
工件轮廓检测的恒线速度控制方法.pdf

高格****gu

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
工件轮廓检测的恒线速度控制方法.pdf
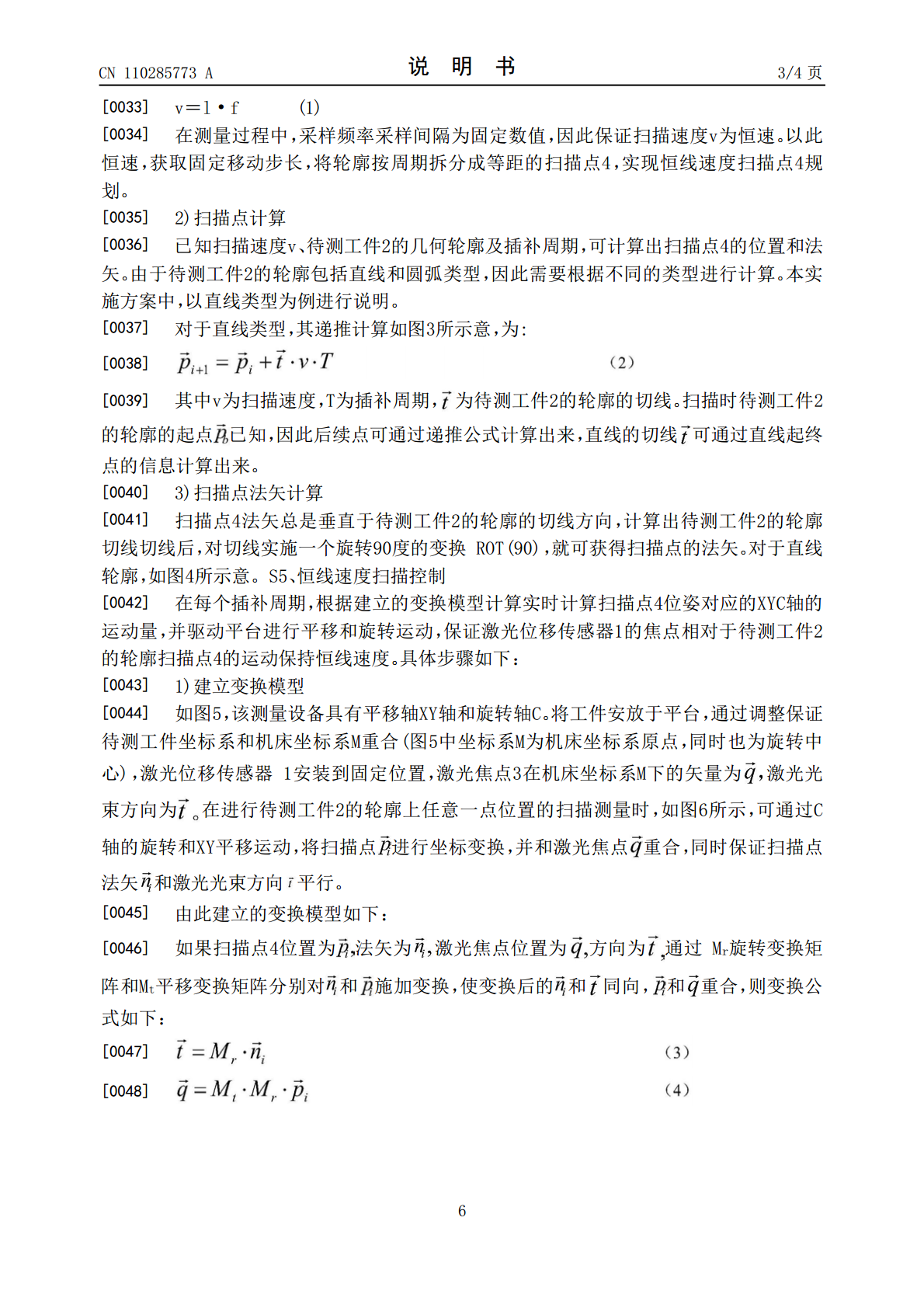
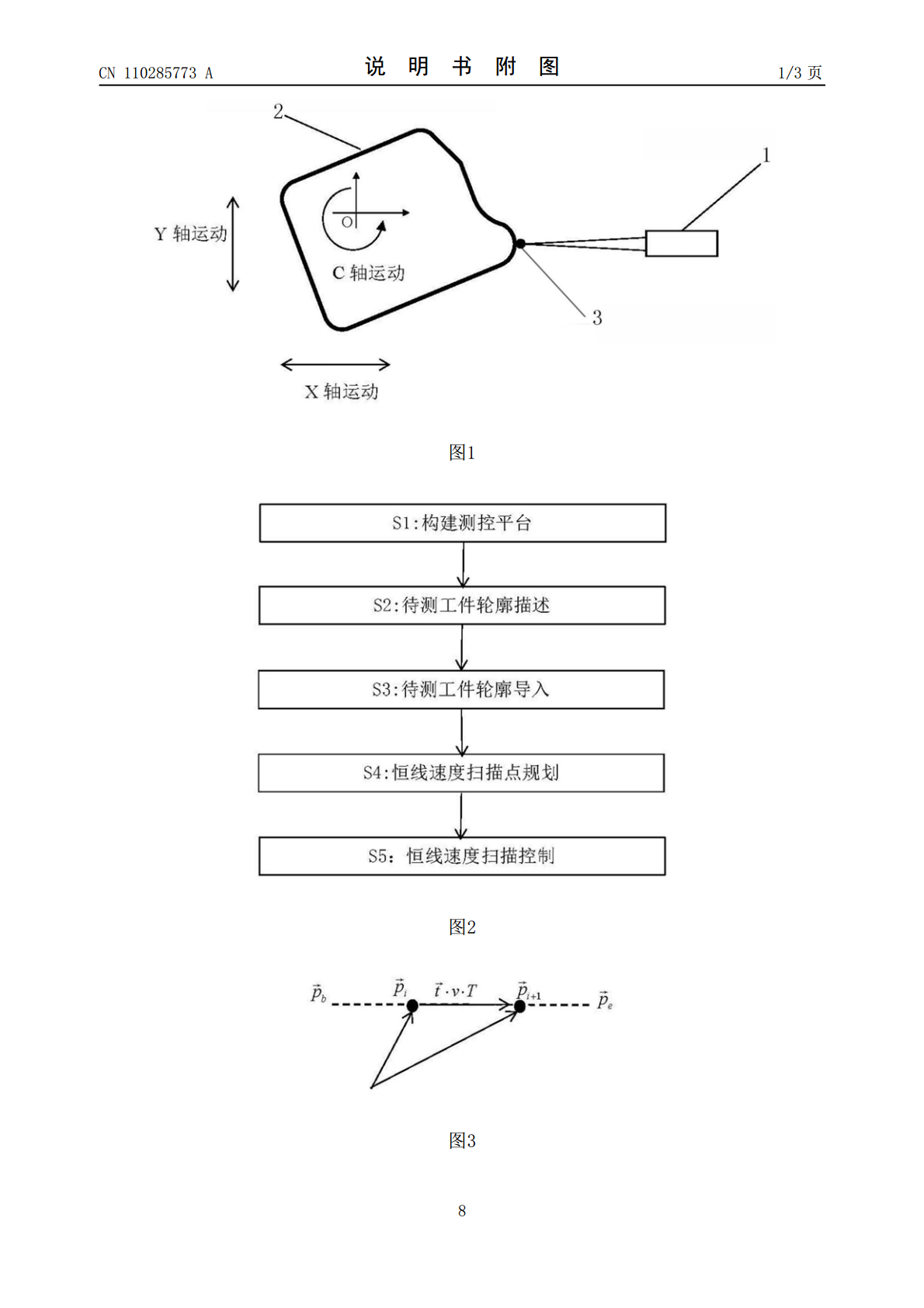
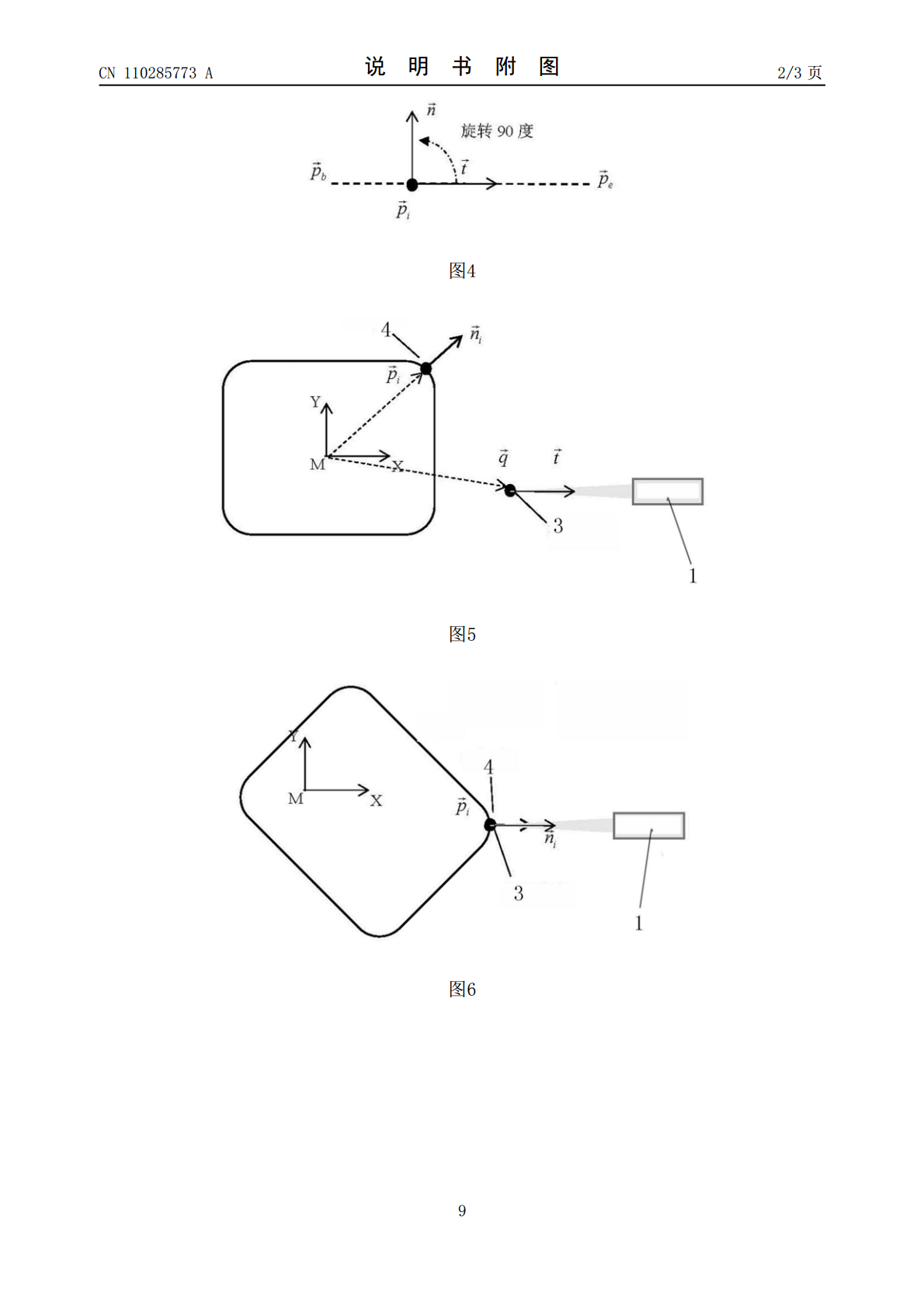
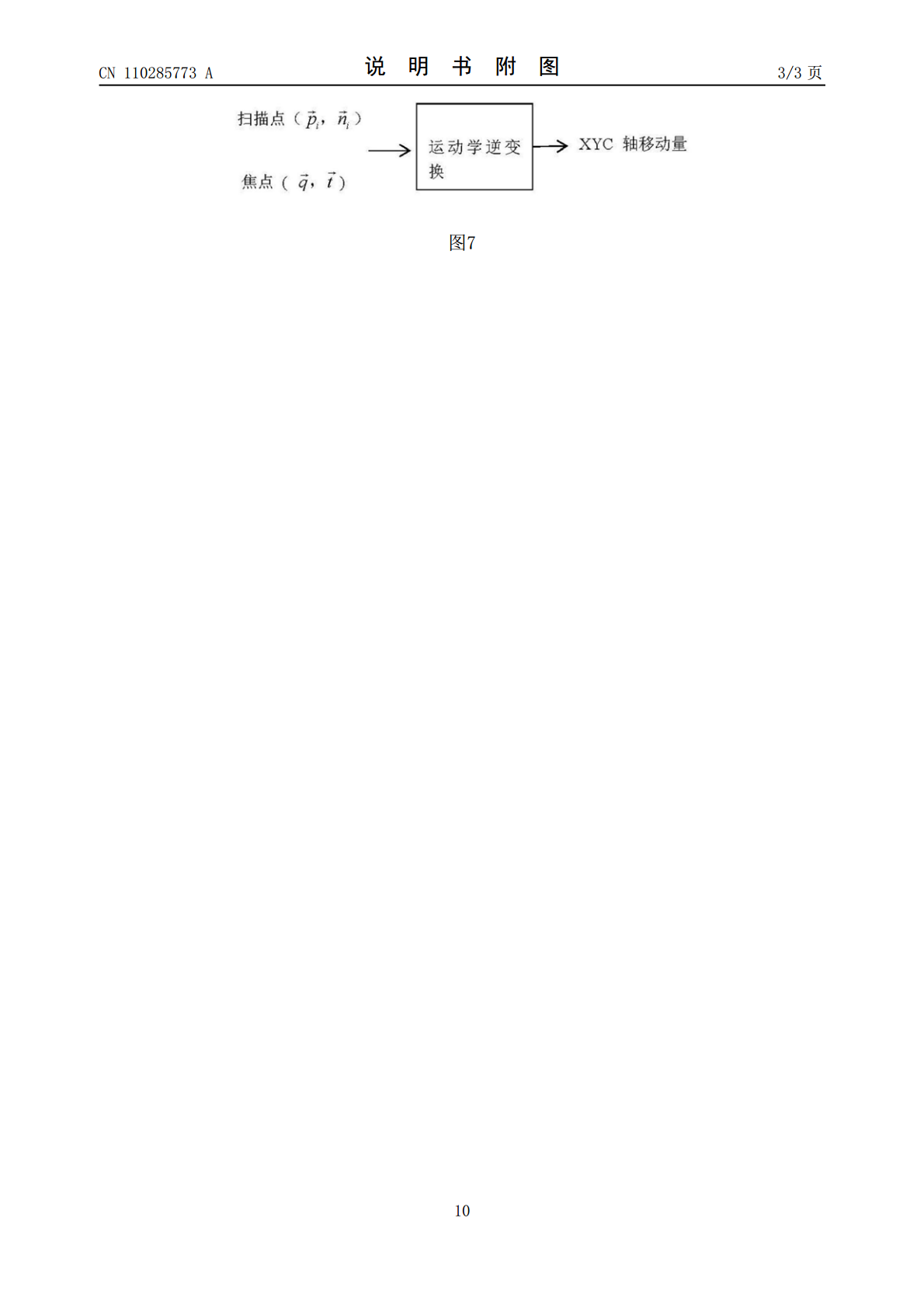
一种工件轮廓检测的恒线速度控制方法,激光位移传感器位置固定,通过控制工作台的平移和旋转运动,工件和激光位移传感器焦点产生相对运动,在运动过程中,保证传感器的焦点始终在工件轮廓的表面,且激光传感器焦点相对于工件运动的线速度保持恒定。本发明解决了传统轮廓检测中采用旋转方向中等角度但轮廓上不等距的问题,具有工件轮廓恒线速运动的优点,保证了工件轮廓上检测点的均匀选取。

工件的椭圆轮廓检测方法研究.pdf
针对双目视觉测量圆弧工件的过程中,空间圆的形状在单个相机的拍摄下,投影到一个平面会形成椭圆。圆弧边缘上存在一些缺口或者缺陷等,因此对椭圆的正确拟合,排除边缘错误点,对后续的点的正确匹配以及空间圆半径的求解产生重要影响。本文在Hough变换的基础上,利用改进的RANSAC算法拟合多条直线求得椭圆中心点。同时,利用椭圆对称性,将Hough变换在对称点上对余下三个参数进行投票,减少计算量的同时增强准确性。最后,通过实验验证该方法的可行性。
工件轮廓扫描系统及方法.pdf
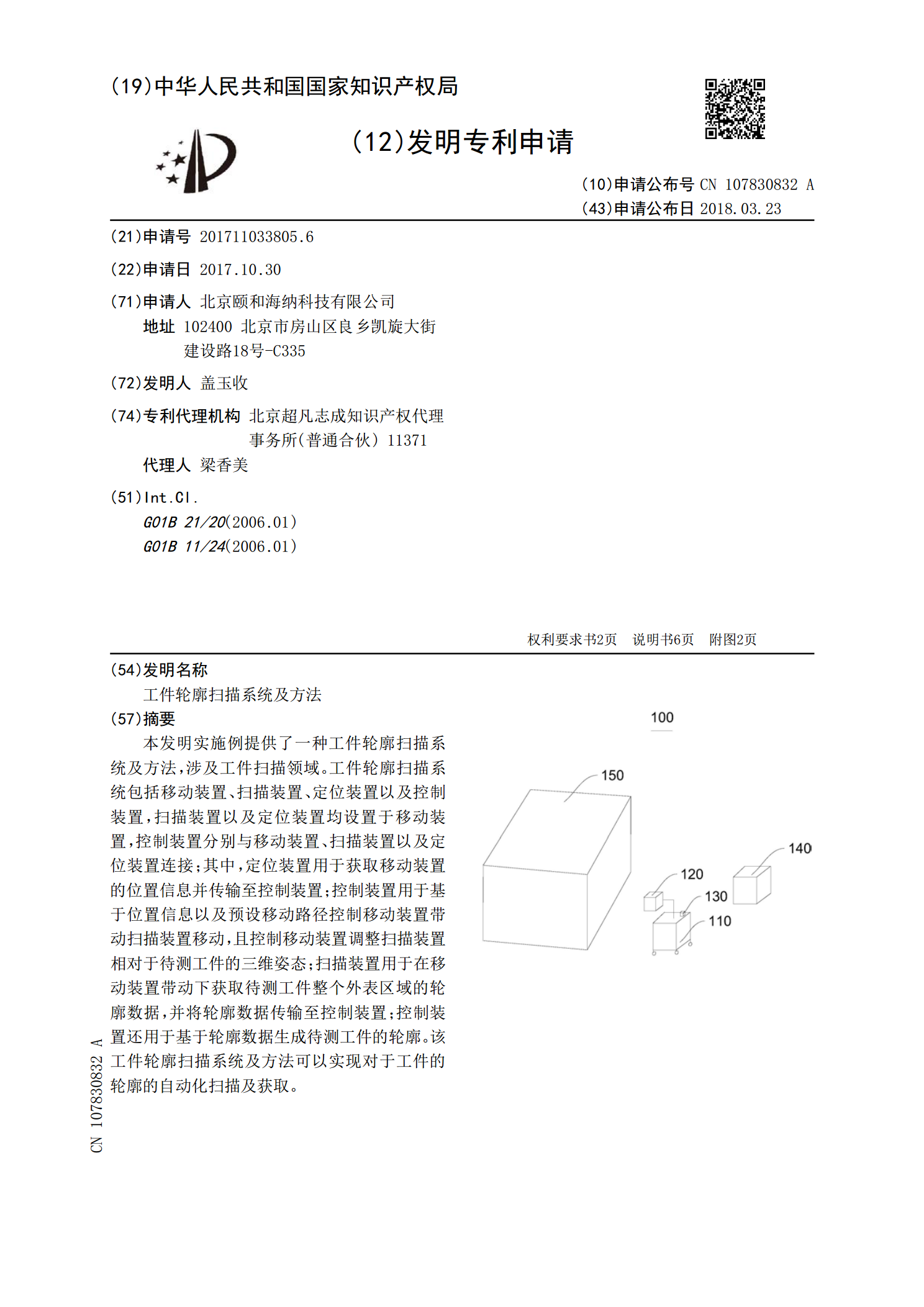
本发明实施例提供了一种工件轮廓扫描系统及方法,涉及工件扫描领域。工件轮廓扫描系统包括移动装置、扫描装置、定位装置以及控制装置,扫描装置以及定位装置均设置于移动装置,控制装置分别与移动装置、扫描装置以及定位装置连接;其中,定位装置用于获取移动装置的位置信息并传输至控制装置;控制装置用于基于位置信息以及预设移动路径控制移动装置带动扫描装置移动,且控制移动装置调整扫描装置相对于待测工件的三维姿态;扫描装置用于在移动装置带动下获取待测工件整个外表区域的轮廓数据,并将轮廓数据传输至控制装置;控制装置还用于基于轮廓数
用于磨削工件的齿形或轮廓的方法.pdf
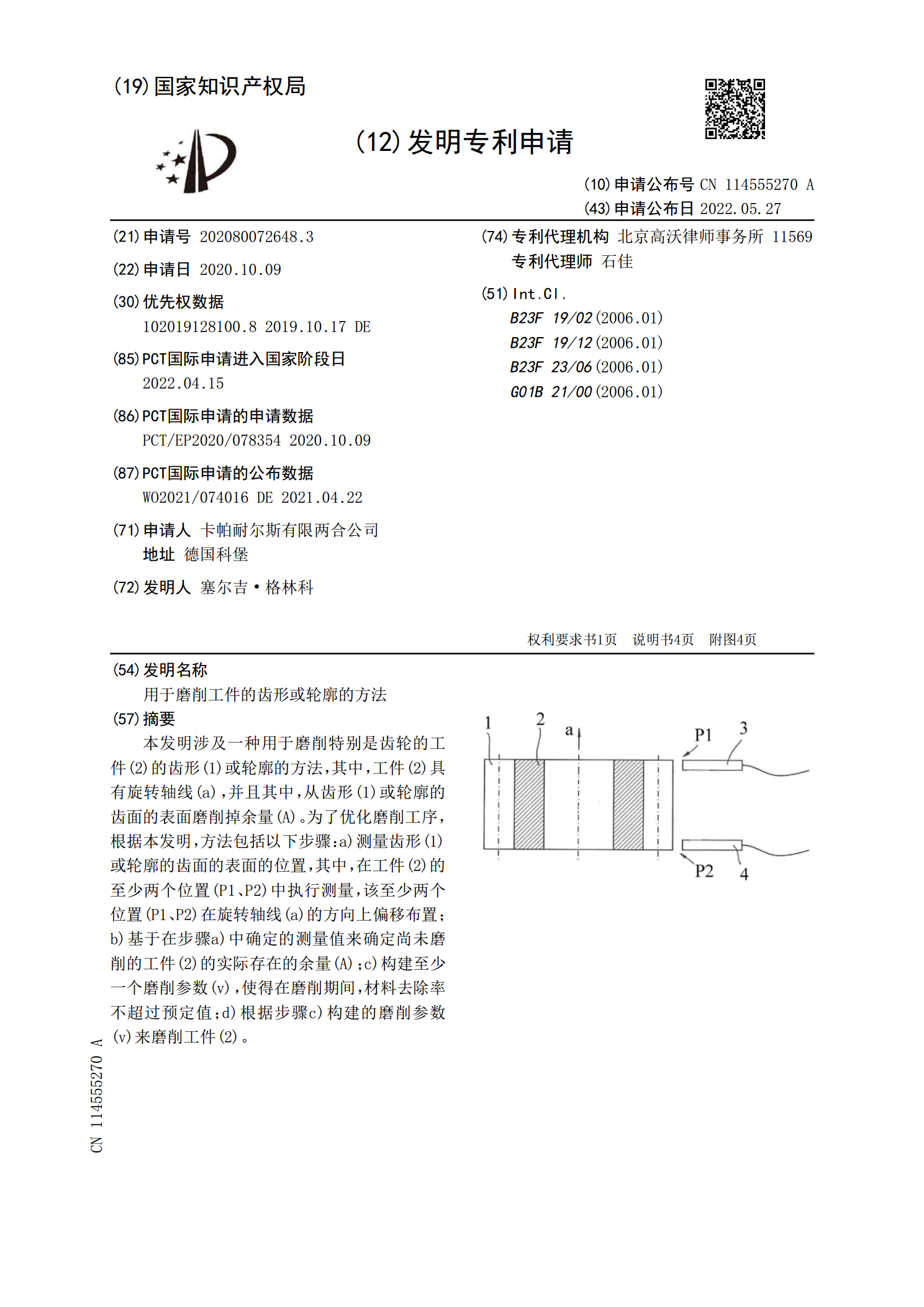
本发明涉及一种用于磨削特别是齿轮的工件(2)的齿形(1)或轮廓的方法,其中,工件(2)具有旋转轴线(a),并且其中,从齿形(1)或轮廓的齿面的表面磨削掉余量(A)。为了优化磨削工序,根据本发明,方法包括以下步骤:a)测量齿形(1)或轮廓的齿面的表面的位置,其中,在工件(2)的至少两个位置(P1、P2)中执行测量,该至少两个位置(P1、P2)在旋转轴线(a)的方向上偏移布置;b)基于在步骤a)中确定的测量值来确定尚未磨削的工件(2)的实际存在的余量(A);c)构建至少一个磨削参数(v),使得在磨削期间,材料
一种工件外轮廓面检测工装及其检测方法.pdf
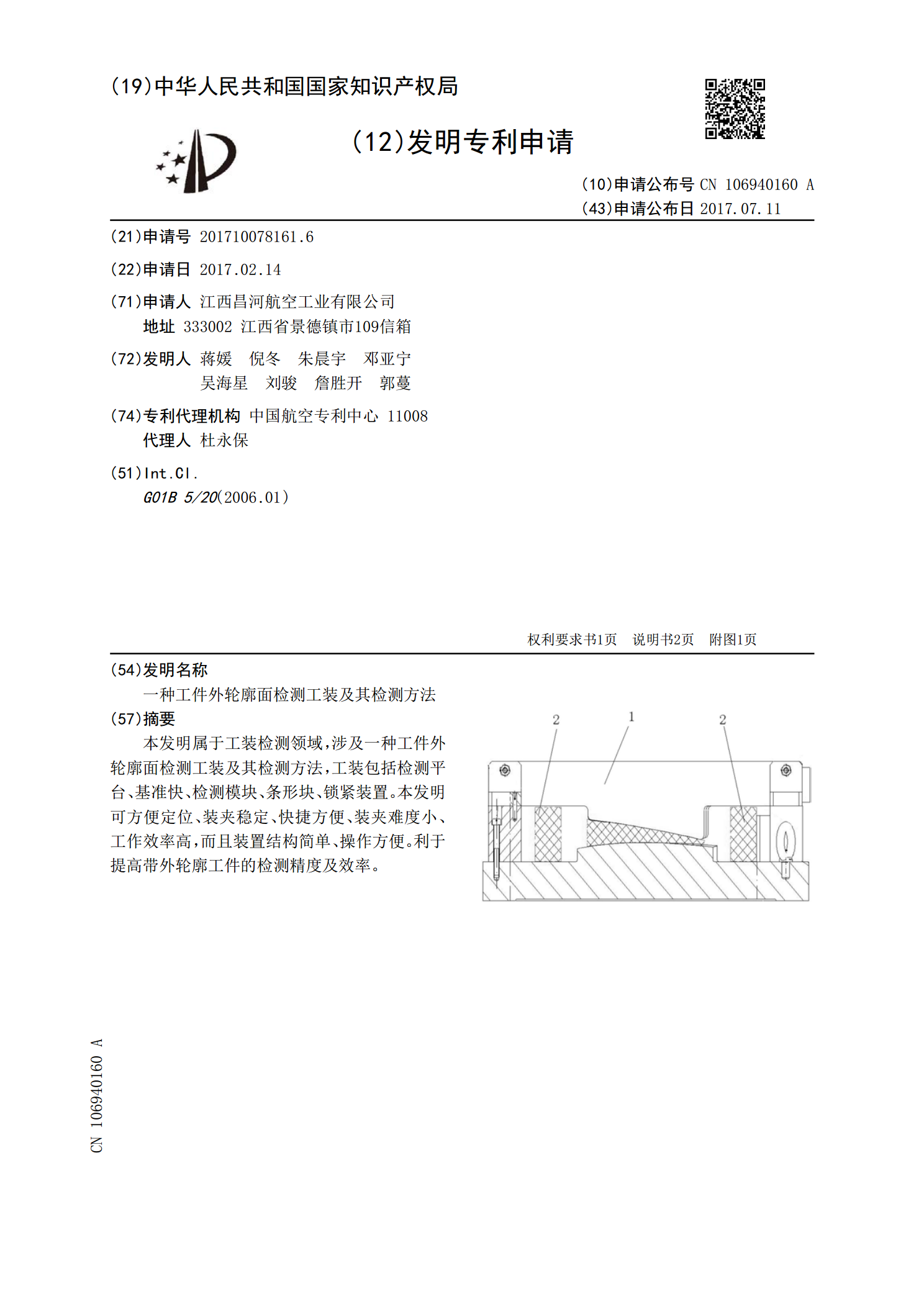
本发明属于工装检测领域,涉及一种工件外轮廓面检测工装及其检测方法,工装包括检测平台、基准快、检测模块、条形块、锁紧装置。本发明可方便定位、装夹稳定、快捷方便、装夹难度小、工作效率高,而且装置结构简单、操作方便。利于提高带外轮廓工件的检测精度及效率。