
一种可重复使用空间碎片柔性抓捕布兜装置及抓捕方法.pdf

小凌****甜蜜

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可重复使用空间碎片柔性抓捕布兜装置及抓捕方法.pdf
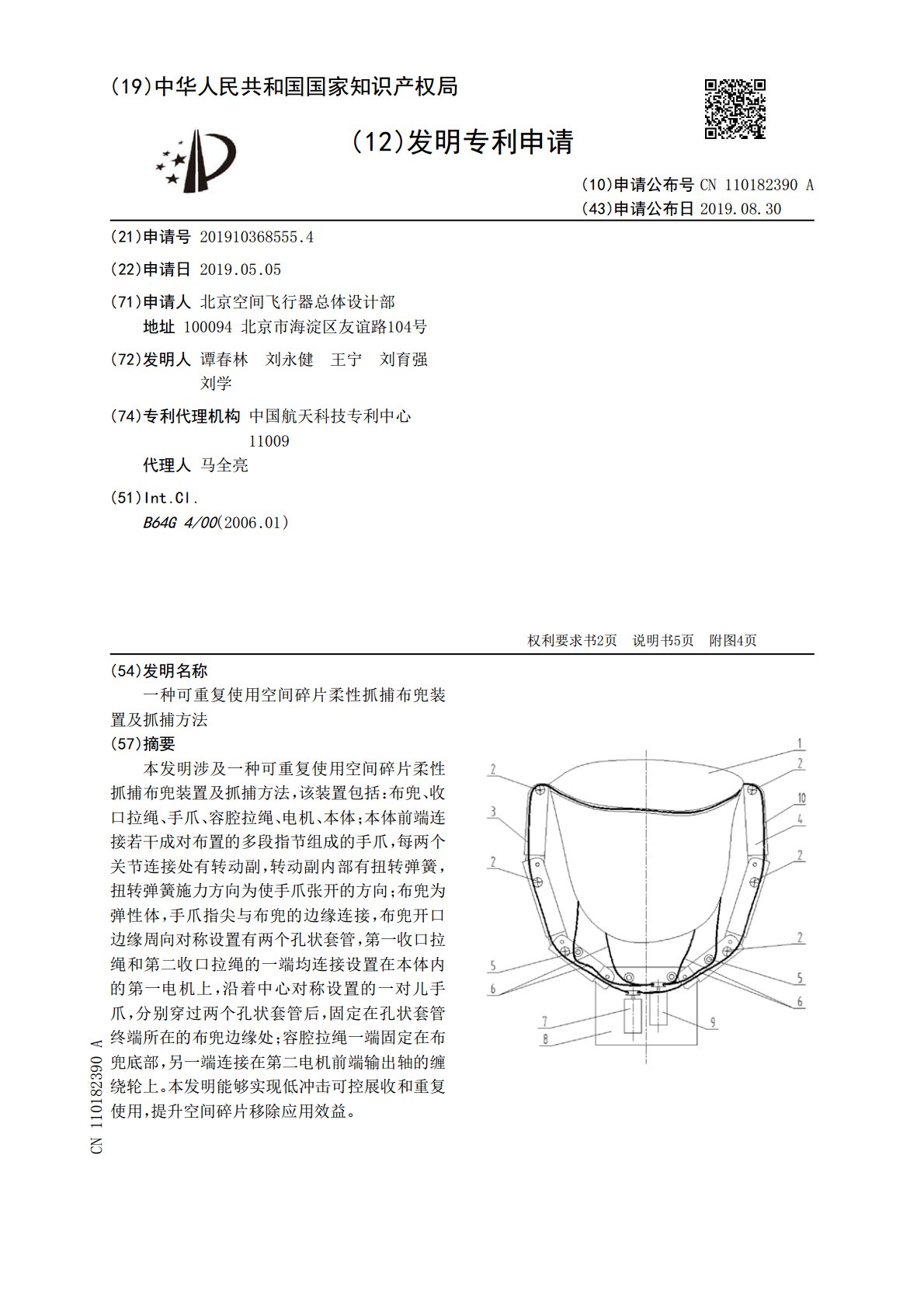
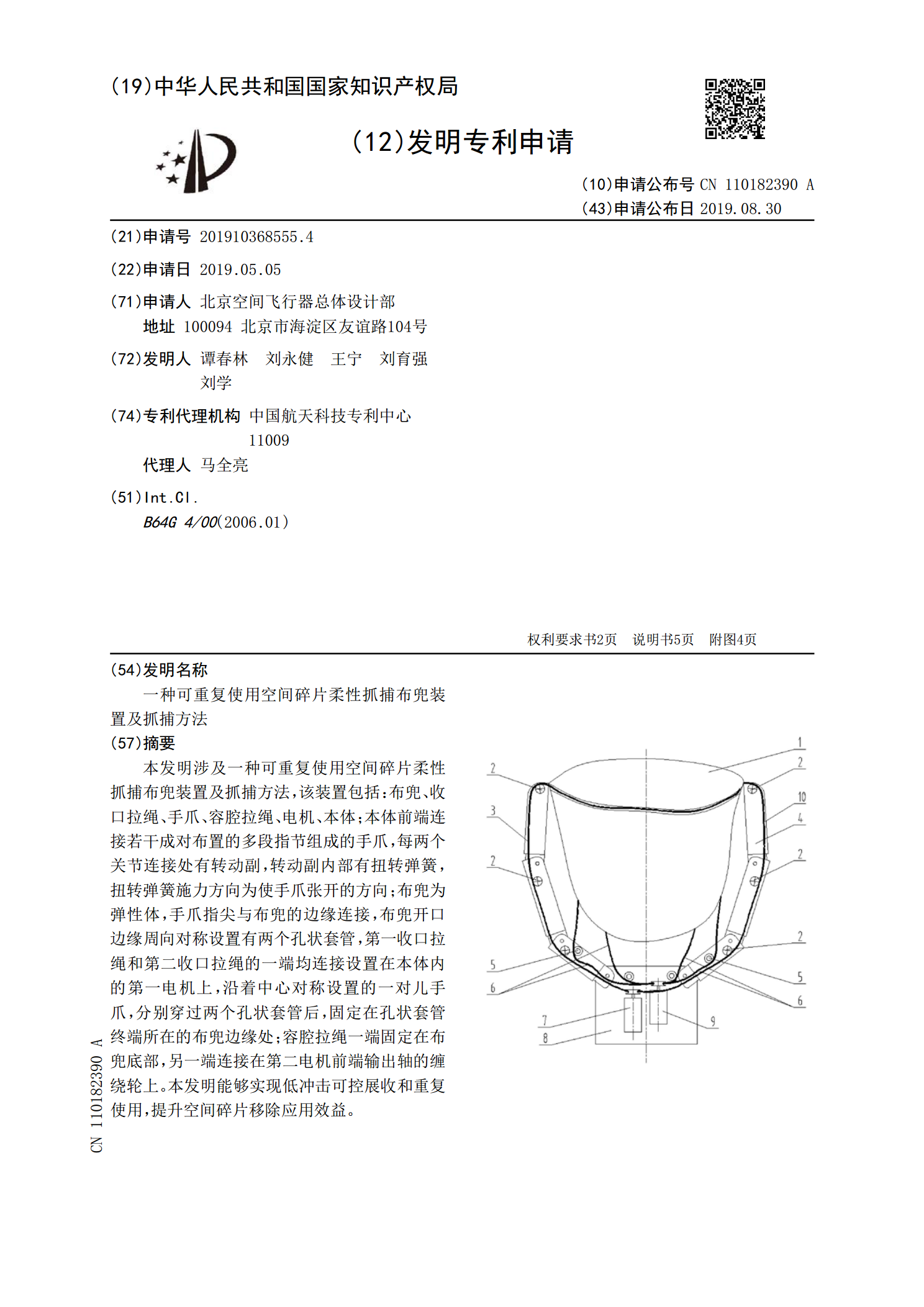
本发明涉及一种可重复使用空间碎片柔性抓捕布兜装置及抓捕方法,该装置包括:布兜、收口拉绳、手爪、容腔拉绳、电机、本体;本体前端连接若干成对布置的多段指节组成的手爪,每两个关节连接处有转动副,转动副内部有扭转弹簧,扭转弹簧施力方向为使手爪张开的方向;布兜为弹性体,手爪指尖与布兜的边缘连接,布兜开口边缘周向对称设置有两个孔状套管,第一收口拉绳和第二收口拉绳的一端均连接设置在本体内的第一电机上,沿着中心对称设置的一对儿手爪,分别穿过两个孔状套管后,固定在孔状套管终端所在的布兜边缘处;容腔拉绳一端固定在布兜底部,另

一种空间柔性抓捕系统地面物理验证装置及方法.pdf
本申请公开了一种空间柔性抓捕系统地面物理验证装置及方法,涉及空间机器人地面试验验证领域,包括外框架;目标驱动机构,包括驱动目标以垂直于地面方向为轴线进行转动的旋转驱动装置、驱动目标和旋转驱动装置一同沿着垂直于地面方向移动的竖直驱动装置,目标通过第一拉线连接于旋转驱动装置;柔性抓捕系统,包括软体臂、安装板、软体臂驱动机构,安装板连接于外框架,软体臂一端固定连接于安装板上,软体臂另一端通过第二拉线与柔性臂驱动系统连接;软体臂驱动机构用于控制第二拉线拉动软体臂的位置和角度、以使软体臂捕获目标。能够在地面环境中实
一种空间绳系抓捕锁紧装置.pdf
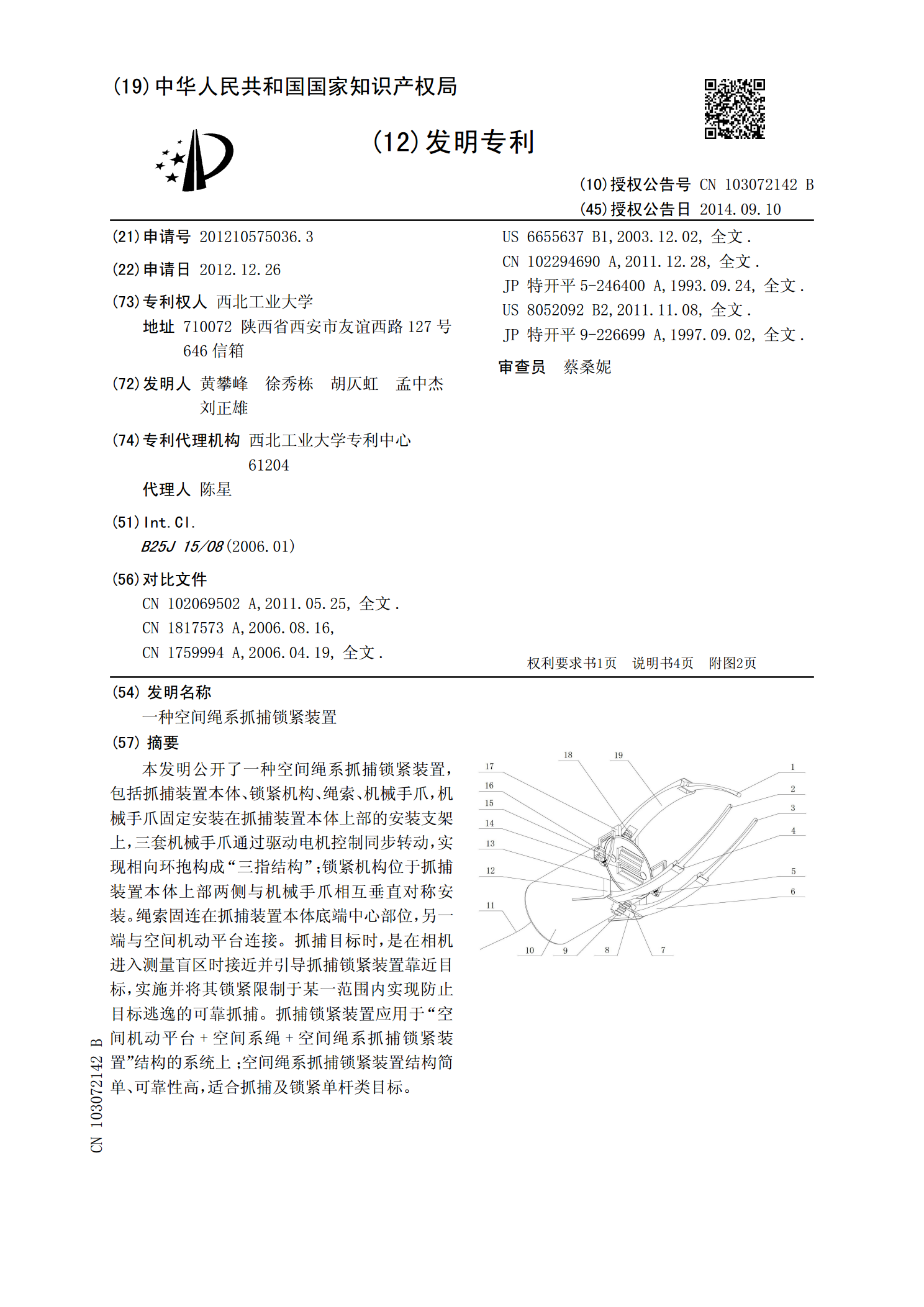
本发明公开了一种空间绳系抓捕锁紧装置,包括抓捕装置本体、锁紧机构、绳索、机械手爪,机械手爪固定安装在抓捕装置本体上部的安装支架上,三套机械手爪通过驱动电机控制同步转动,实现相向环抱构成“三指结构”;锁紧机构位于抓捕装置本体上部两侧与机械手爪相互垂直对称安装。绳索固连在抓捕装置本体底端中心部位,另一端与空间机动平台连接。抓捕目标时,是在相机进入测量盲区时接近并引导抓捕锁紧装置靠近目标,实施并将其锁紧限制于某一范围内实现防止目标逃逸的可靠抓捕。抓捕锁紧装置应用于“空间机动平台+空间系绳+空间绳系抓捕锁紧装置”
一种双向全断带抓捕装置、M型抓捕装置及使用方法.pdf
本发明公开了一种双向全断带抓捕装置、M型抓捕装置及其使用方法,包括支撑架和输送带,所述双向全断带抓捕装置还包括抓捕横梁和抓捕总成;抓捕横梁和抓捕总成分别设置于所述支撑架上,所述输送带设置于所述抓捕横梁和抓捕总成之间,所述抓捕总成相对于所述支撑架摆动并卡紧所述输送带。本装置在安装时不需要考虑方向性,双向可以使用,同时其整体结构简单坚固、免于日常维护,适用于各种复杂工况的带式输送机,在断带现象发生时,一对对称布置的抓捕架总成通过连杆结构同步对上、下输送带同时实施抓捕且抓捕结合点面为多点面接触。
一种矿车抓捕装置.pdf
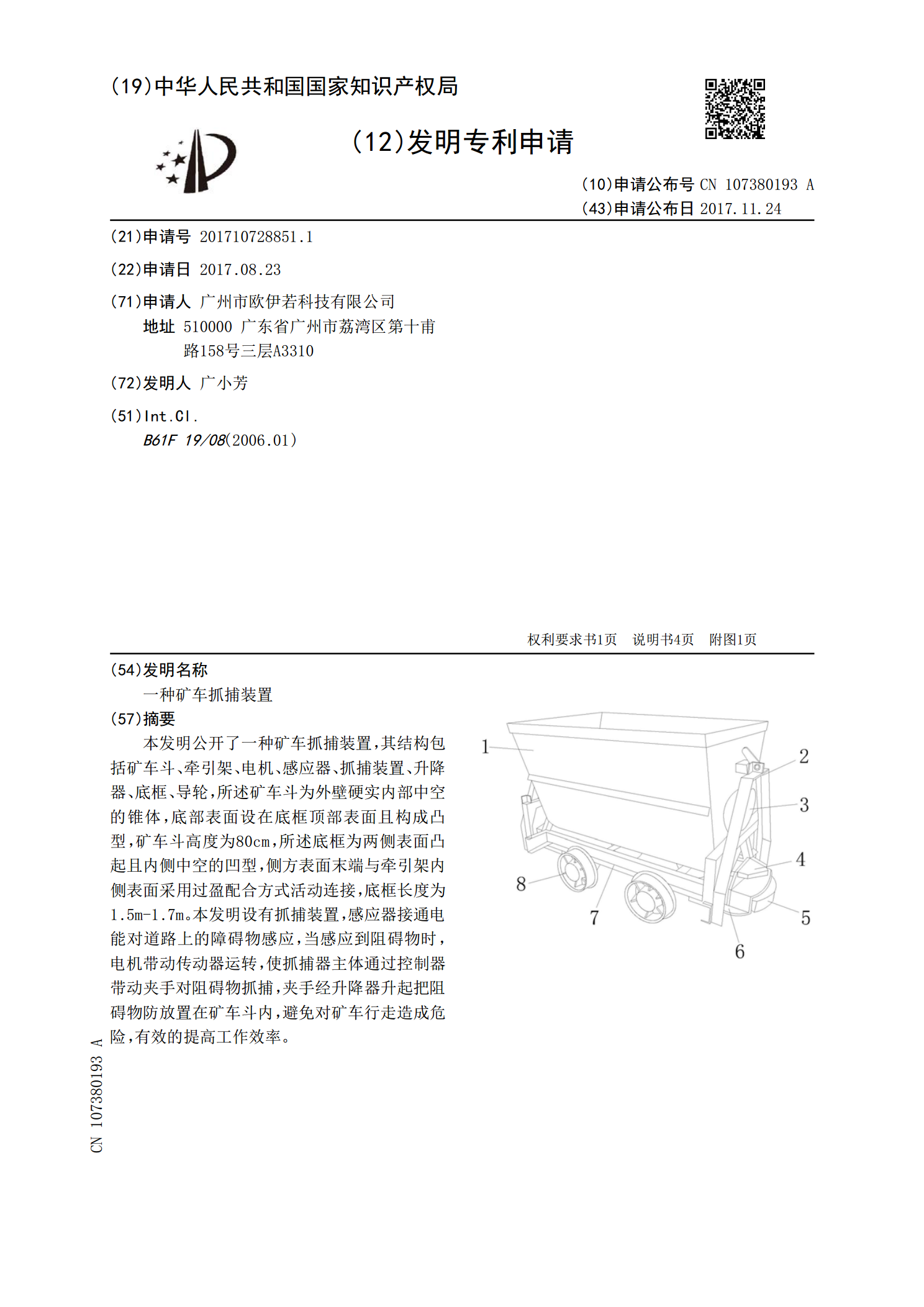
本发明公开了一种矿车抓捕装置,其结构包括矿车斗、牵引架、电机、感应器、抓捕装置、升降器、底框、导轮,所述矿车斗为外壁硬实内部中空的锥体,底部表面设在底框顶部表面且构成凸型,矿车斗高度为80cm,所述底框为两侧表面凸起且内侧中空的凹型,侧方表面末端与牵引架内侧表面采用过盈配合方式活动连接,底框长度为1.5m‑1.7m。本发明设有抓捕装置,感应器接通电能对道路上的障碍物感应,当感应到阻碍物时,电机带动传动器运转,使抓捕器主体通过控制器带动夹手对阻碍物抓捕,夹手经升降器升起把阻碍物防放置在矿车斗内,避免对矿车行