
磁力自驱动小车以及用于其的导轨测量装置和方法.pdf

书生****35

1/8

2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁力自驱动小车以及用于其的导轨测量装置和方法.pdf
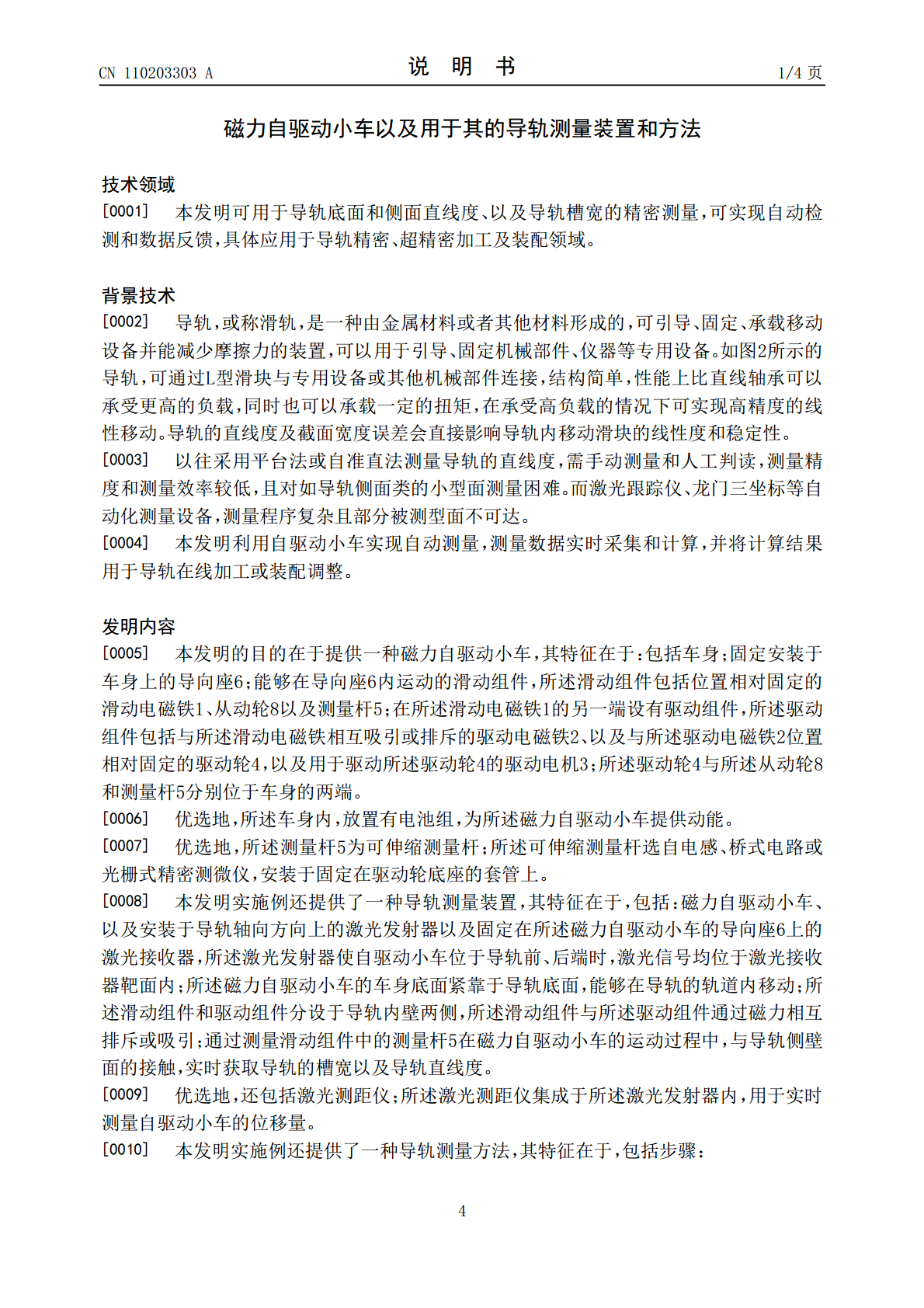
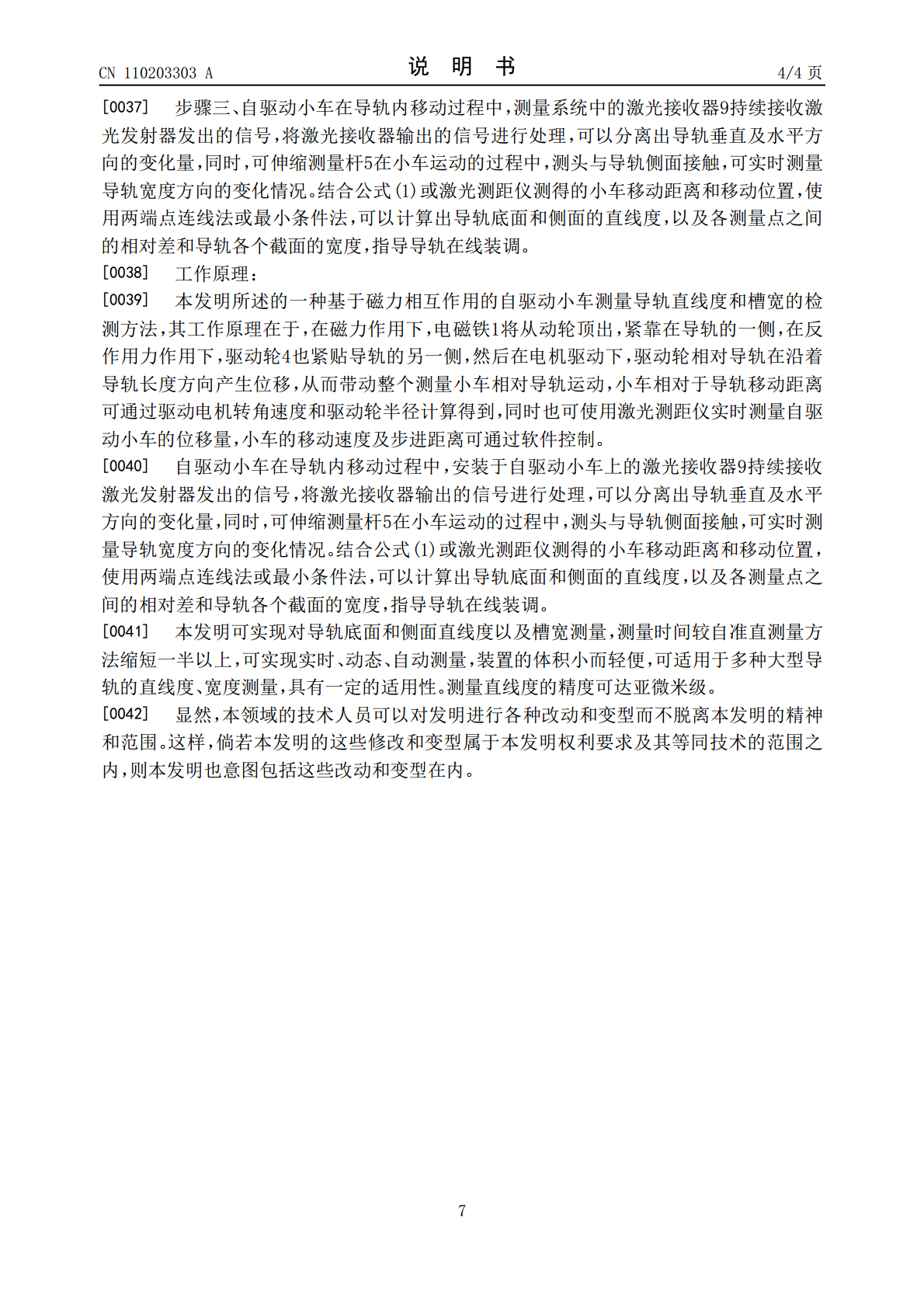
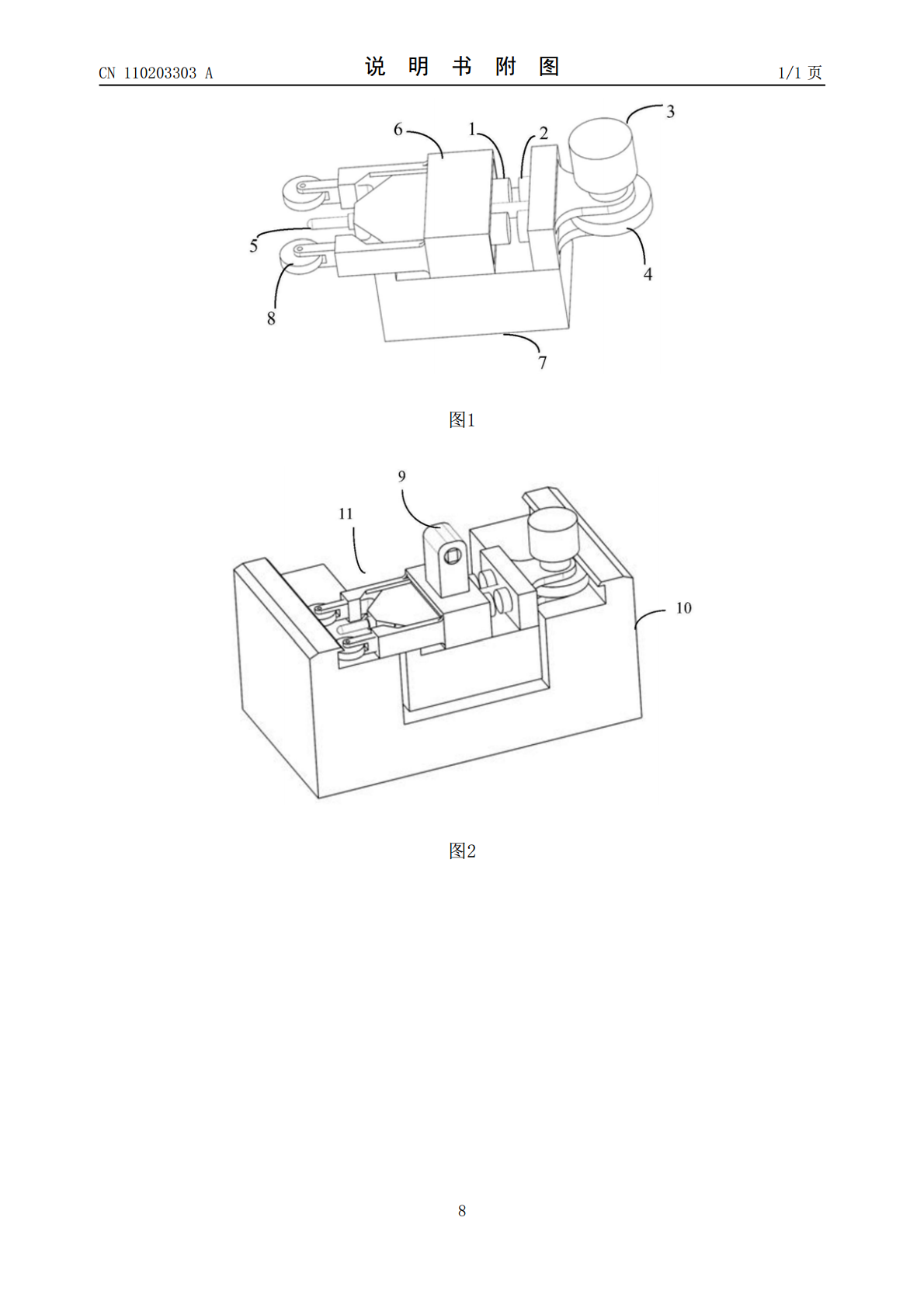
本发明实施例提供了一种磁力自驱动小车,其特征在于:包括车身;固定安装于车身上的导向座(6);能够在导向座(6)内运动的滑动组件,所述滑动组件包括位置相对固定的滑动电磁铁(1)、从动轮(8)以及测量杆(5);在所述滑动电磁铁(1)的另一端设有驱动组件,所述驱动组件包括与所述滑动电磁铁相互吸引或排斥的驱动电磁铁(2)、以及与所述驱动电磁铁(2)位置相对固定的驱动轮(4),以及用于驱动所述驱动轮(4)的驱动电机(3);所述驱动轮(4)与所述从动轮(8)和测量杆(5)分别位于车身的两端;通过测量滑动组件中的测量杆
适用于曲线导轨的自驱动导轨小车.pdf
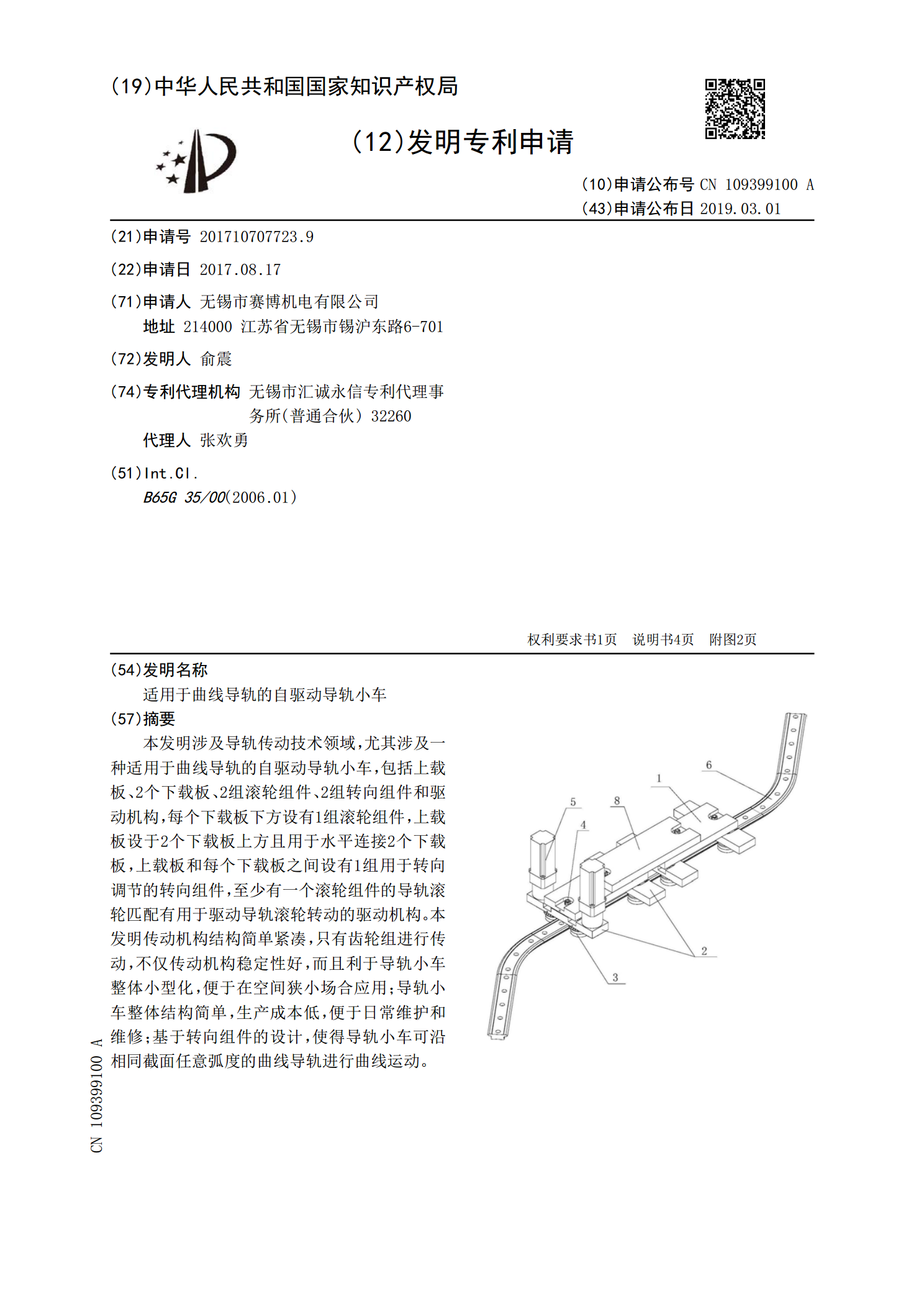
本发明涉及导轨传动技术领域,尤其涉及一种适用于曲线导轨的自驱动导轨小车,包括上载板、2个下载板、2组滚轮组件、2组转向组件和驱动机构,每个下载板下方设有1组滚轮组件,上载板设于2个下载板上方且用于水平连接2个下载板,上载板和每个下载板之间设有1组用于转向调节的转向组件,至少有一个滚轮组件的导轨滚轮匹配有用于驱动导轨滚轮转动的驱动机构。本发明传动机构结构简单紧凑,只有齿轮组进行传动,不仅传动机构稳定性好,而且利于导轨小车整体小型化,便于在空间狭小场合应用;导轨小车整体结构简单,生产成本低,便于日常维护和维修

显示装置以及用于驱动其的方法.pdf
在本公开内容的实施方式中,提供了一种显示装置,其包括:在第一电力电压的线与第二电力电压的线之间的多个子像素,所述多个子像素被配置成被提供有驱动电流并且响应于驱动电流而发光;以及电源单元,其被配置成基于外部输入电压生成第一电力电压和第二电力电压,其中,当外部输入电压对应于预设的最大电压与最小电压之间时,电源单元生成电力,以及当外部输入电压对应于预设的基准电压与最小电压之间时,电源单元减小第一电力电压与第二电力电压之间的电压差。

自驱动滚轮导轨小车.pdf
本发明涉及导轨传动技术领域,尤其涉及一种自驱动滚轮导轨小车,包括载板及对称设于载板下方的两组滚轮组件,每组滚轮组件包括2个导轨滚轮、2组轴承、正心螺栓和偏心螺栓,2组轴承分别嵌入2个导轨滚轮的中心孔中,正心螺栓自下而上穿过一组轴承并将其固定于载板下方,偏心螺栓以同样的方式固定另一组轴承,2组轴承与载板之间均设有用于防止轴承与载板摩擦的垫块,2个导轨滚轮对称卡合于导轨轨道两侧,至少一个导轨滚轮匹配有用于驱动导轨滚轮转动的驱动机构,驱动机构包括减速电机、驱动齿轮和从动齿轮,从动齿轮同心连接于导轨滚轮顶部的外周

用于自电容测量的方法和装置.pdf
本申请案涉及用于自电容测量的方法和装置。在一个实施例中,一种方法包含修改触摸传感器的电容的电荷量。所述经修改的电荷量使得所述电容处的电压为第一预定电压电平。所述方法还包含将第一预定量的电荷施加到所述电容。所述将所述第一预定量的电荷施加到所述电容将所述电容处的所述电压从所述第一预定电压电平修改为第一充电电压电平。所述方法还包含确定所述第一充电电压电平与参考电压电平之间的第一差;以及基于所述第一差来确定是否已发生到所述触摸传感器的触摸输入。