
一种轮足机器人的隔振装置及其主动隔振的控制方法.pdf

一条****然后


1/9

2/9
3/9

4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮足机器人的隔振装置及其主动隔振的控制方法.pdf
本发明公开了一种轮足机器人的隔振装置,轮足机器人包括机身、两条以上支撑腿及足端,支撑腿采用倒置的Steward平台;每个Steward平台包括上平台、下平台及六个可伸缩缸;隔振装置包括:主动隔振装置和被动隔振装置;主动隔振装置与轮足机器人机身上的控制单元无线连接,其一端与轮足机器人的机身相连,另一端与轮足机器人的上平台相连,用于实时检测轮足机器人每个可伸缩缸受到的拉力/压力值并传递给控制单元,控制单元根据每个可伸缩缸实时受到的拉力/压力值与设定拉力/压力阈值的差值实时控制对应可伸缩缸的伸缩量,从而达到主动

一种半主动隔振装置.pdf
一种半主动隔振装置,筒状壳体的底部由底板封闭,筒状壳体内在靠近上端开口的位置设有一环状连接板,环状连接板的外圆周与筒状壳体的内壁固定连接;环状连接板的内部中心设有载物台;载物台与环状连接板之间通过多个直片弹簧连接;载物台内部装配有永磁体;电磁铁与永磁体相对应地固定安装在底板上,电磁铁与永磁体之间留有气隙,且电磁铁的上端在通电后与永磁体的下端磁极相同;位移监测控制系统由位移传感器、信号转换器、电流控制器和智能控制终端组成,位移传感器固定设置在载物台的下方,位移传感器通过信号转换器与智能控制终端的输入端连接,
多隔振器布置方法以及隔振装置.pdf
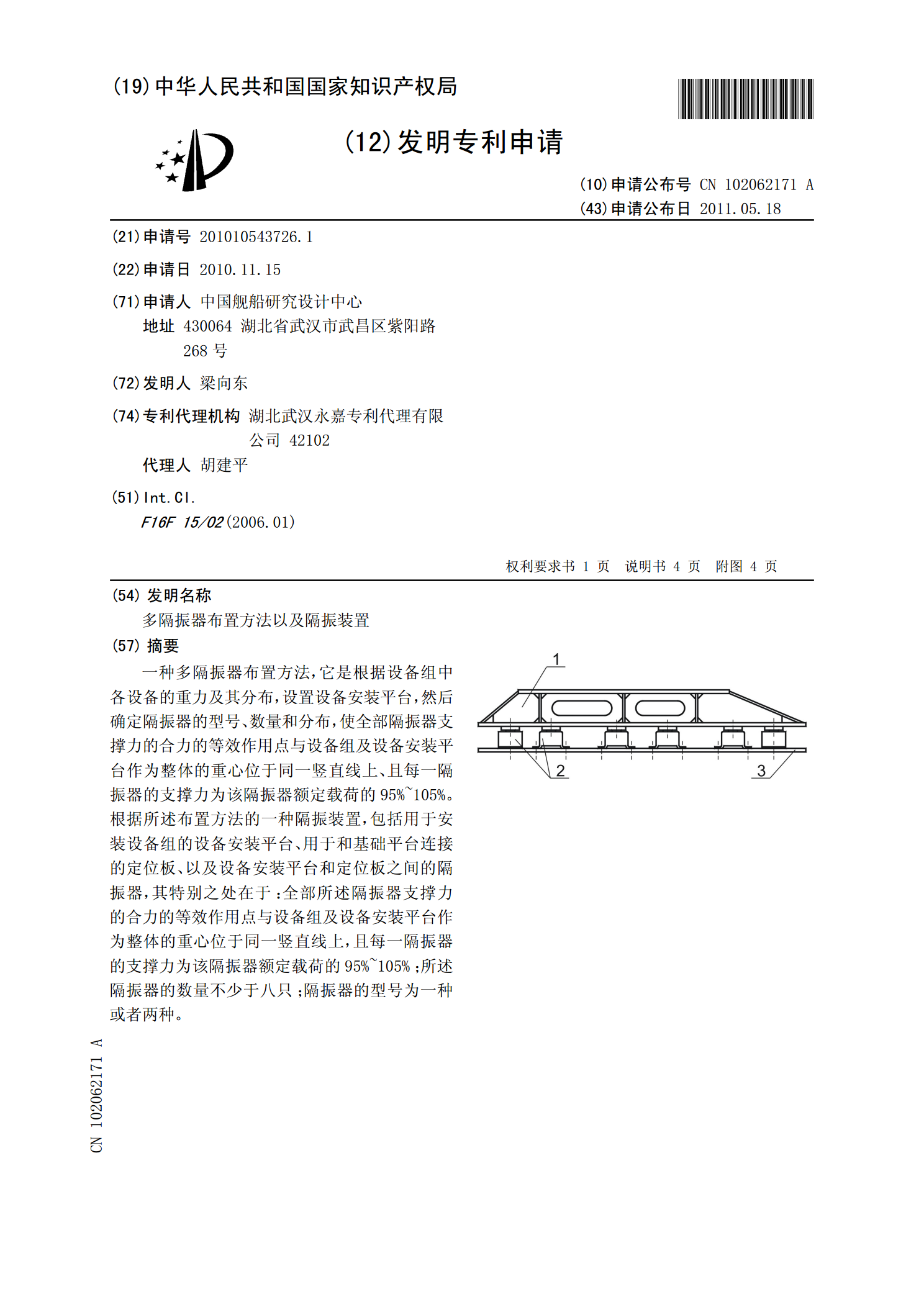
一种多隔振器布置方法,它是根据设备组中各设备的重力及其分布,设置设备安装平台,然后确定隔振器的型号、数量和分布,使全部隔振器支撑力的合力的等效作用点与设备组及设备安装平台作为整体的重心位于同一竖直线上、且每一隔振器的支撑力为该隔振器额定载荷的95%~105%。根据所述布置方法的一种隔振装置,包括用于安装设备组的设备安装平台、用于和基础平台连接的定位板、以及设备安装平台和定位板之间的隔振器,其特别之处在于:全部所述隔振器支撑力的合力的等效作用点与设备组及设备安装平台作为整体的重心位于同一竖直线上,且每一隔振
一种新型主动控制隔振平台.pdf
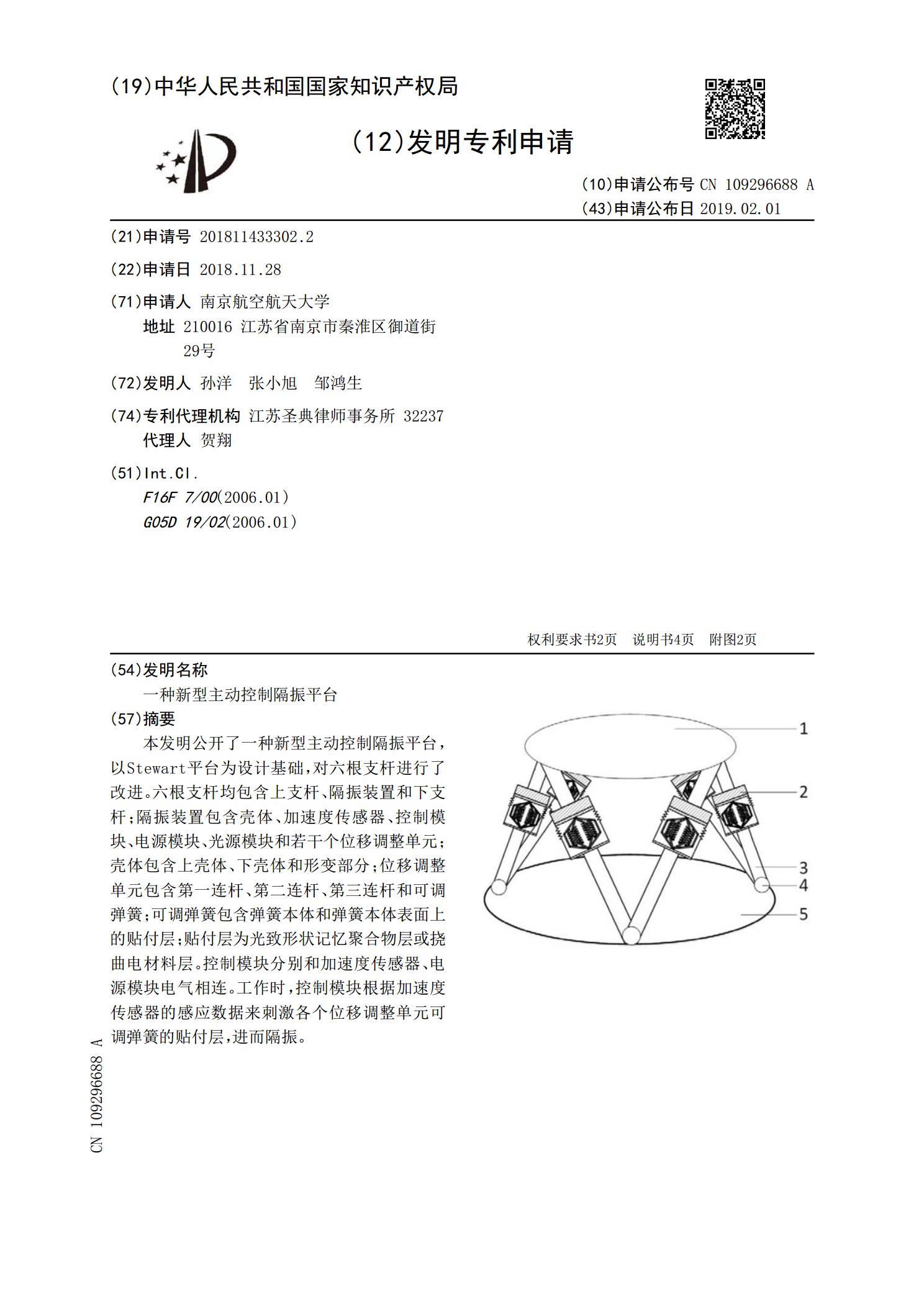
本发明公开了一种新型主动控制隔振平台,以Stewart平台为设计基础,对六根支杆进行了改进。六根支杆均包含上支杆、隔振装置和下支杆;隔振装置包含壳体、加速度传感器、控制模块、电源模块、光源模块和若干个位移调整单元;壳体包含上壳体、下壳体和形变部分;位移调整单元包含第一连杆、第二连杆、第三连杆和可调弹簧;可调弹簧包含弹簧本体和弹簧本体表面上的贴付层;贴付层为光致形状记忆聚合物层或挠曲电材料层。控制模块分别和加速度传感器、电源模块电气相连。工作时,控制模块根据加速度传感器的感应数据来刺激各个位移调整单元可调弹

复合隔振器隔振装置的性能研究.docx
复合隔振器隔振装置的性能研究隔振是一种将机械系统之间传递的振动减弱或消除的技术,其应用广泛,特别是在工业自动化、精密加工、航空航天和射电望远镜等领域。复合隔振器是一种新型隔振系统,采用多种不同的隔振材料的组合,优化设计,具有更好的隔振效果和更宽的隔振频率带宽。本文将从复合隔振器的隔振原理、性能分析、优化设计以及应用等方面进行论述。一、复合隔振器的隔振原理复合隔振器是由多层介质堆叠而成,其中每一层材料的特性和结构都有所不同,从而形成了多个不同频率的复共振系统。通过合理选择各层材料的厚度、弹性模量和密度等参数