
一种管道机器人内封堵系统.pdf

睿达****的的

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管道机器人内封堵系统.pdf
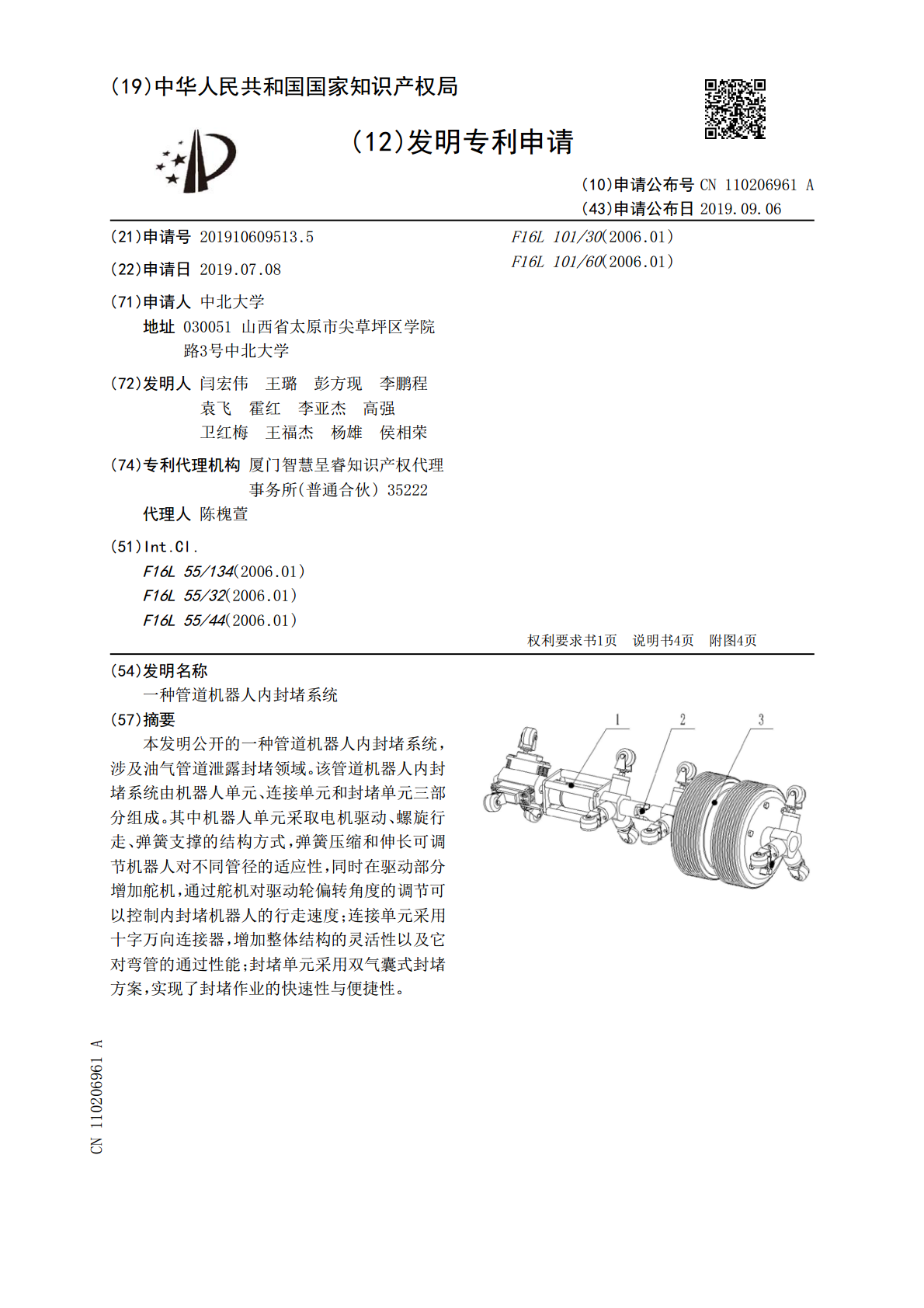
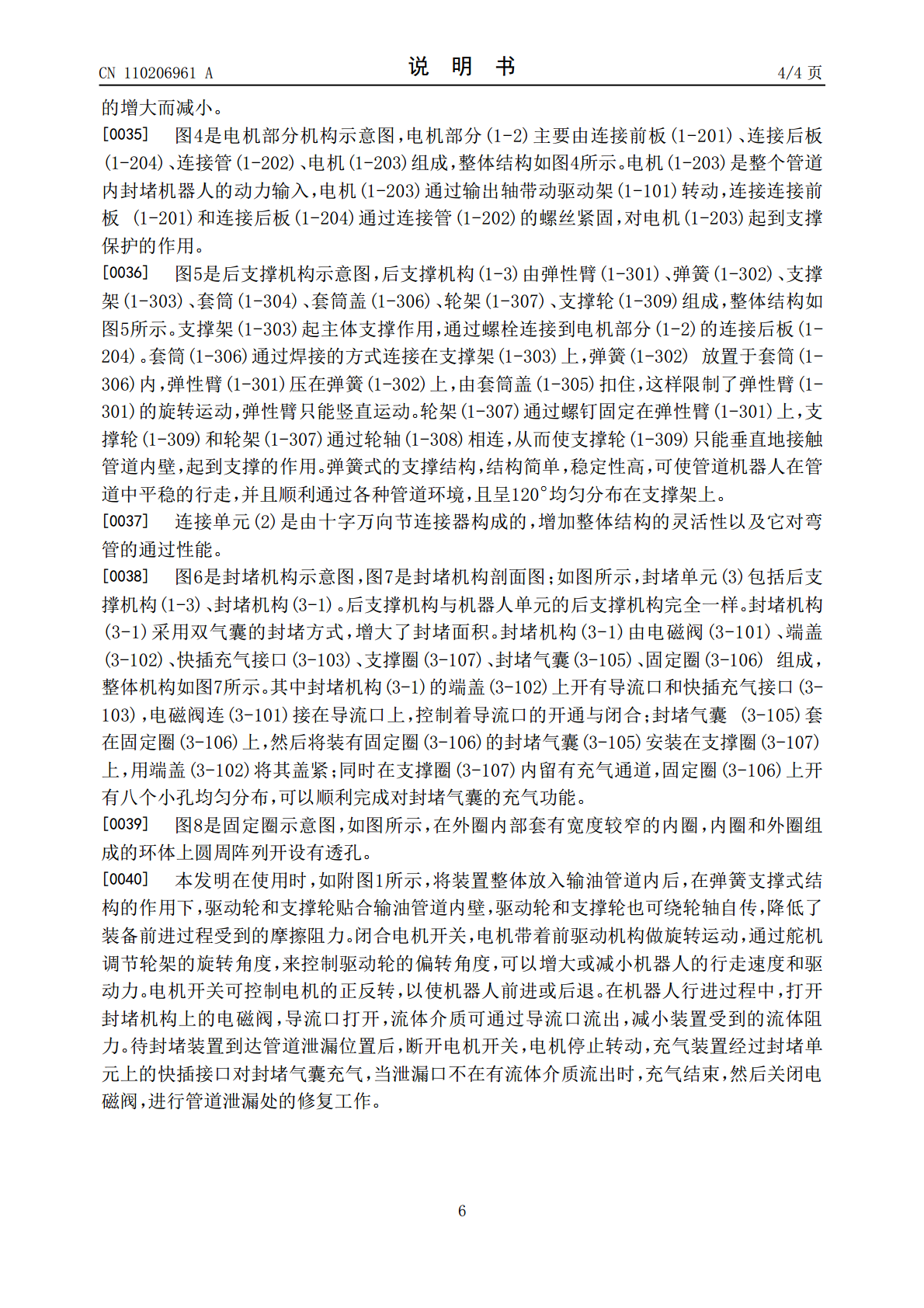
本发明公开的一种管道机器人内封堵系统,涉及油气管道泄露封堵领域。该管道机器人内封堵系统由机器人单元、连接单元和封堵单元三部分组成。其中机器人单元采取电机驱动、螺旋行走、弹簧支撑的结构方式,弹簧压缩和伸长可调节机器人对不同管径的适应性,同时在驱动部分增加舵机,通过舵机对驱动轮偏转角度的调节可以控制内封堵机器人的行走速度;连接单元采用十字万向连接器,增加整体结构的灵活性以及它对弯管的通过性能;封堵单元采用双气囊式封堵方案,实现了封堵作业的快速性与便捷性。

一种基于管道封堵的维护监控系统.pdf
本发明公开了一种基于管道封堵的维护监控系统,其结构包括支撑装置,通过在管体底端中部设置支撑装置,通过按压凸块便于使用者向下扳动伸缩杆延伸到适当长度经缓冲垫与地面连接固定,经凸块与固定杆中固定孔固定,通过挡板对管体支撑经固定夹板内侧与管体一端贴合,接着通过扳动卡钮致使滑动夹板经滑槽向内滑动与管体另一端贴合,按压卡钮与挡板内侧卡槽连接防止滑动夹板滑动,便于对管体进行夹固,达到对管道监控装置进行稳定支撑,防止管道监控装置与管道连接时发生晃动,提高设备安装效率的有益效果。

管道内快速自锁封堵装置.pdf
本发明管道内快速自锁封堵装置,属于管道封堵技术领域;所要解决的技术问题为提供一种封堵可靠并实现可导流的管道内快速自锁封堵装置;采用的技术方案为:封堵单元为充气式封堵装置,且其上具有轴向通孔;牵引单元为空心管上安装电控阀门的结构,空心管上开有外螺纹;张紧单元的结构为:固定座和活动座上均具有轴向通孔,之间由弹簧连接,第一支撑杆的一端铰接在固定座上,另一端铰接有防滑块,第二支撑杆的一端与活动座铰接,另一端与第一支撑杆的中部铰接;空心管穿过张紧单元后与封堵单元固定在一起,第一齿轮和套筒套装在空心管上,电机的输出轴
一种管道内窥机器人.pdf
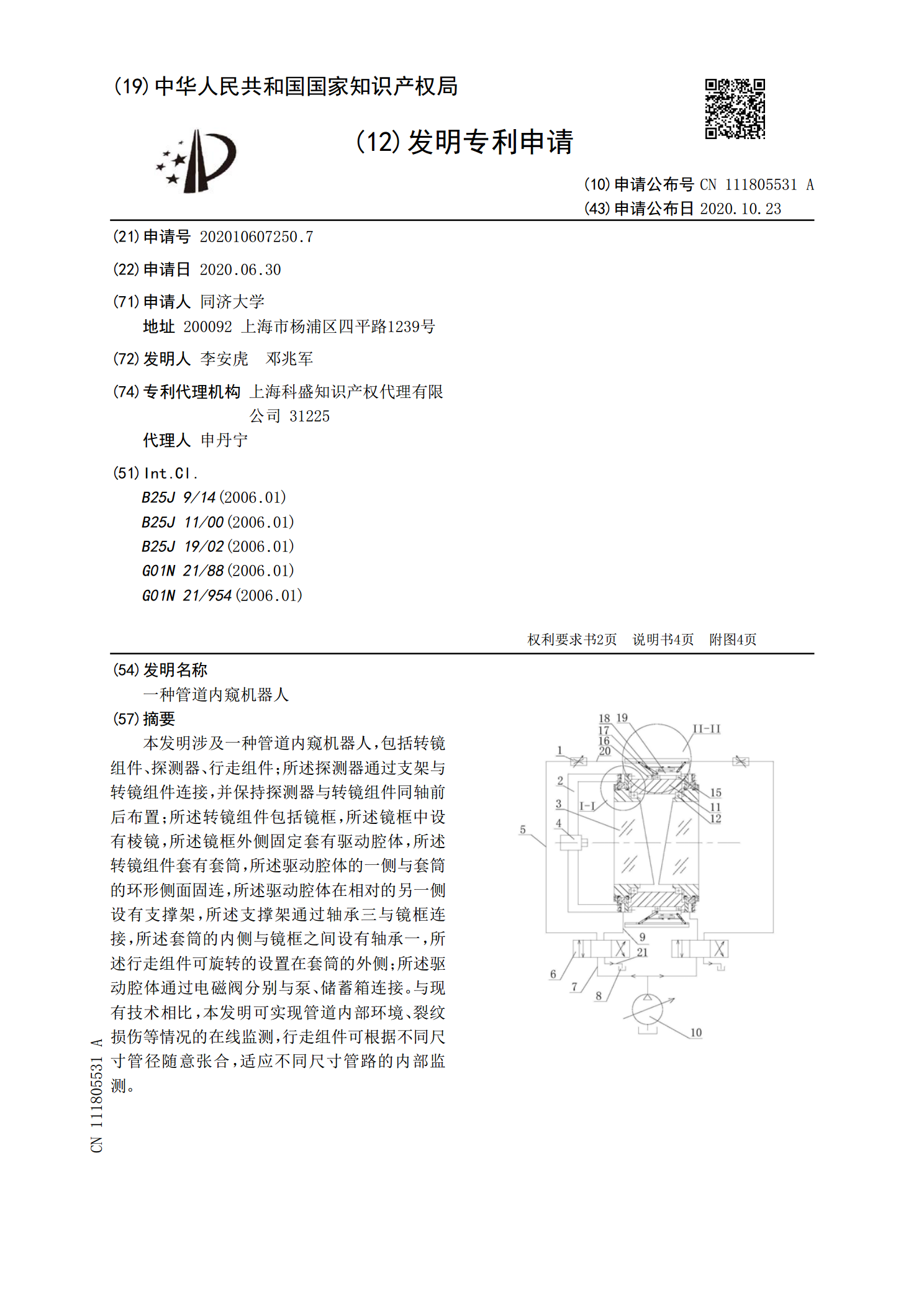
本发明涉及一种管道内窥机器人,包括转镜组件、探测器、行走组件;所述探测器通过支架与转镜组件连接,并保持探测器与转镜组件同轴前后布置;所述转镜组件包括镜框,所述镜框中设有棱镜,所述镜框外侧固定套有驱动腔体,所述转镜组件套有套筒,所述驱动腔体的一侧与套筒的环形侧面固连,所述驱动腔体在相对的另一侧设有支撑架,所述支撑架通过轴承三与镜框连接,所述套筒的内侧与镜框之间设有轴承一,所述行走组件可旋转的设置在套筒的外侧;所述驱动腔体通过电磁阀分别与泵、储蓄箱连接。与现有技术相比,本发明可实现管道内部环境、裂纹损伤等情况
一种动脉瘤瘤内封堵装置及动脉瘤瘤内封堵系统.pdf
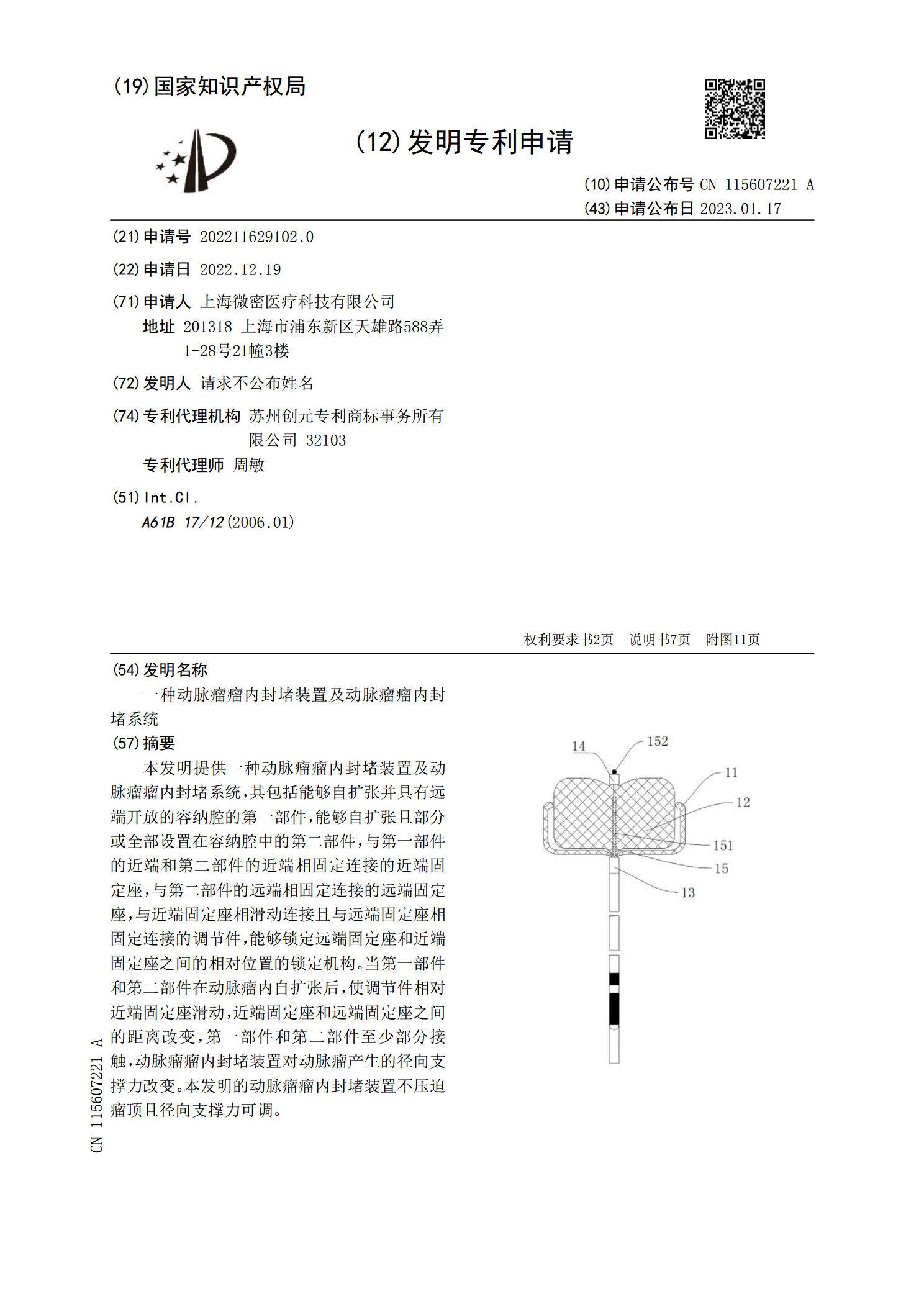
本发明提供一种动脉瘤瘤内封堵装置及动脉瘤瘤内封堵系统,其包括能够自扩张并具有远端开放的容纳腔的第一部件,能够自扩张且部分或全部设置在容纳腔中的第二部件,与第一部件的近端和第二部件的近端相固定连接的近端固定座,与第二部件的远端相固定连接的远端固定座,与近端固定座相滑动连接且与远端固定座相固定连接的调节件,能够锁定远端固定座和近端固定座之间的相对位置的锁定机构。当第一部件和第二部件在动脉瘤内自扩张后,使调节件相对近端固定座滑动,近端固定座和远端固定座之间的距离改变,第一部件和第二部件至少部分接触,动脉瘤瘤内封