
一种空间绳系抓捕锁紧装置.pdf

一吃****春艳

1/8
2/8
3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空间绳系抓捕锁紧装置.pdf
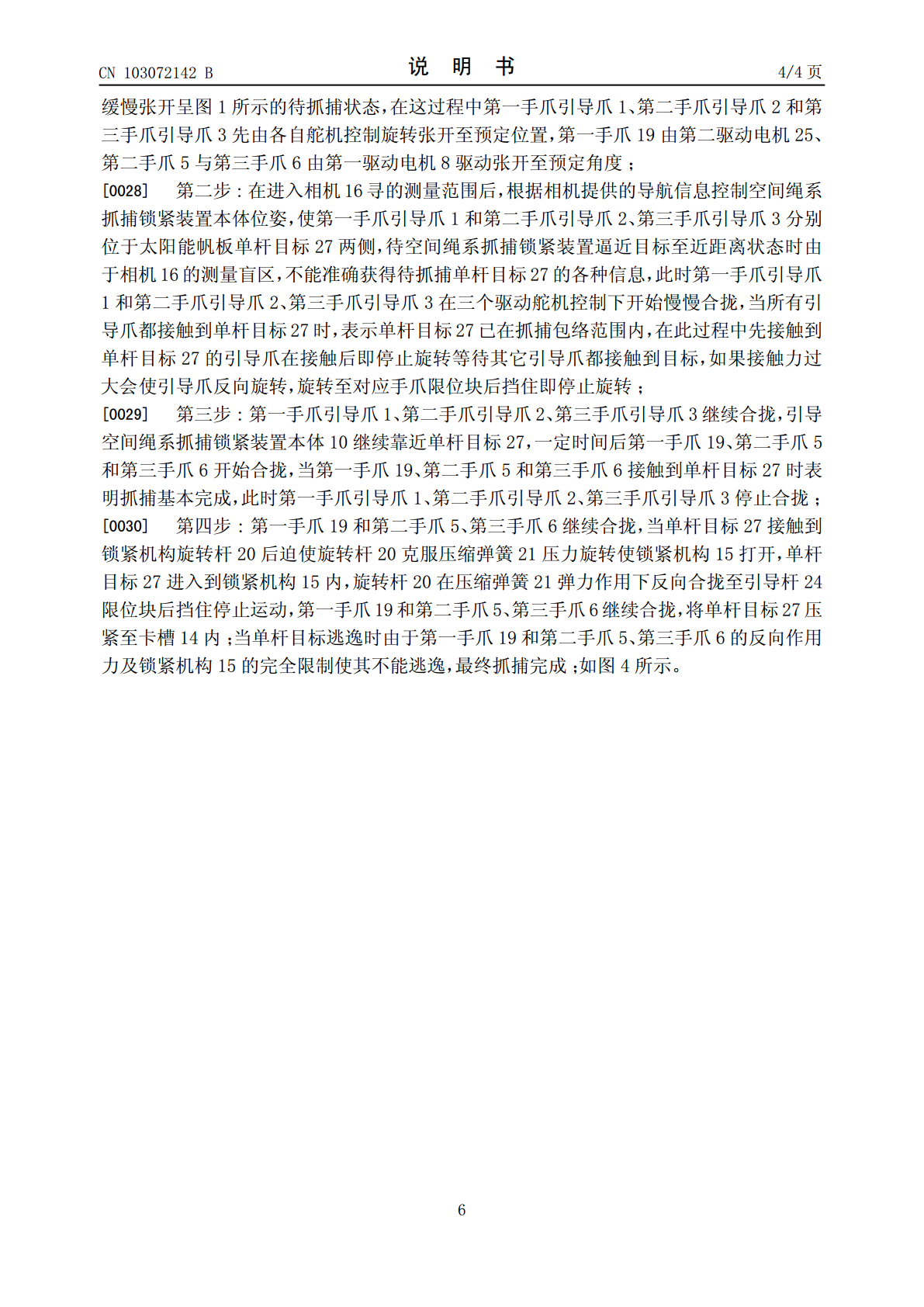
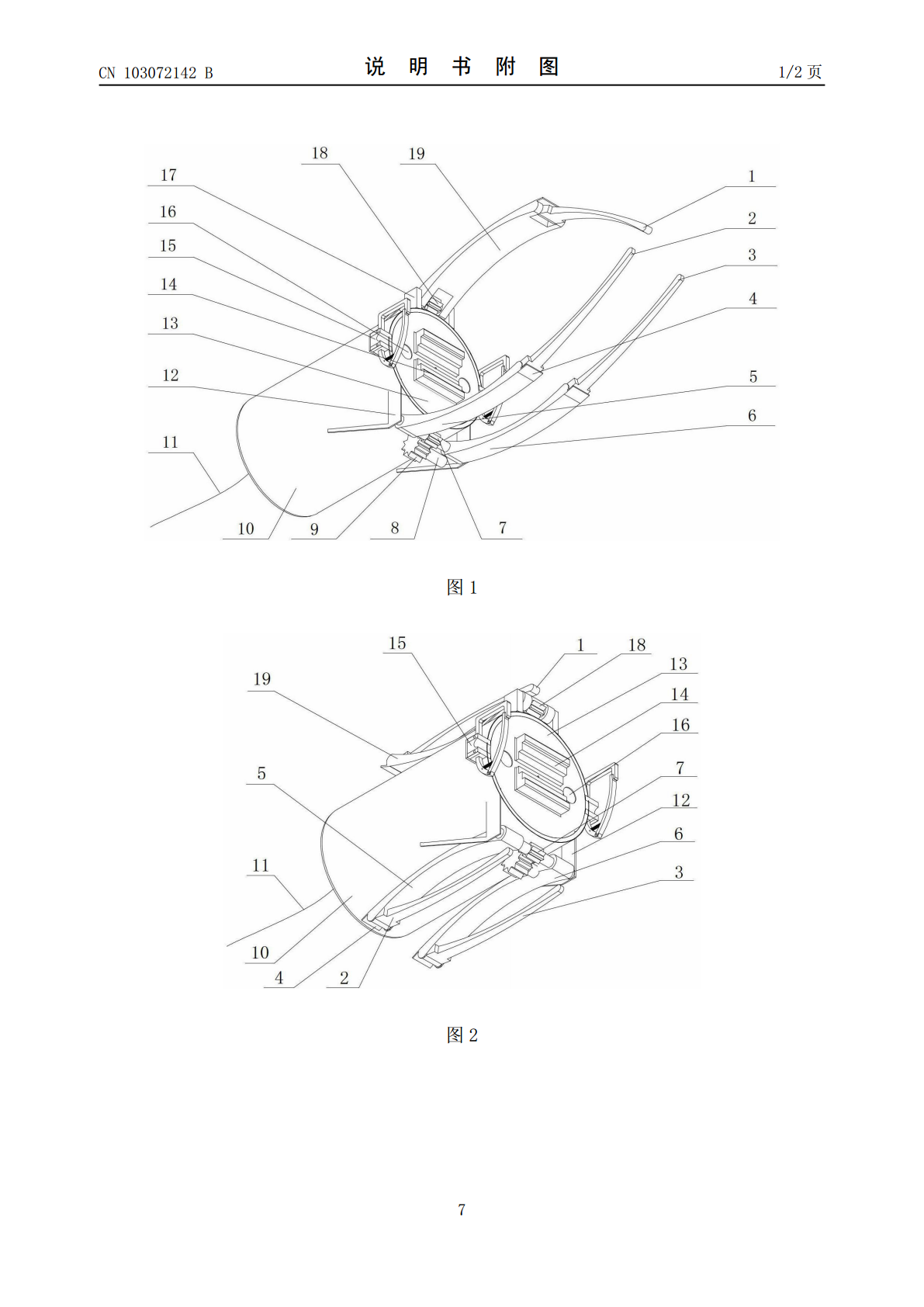
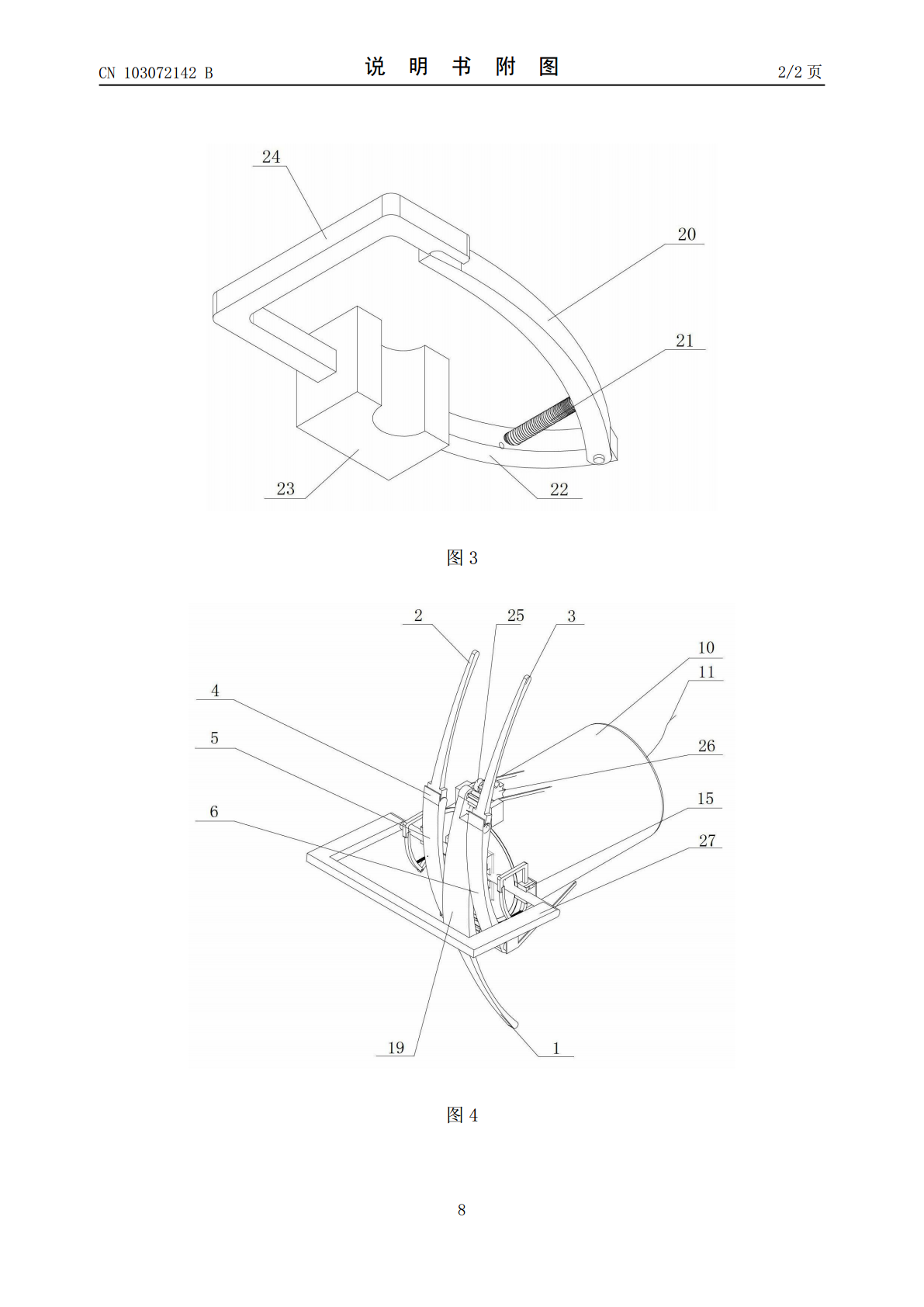
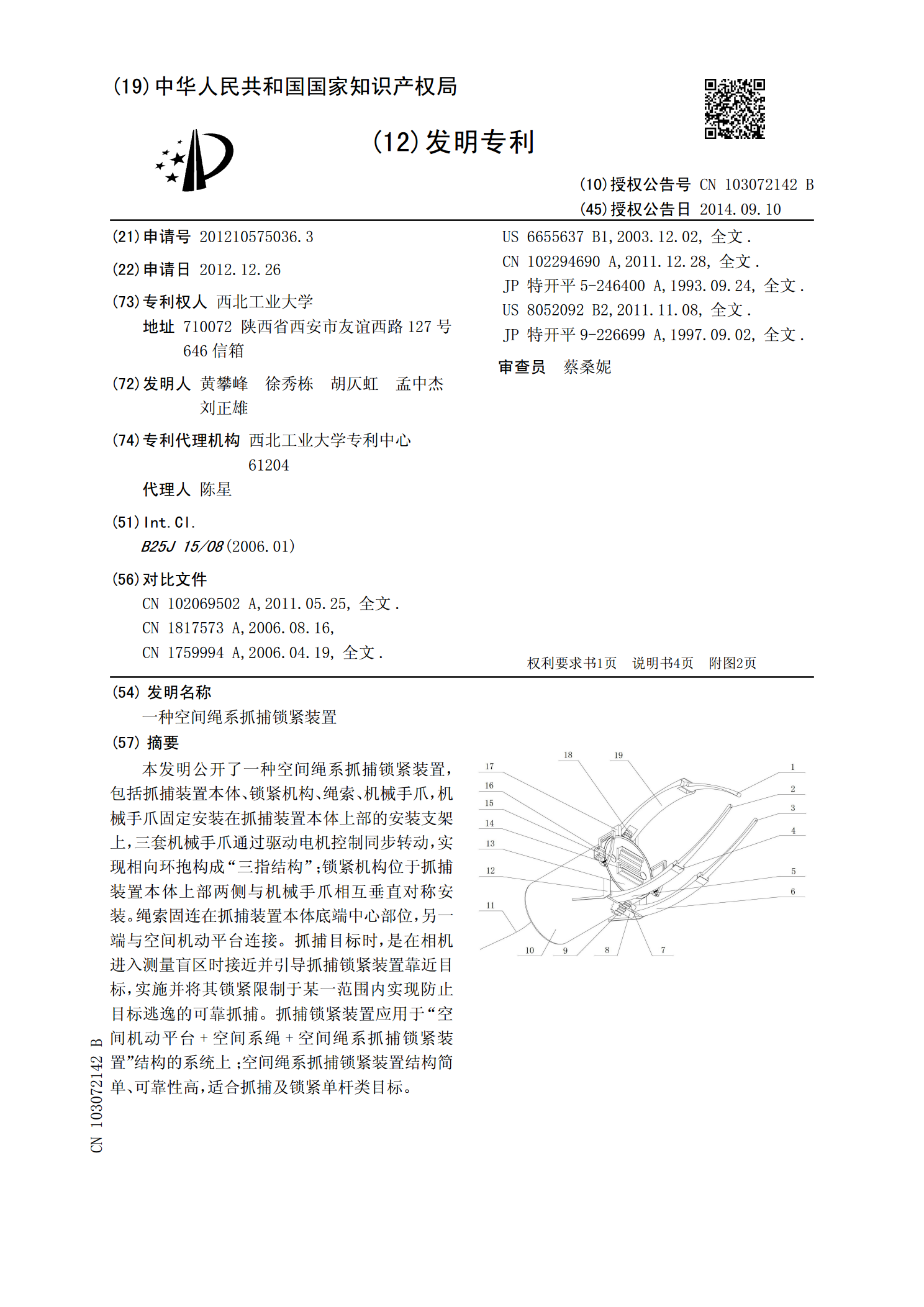
本发明公开了一种空间绳系抓捕锁紧装置,包括抓捕装置本体、锁紧机构、绳索、机械手爪,机械手爪固定安装在抓捕装置本体上部的安装支架上,三套机械手爪通过驱动电机控制同步转动,实现相向环抱构成“三指结构”;锁紧机构位于抓捕装置本体上部两侧与机械手爪相互垂直对称安装。绳索固连在抓捕装置本体底端中心部位,另一端与空间机动平台连接。抓捕目标时,是在相机进入测量盲区时接近并引导抓捕锁紧装置靠近目标,实施并将其锁紧限制于某一范围内实现防止目标逃逸的可靠抓捕。抓捕锁紧装置应用于“空间机动平台+空间系绳+空间绳系抓捕锁紧装置”

断绳抓捕装置.pdf
本发明公开了一种断绳抓捕装置,包括机架、连杆机构、缓冲弹簧、电动推杆、抓捕楔块、底座和托绳轮。抓捕楔块包括上楔块、导向带、行程销、下楔块和闸瓦,上楔块与导向带通过开槽沉头螺钉连接,导向带与下楔块通过开槽沉头螺钉连接,上楔块与下楔块通过行程销连接,下楔块与闸瓦通过内六角螺钉连接,机架与连杆机构通过销轴连接,连杆机构与缓冲弹簧通过销轴连接,缓冲弹簧与电动推杆通过螺纹连接,抓捕楔块与连杆机构铰接,底座与机架焊接,托绳轮与机架通过螺栓连接。断绳抓捕装置结构简单合理,安全可靠,能够及时有效的在设备运行断绳后抓捕绳索
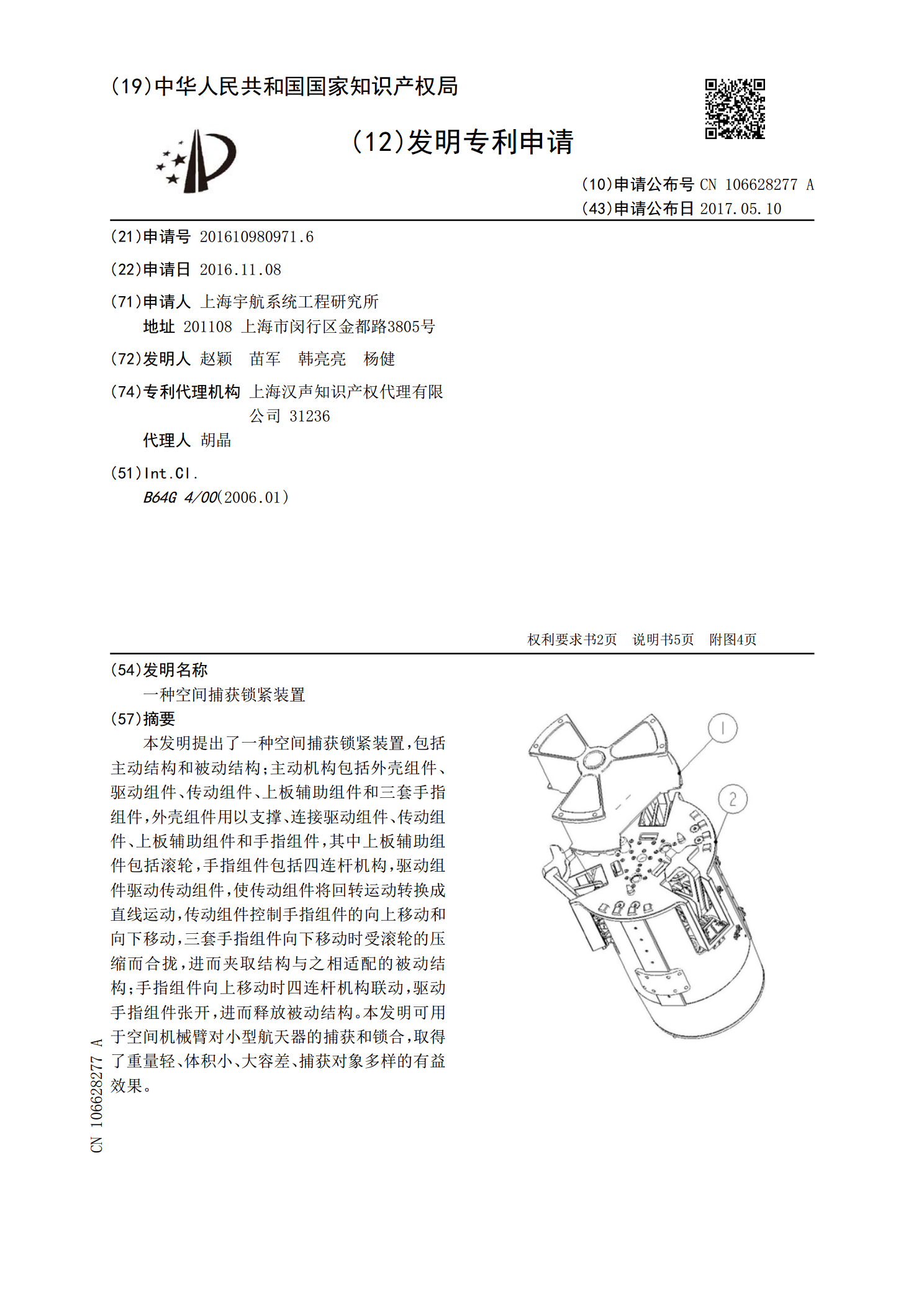
一种空间捕获锁紧装置.pdf
本发明提出了一种空间捕获锁紧装置,包括主动结构和被动结构;主动机构包括外壳组件、驱动组件、传动组件、上板辅助组件和三套手指组件,外壳组件用以支撑、连接驱动组件、传动组件、上板辅助组件和手指组件,其中上板辅助组件包括滚轮,手指组件包括四连杆机构,驱动组件驱动传动组件,使传动组件将回转运动转换成直线运动,传动组件控制手指组件的向上移动和向下移动,三套手指组件向下移动时受滚轮的压缩而合拢,进而夹取结构与之相适配的被动结构;手指组件向上移动时四连杆机构联动,驱动手指组件张开,进而释放被动结构。本发明可用于空间机械
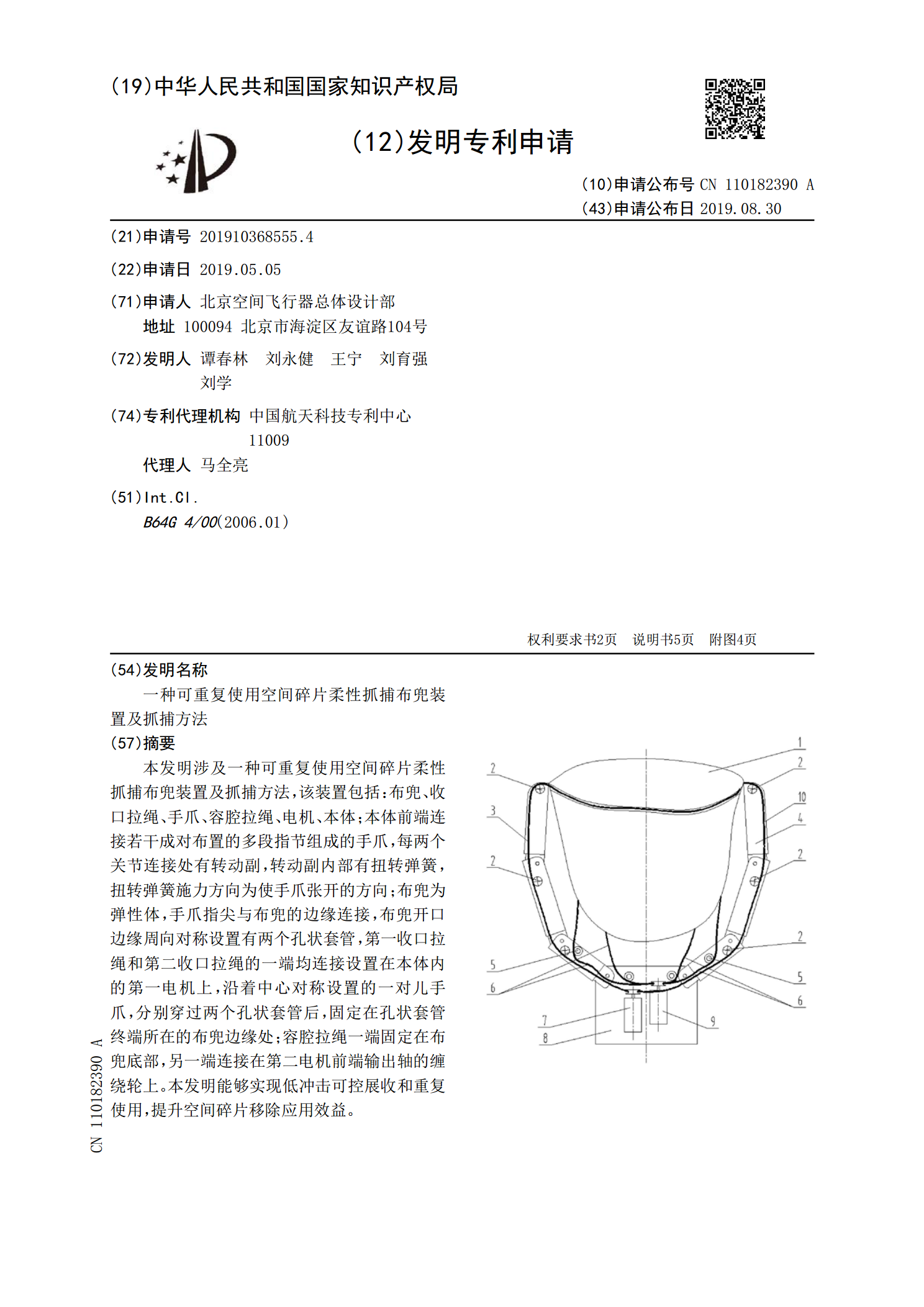
一种可重复使用空间碎片柔性抓捕布兜装置及抓捕方法.pdf
本发明涉及一种可重复使用空间碎片柔性抓捕布兜装置及抓捕方法,该装置包括:布兜、收口拉绳、手爪、容腔拉绳、电机、本体;本体前端连接若干成对布置的多段指节组成的手爪,每两个关节连接处有转动副,转动副内部有扭转弹簧,扭转弹簧施力方向为使手爪张开的方向;布兜为弹性体,手爪指尖与布兜的边缘连接,布兜开口边缘周向对称设置有两个孔状套管,第一收口拉绳和第二收口拉绳的一端均连接设置在本体内的第一电机上,沿着中心对称设置的一对儿手爪,分别穿过两个孔状套管后,固定在孔状套管终端所在的布兜边缘处;容腔拉绳一端固定在布兜底部,另

一种空间用小型对接锁紧装置.pdf
本发明的空间用小型对接锁紧装置,其包括:安装在空间站上主动机构和安装在空间试验载荷上的壳体;主动机构包括:框体、定位销安装板A、粗定位销A、精定位销A、面检测开关A、加热装置、电机、温度传感器、减速机、定位销安装板B、减速机支架、粗定位销B、面检测开关B、精定位销B、电位计、联轴器、电位计支架、小齿轮、滑动导套、光轴、大齿轮、丝杠、精定位销C、面检测开关C、定位销安装板C、锁紧检测开关、驱动机架、解锁检测开关、开关安装板、面检测开关D、锁紧销A、锁紧销B、浮动连接器插座、螺母。本发明设计了小型化、轻量化、