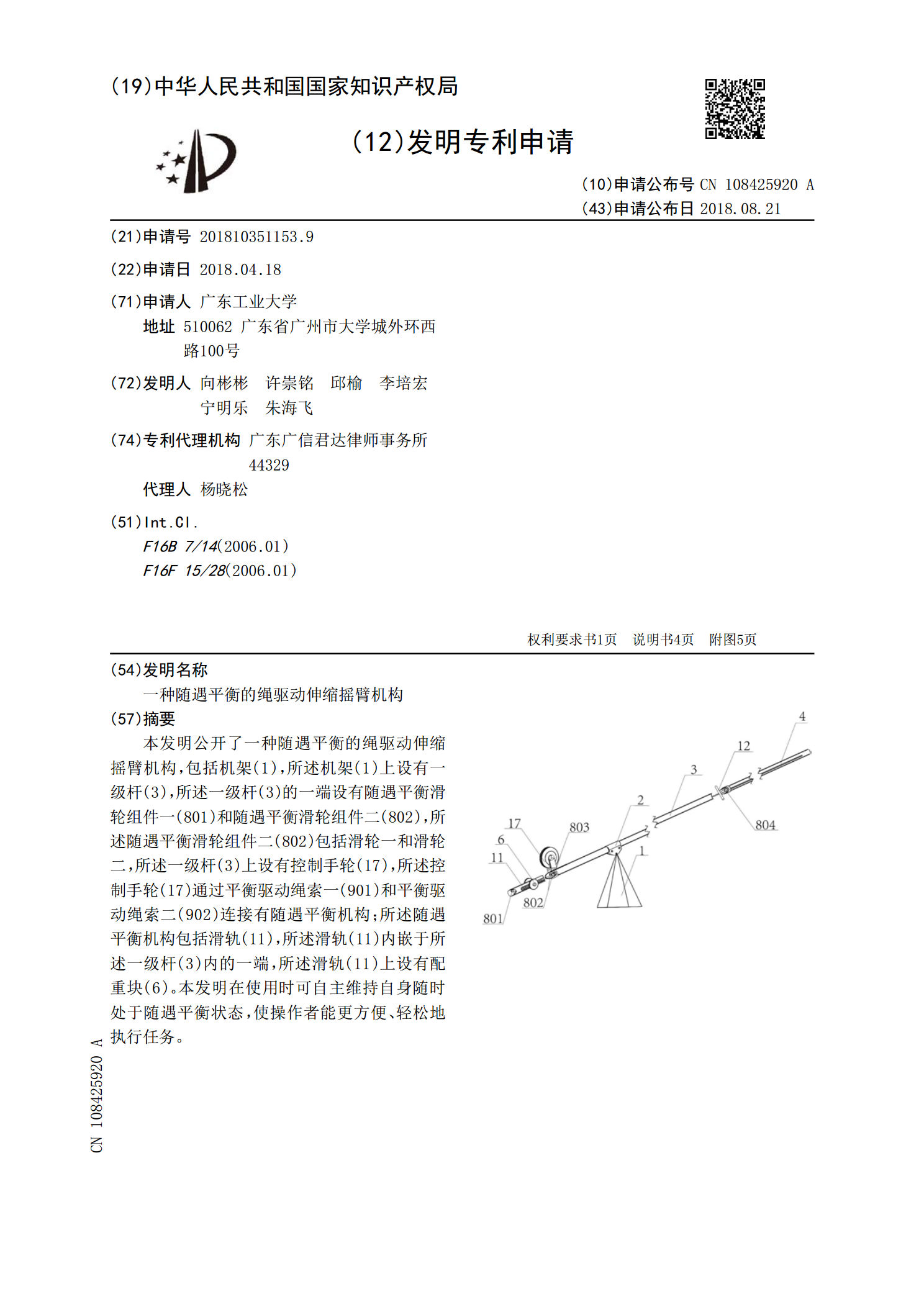
本发明公开了一种随遇平衡的绳驱动伸缩摇臂机构,包括机架(1),所述机架(1)上设有一级杆(3),所述一级杆(3)的一端设有随遇平衡滑轮组件一(801)和随遇平衡滑轮组件二(802),所述随遇平衡滑轮组件二(802)包括滑轮一和滑轮二,所述一级杆(3)上设有控制手轮(17),所述控制手轮(17)通过平衡驱动绳索一(901)和平衡驱动绳索二(902)连接有随遇平衡机构;所述随遇平衡机构包括滑轨(11),所述滑轨(11)内嵌于所述一级杆(3)内的一端,所述滑轨(11)上设有配重块(6)。本发明在使用时可自主维持
一种液压摇臂裁断机摆臂的平衡机构.pdf
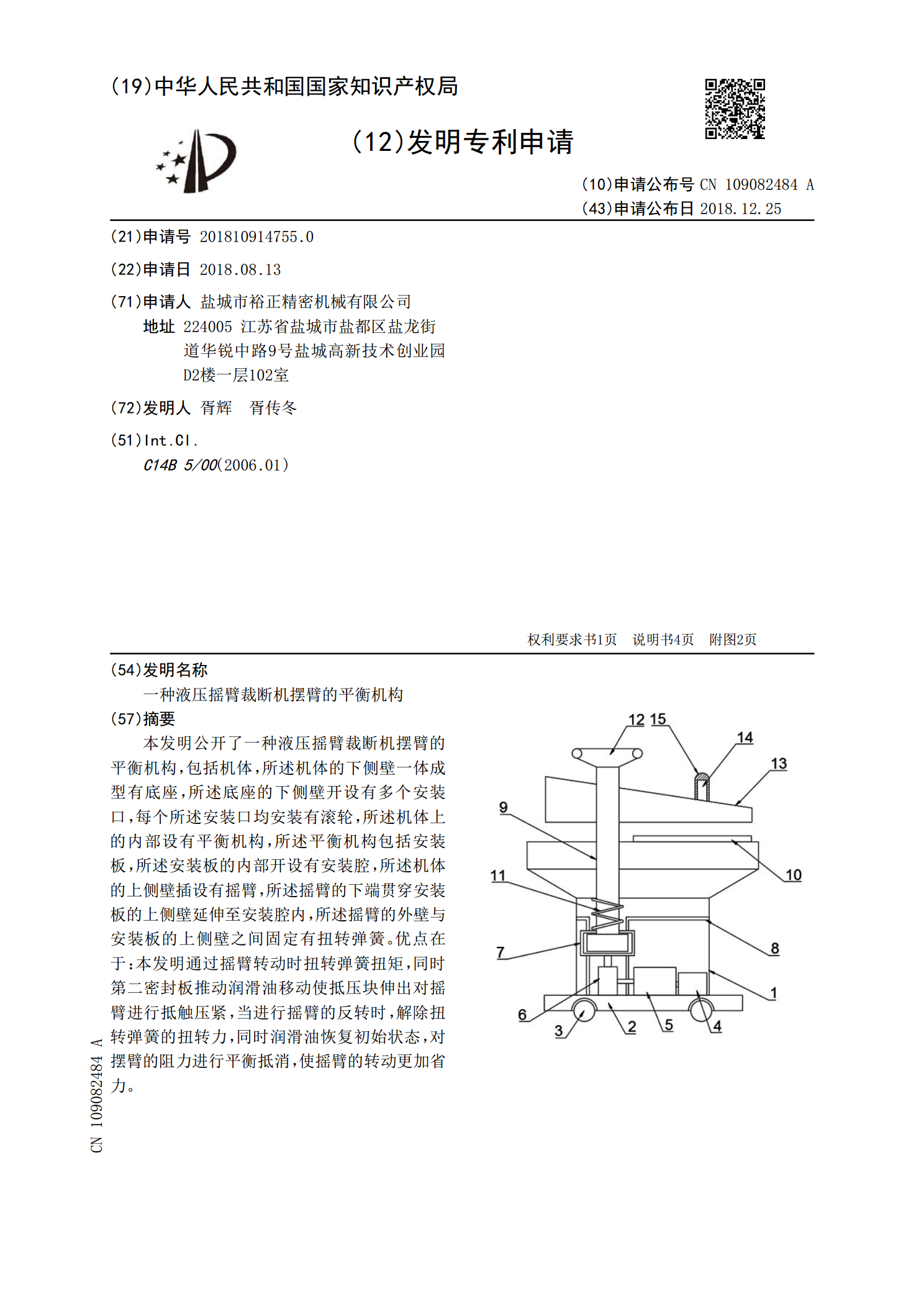
本发明公开了一种液压摇臂裁断机摆臂的平衡机构,包括机体,所述机体的下侧壁一体成型有底座,所述底座的下侧壁开设有多个安装口,每个所述安装口均安装有滚轮,所述机体上的内部设有平衡机构,所述平衡机构包括安装板,所述安装板的内部开设有安装腔,所述机体的上侧壁插设有摇臂,所述摇臂的下端贯穿安装板的上侧壁延伸至安装腔内,所述摇臂的外壁与安装板的上侧壁之间固定有扭转弹簧。优点在于:本发明通过摇臂转动时扭转弹簧扭矩,同时第二密封板推动润滑油移动使抵压块伸出对摇臂进行抵触压紧,当进行摇臂的反转时,解除扭转弹簧的扭转力,同时
一种解决平衡摇臂式底盘车辆转向问题的转向机构.pdf
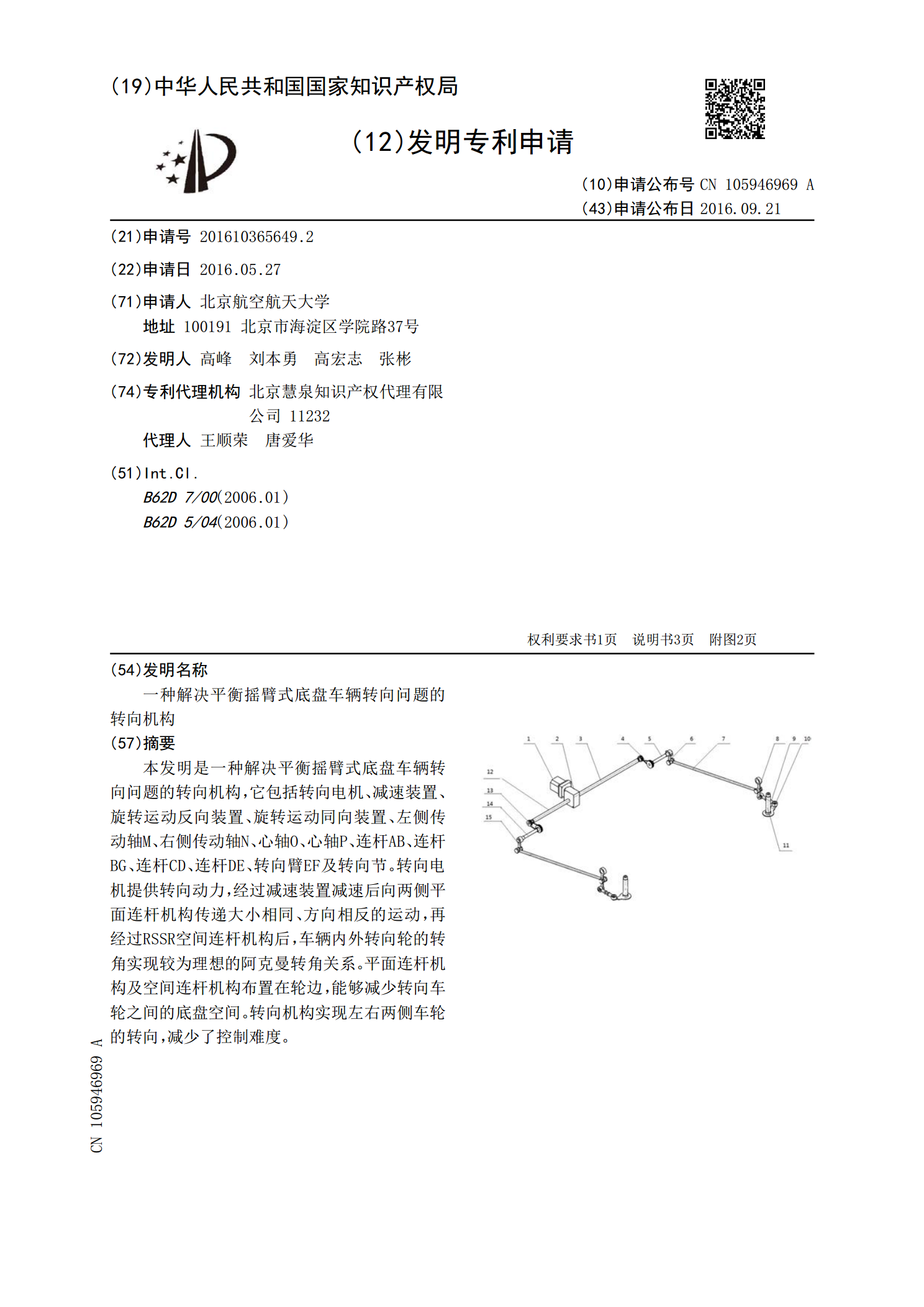
本发明是一种解决平衡摇臂式底盘车辆转向问题的转向机构,它包括转向电机、减速装置、旋转运动反向装置、旋转运动同向装置、左侧传动轴M、右侧传动轴N、心轴O、心轴P、连杆AB、连杆BG、连杆CD、连杆DE、转向臂EF及转向节。转向电机提供转向动力,经过减速装置减速后向两侧平面连杆机构传递大小相同、方向相反的运动,再经过RSSR空间连杆机构后,车辆内外转向轮的转角实现较为理想的阿克曼转角关系。平面连杆机构及空间连杆机构布置在轮边,能够减少转向车轮之间的底盘空间。转向机构实现左右两侧车轮的转向,减少了控制难度。

一种液压摇臂裁断机摆臂的平衡机构.pdf
本发明公开了一种液压摇臂裁断机摆臂的平衡机构,包括摇臂机箱、平衡驱动机构、平衡导向机构和摇臂,摇臂机箱内部的底部安装有平衡驱动机构,摇臂机箱的底部固定连接有底座,底座的底部固定连接有若干移动轮,平衡驱动机构的顶部安装有液压缸,液压缸远离平衡驱动机构的一端穿过摇臂机箱的顶壁,液压缸的输出端固定连接有液压杆,且液压杆的顶部固定连接有摇臂,本发明结构简单,平衡驱动机构上的蜗轮、蜗杆啮合具有良好的自锁功能,避免摇臂摆动后的回转波动,使得驱动摇臂摆动的驱动机构具有稳定的控制摇臂平衡的性能,平衡导向机构防止摇臂摆动偏