
基于机器视觉识别的水面清洁船装置及水面清洁方法.pdf

一只****签网


1/9
2/9
3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于机器视觉识别的水面清洁船装置及水面清洁方法.pdf
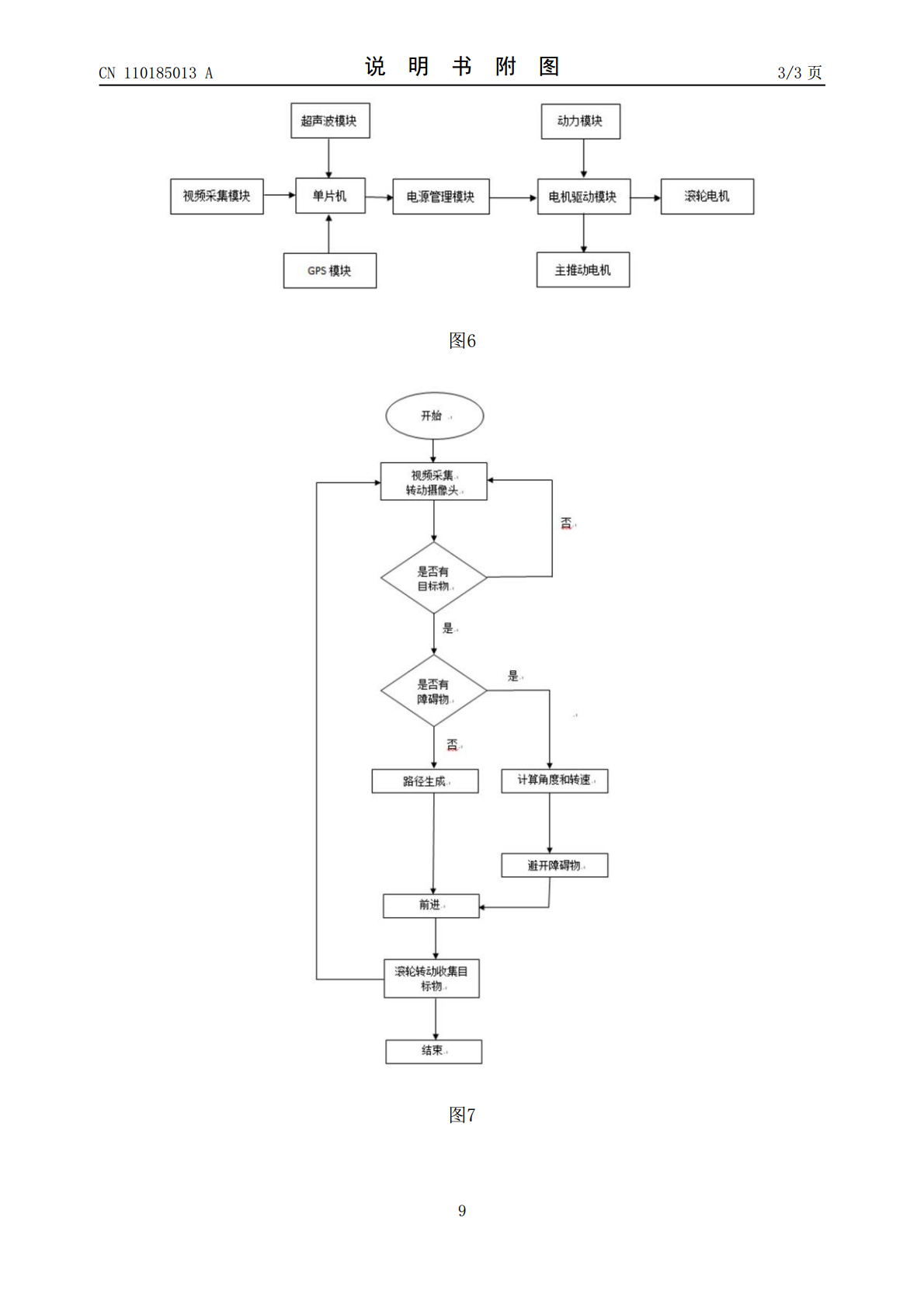
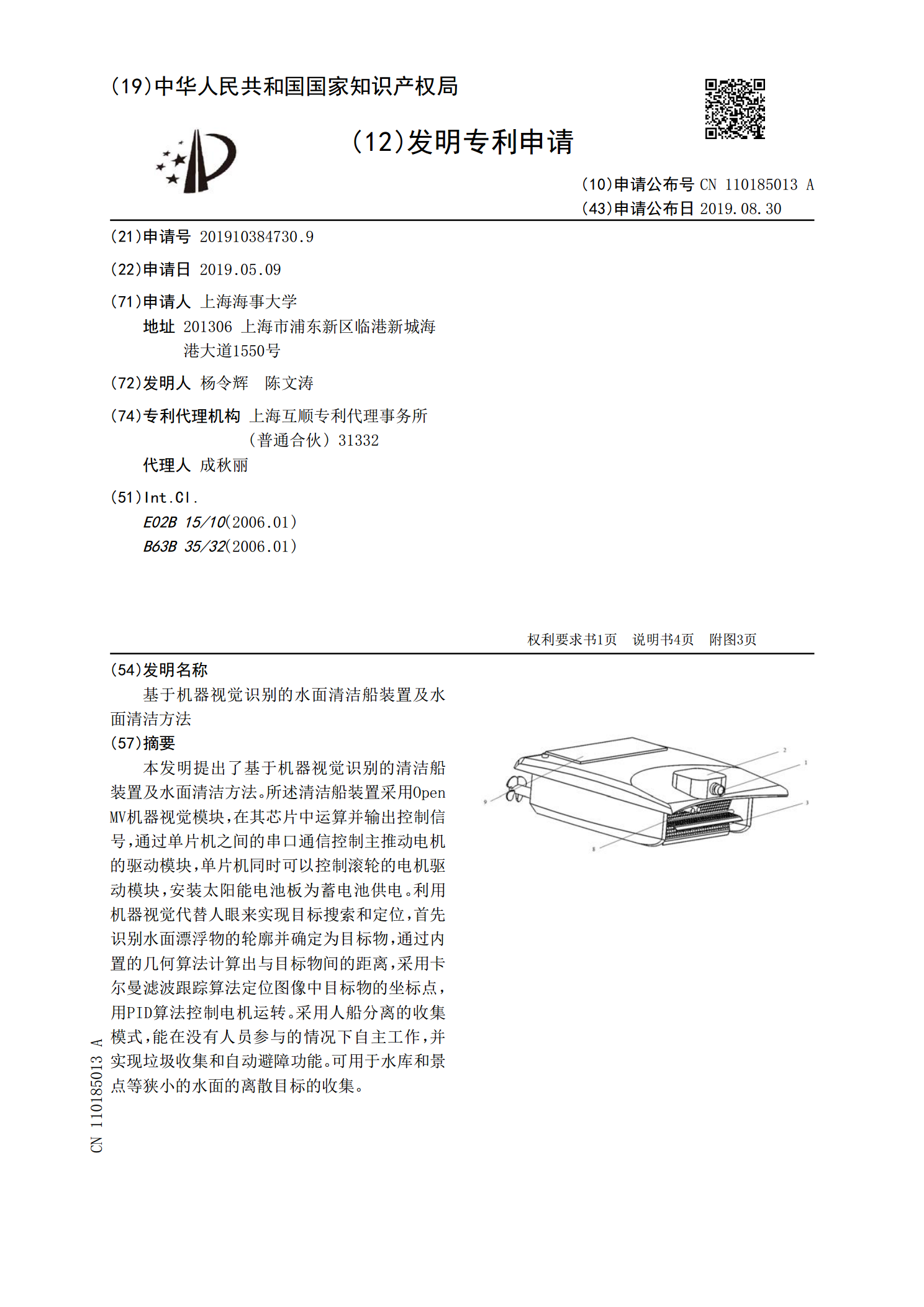
本发明提出了基于机器视觉识别的清洁船装置及水面清洁方法。所述清洁船装置采用OpenMV机器视觉模块,在其芯片中运算并输出控制信号,通过单片机之间的串口通信控制主推动电机的驱动模块,单片机同时可以控制滚轮的电机驱动模块,安装太阳能电池板为蓄电池供电。利用机器视觉代替人眼来实现目标搜索和定位,首先识别水面漂浮物的轮廓并确定为目标物,通过内置的几何算法计算出与目标物间的距离,采用卡尔曼滤波跟踪算法定位图像中目标物的坐标点,用PID算法控制电机运转。采用人船分离的收集模式,能在没有人员参与的情况下自主工作,并实
具有扒漂装置的水面清洁船.pdf
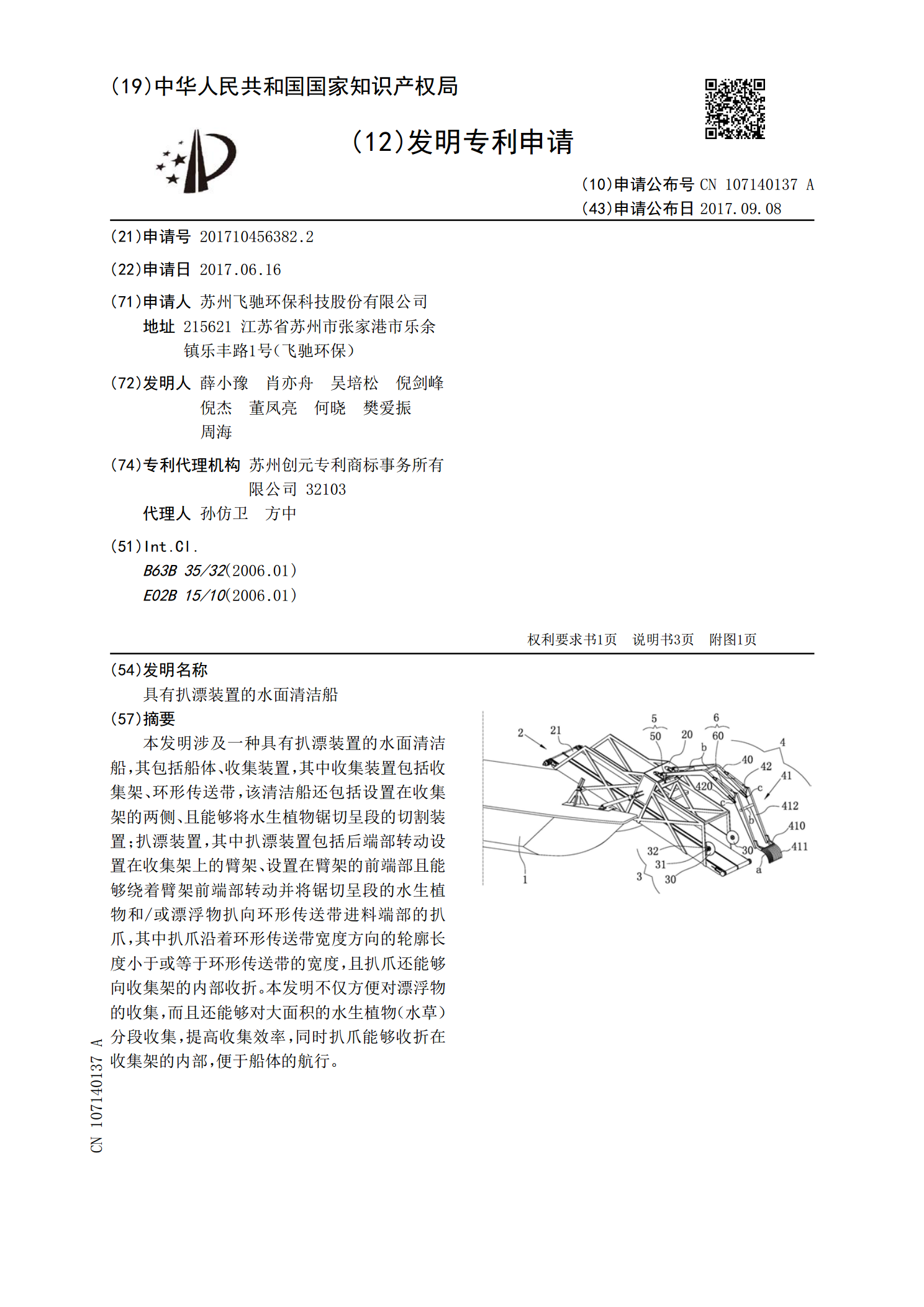
本发明涉及一种具有扒漂装置的水面清洁船,其包括船体、收集装置,其中收集装置包括收集架、环形传送带,该清洁船还包括设置在收集架的两侧、且能够将水生植物锯切呈段的切割装置;扒漂装置,其中扒漂装置包括后端部转动设置在收集架上的臂架、设置在臂架的前端部且能够绕着臂架前端部转动并将锯切呈段的水生植物和/或漂浮物扒向环形传送带进料端部的扒爪,其中扒爪沿着环形传送带宽度方向的轮廓长度小于或等于环形传送带的宽度,且扒爪还能够向收集架的内部收折。本发明不仅方便对漂浮物的收集,而且还能够对大面积的水生植物(水草)分段收集,提

一种用于水面清洁船的水藻抓斗装置.pdf
本发明涉及水面浮游植物清理领域,具体的说是一种用于水面清洁船的水藻抓斗装置,包括水藻抓斗、抓斗张合控制装置、抓斗位置控制装置、底座和水藻收集箱;水藻抓斗包括收集叉和移动叉;收集叉上设置有叉体和轨道叉;移动叉在收集叉首部时二者配合可以实现对水藻的收集,移动叉也可移动到收集叉尾部并将水藻带入水藻收集箱内;抓斗张合控制装置通过控制前后侧板之间的距离,来使带齿皮带在张合传动齿轮上绷紧,并通过带齿皮带的运动来控制移动叉旋转;抓斗位置控制装置通过带齿皮带的运动来精确控制移动叉的位置。本发明采用直线形的收集路线,能快速
一种小型水域水面清洁船.pdf
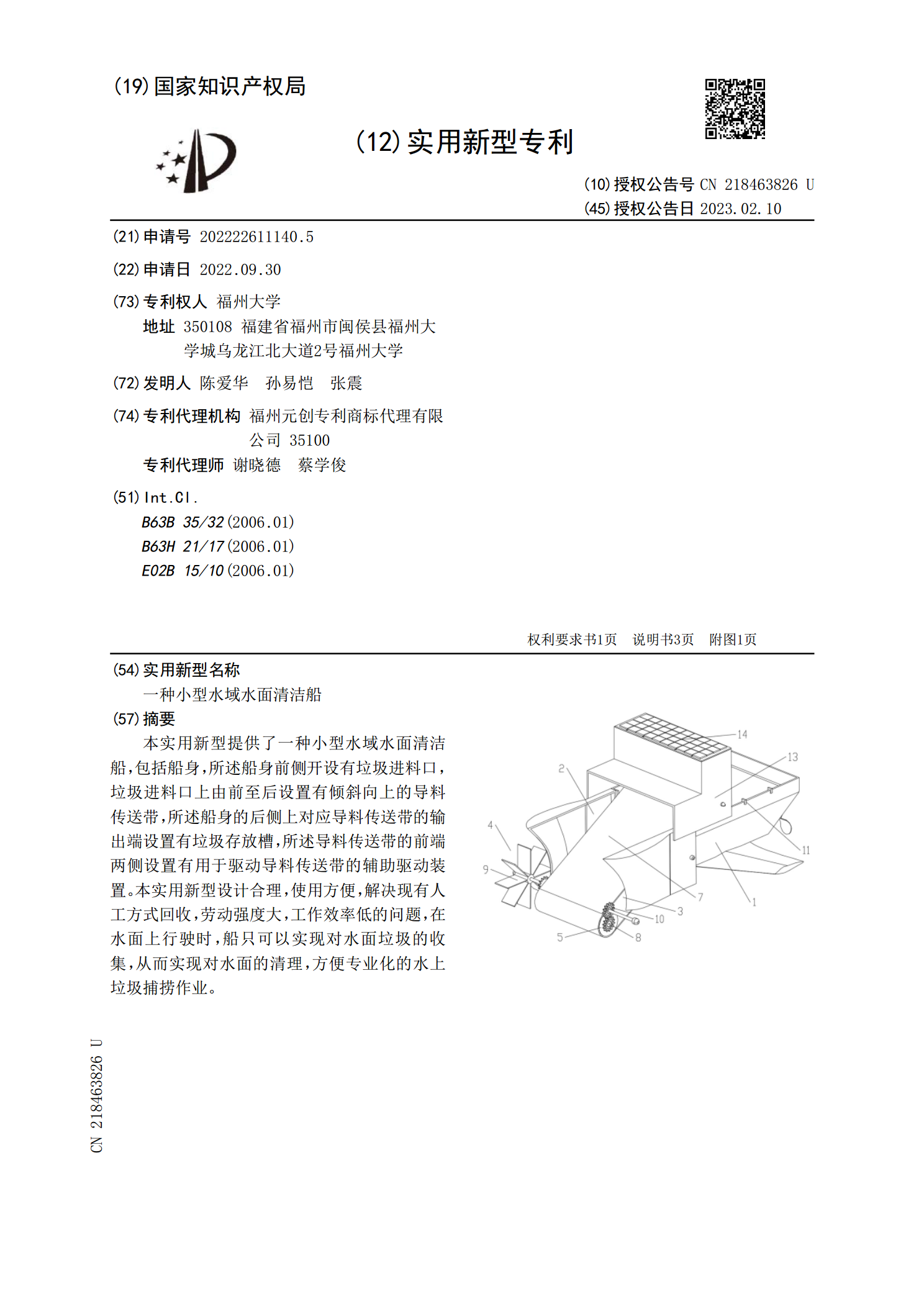
本实用新型提供了一种小型水域水面清洁船,包括船身,所述船身前侧开设有垃圾进料口,垃圾进料口上由前至后设置有倾斜向上的导料传送带,所述船身的后侧上对应导料传送带的输出端设置有垃圾存放槽,所述导料传送带的前端两侧设置有用于驱动导料传送带的辅助驱动装置。本实用新型设计合理,使用方便,解决现有人工方式回收,劳动强度大,工作效率低的问题,在水面上行驶时,船只可以实现对水面垃圾的收集,从而实现对水面的清理,方便专业化的水上垃圾捕捞作业。
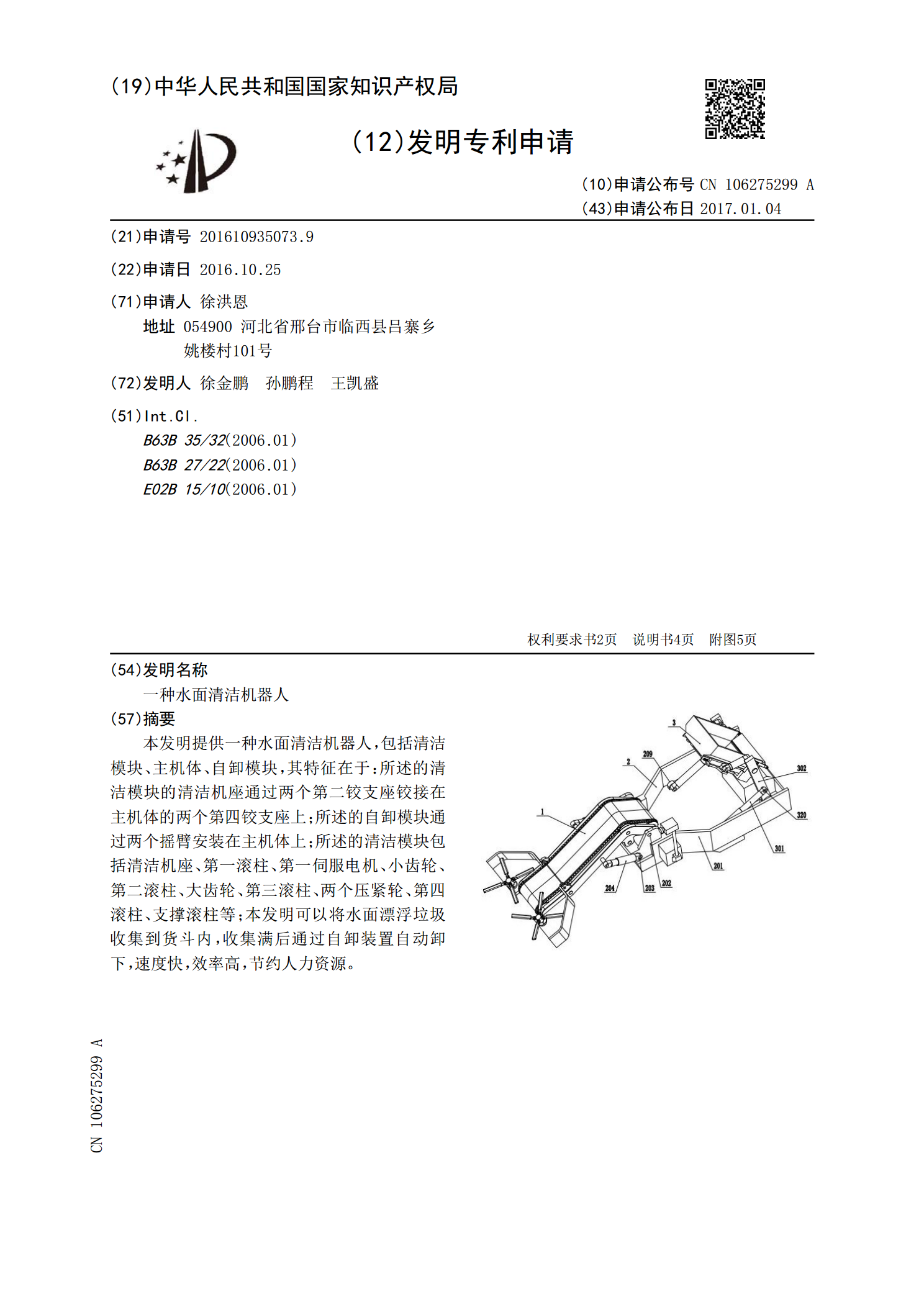
一种水面清洁机器人.pdf
本发明提供一种水面清洁机器人,包括清洁模块、主机体、自卸模块,其特征在于:所述的清洁模块的清洁机座通过两个第二铰支座铰接在主机体的两个第四铰支座上;所述的自卸模块通过两个摇臂安装在主机体上;所述的清洁模块包括清洁机座、第一滚柱、第一伺服电机、小齿轮、第二滚柱、大齿轮、第三滚柱、两个压紧轮、第四滚柱、支撑滚柱等;本发明可以将水面漂浮垃圾收集到货斗内,收集满后通过自卸装置自动卸下,速度快,效率高,节约人力资源。