
一种新型防跌助行器.pdf

是你****盟主


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型防跌助行器.pdf
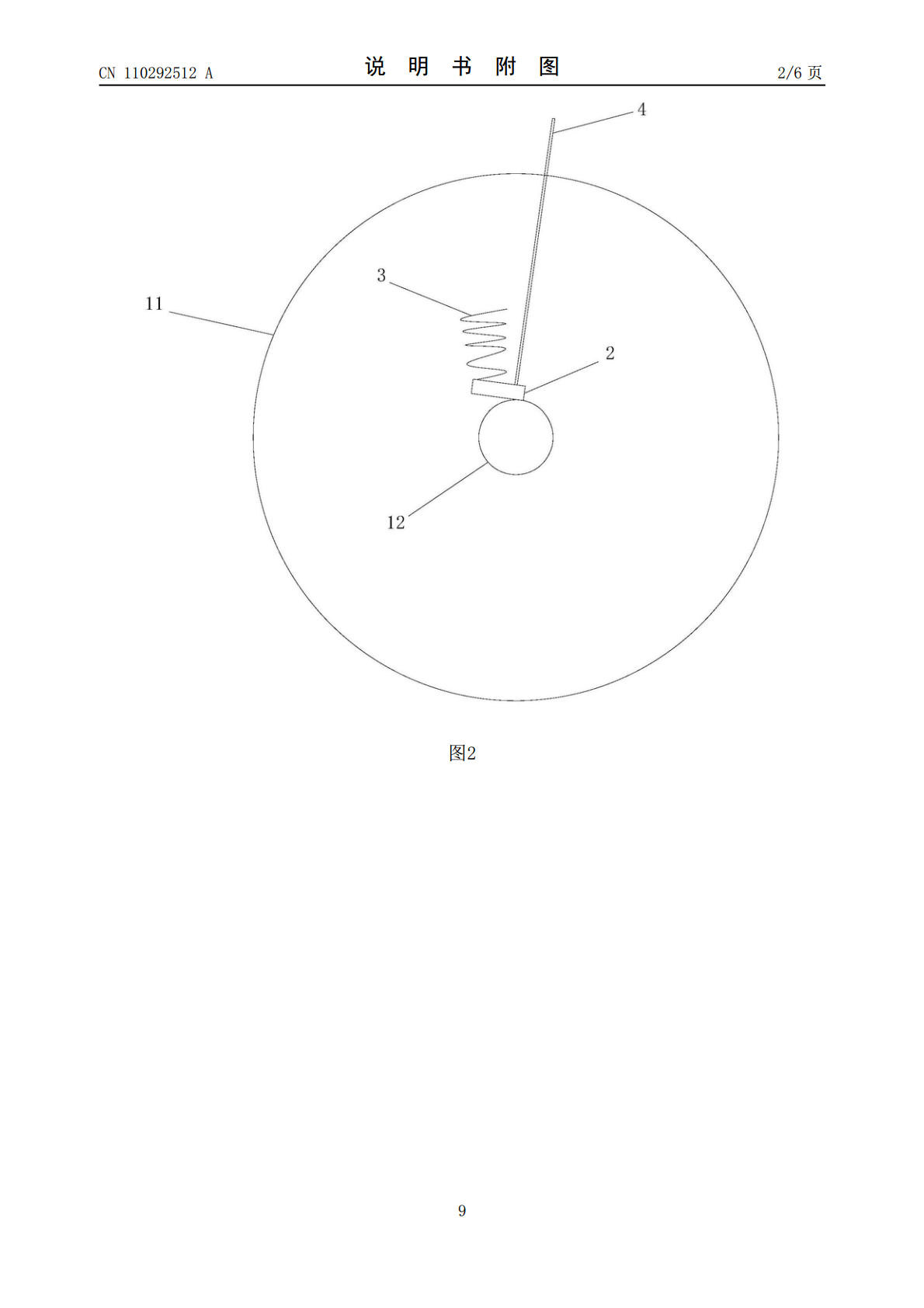
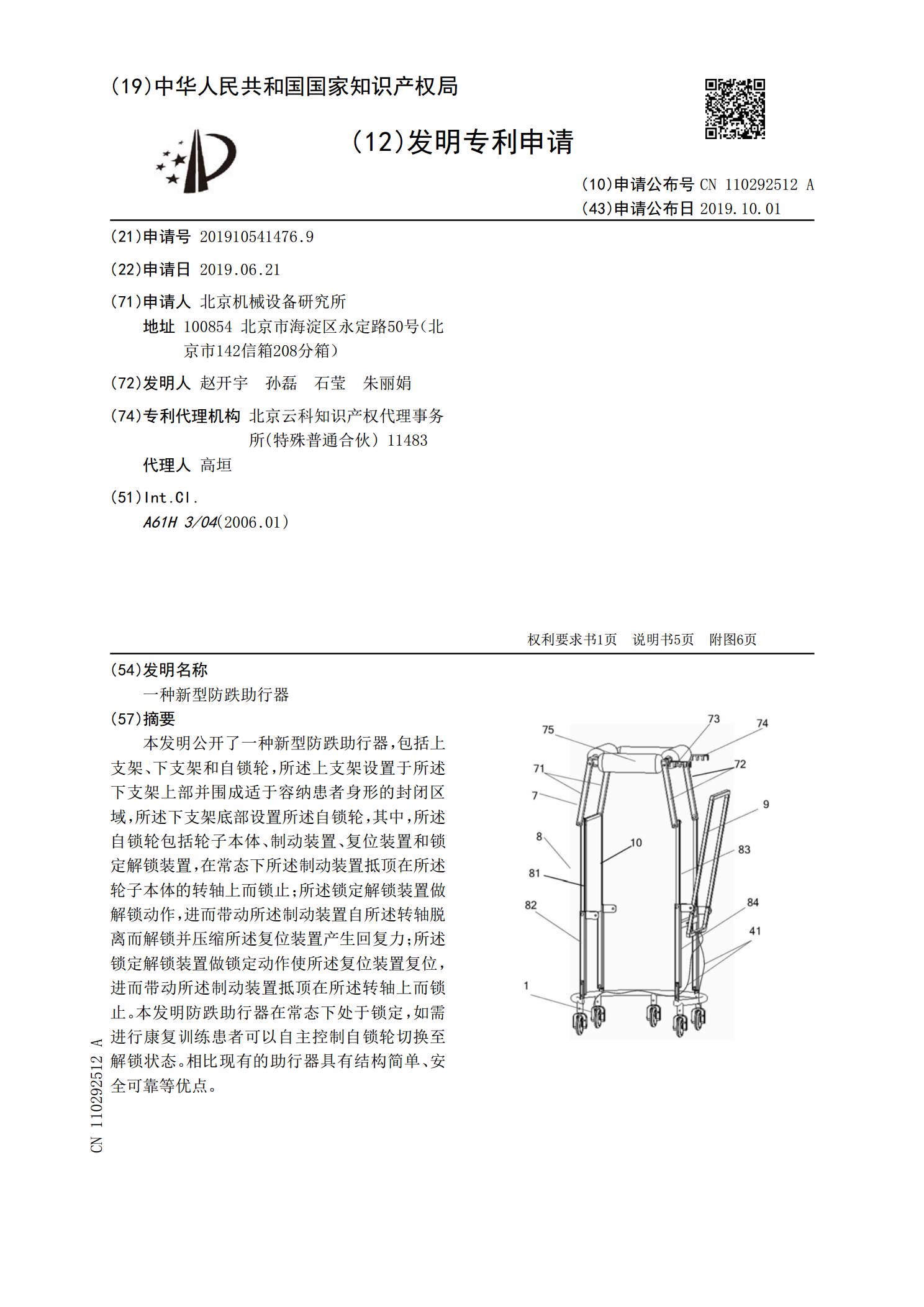
本发明公开了一种新型防跌助行器,包括上支架、下支架和自锁轮,所述上支架设置于所述下支架上部并围成适于容纳患者身形的封闭区域,所述下支架底部设置所述自锁轮,其中,所述自锁轮包括轮子本体、制动装置、复位装置和锁定解锁装置,在常态下所述制动装置抵顶在所述轮子本体的转轴上而锁止;所述锁定解锁装置做解锁动作,进而带动所述制动装置自所述转轴脱离而解锁并压缩所述复位装置产生回复力;所述锁定解锁装置做锁定动作使所述复位装置复位,进而带动所述制动装置抵顶在所述转轴上而锁止。本发明防跌助行器在常态下处于锁定,如需进行康复训练

一种防跌助行器.pdf
本发明公开了一种防跌助行器,包括上支架、下支架和自锁轮,所述上支架设置于所述下支架上部并围成适于容纳患者身形的封闭区域,所述下支架底部设置所述自锁轮,其中,所述自锁轮包括轮子本体、制动装置、复位装置和锁定解锁装置,在常态下所述复位装置在自身弹性作用力下使所述制动装置抵顶在所述轮子本体的制动面上而锁止,在解锁状态下所述锁定解锁装置动作带动所述制动装置自所述制动面脱离而解锁。本发明防跌助行器在常态下处于锁定,如需进行康复训练患者可以自主控制自锁轮切换至解锁状态。相比现有的助行器具有结构简单、安全可靠等优点。
一种具有防跌功能的助行器.pdf
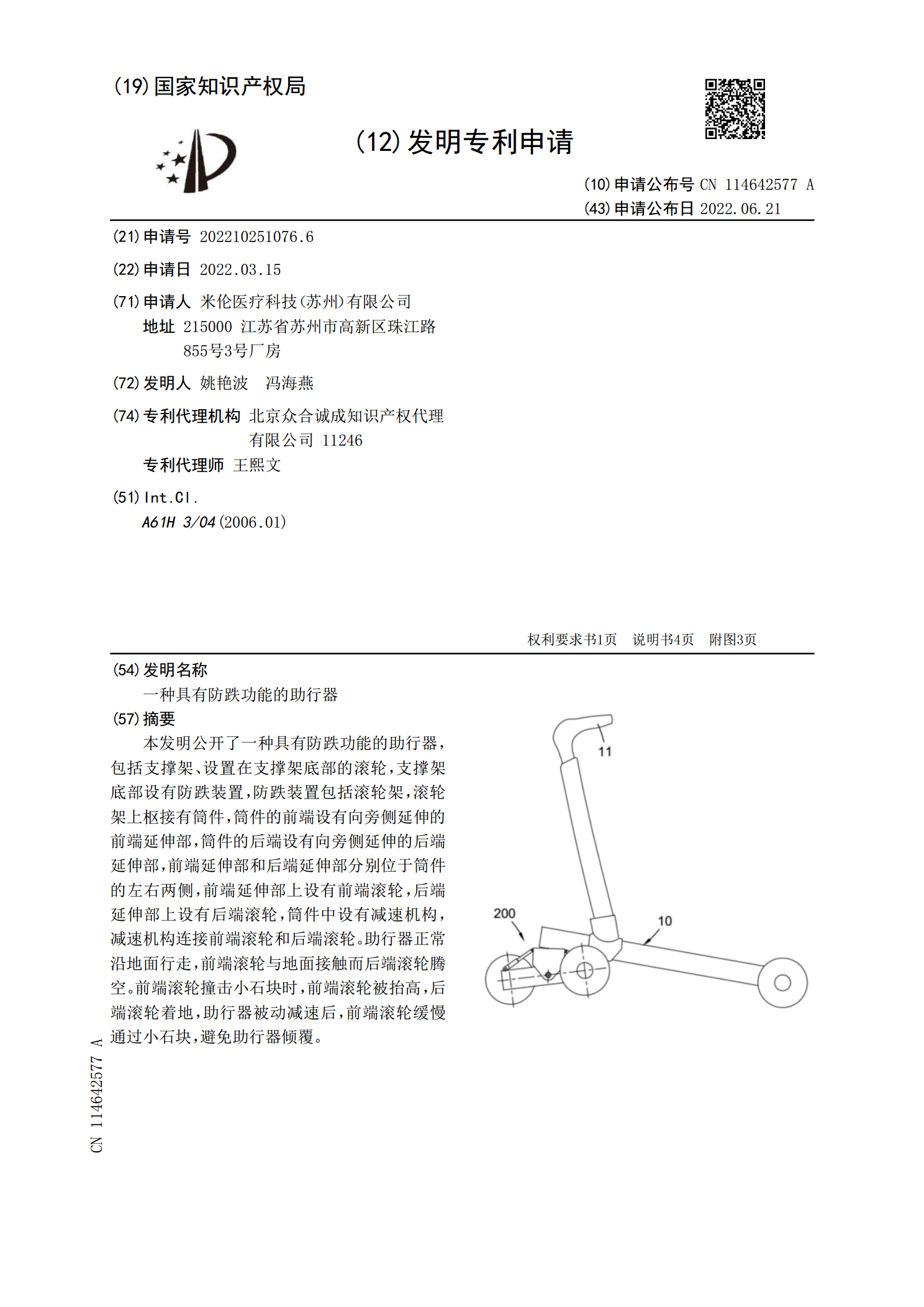
本发明公开了一种具有防跌功能的助行器,包括支撑架、设置在支撑架底部的滚轮,支撑架底部设有防跌装置,防跌装置包括滚轮架,滚轮架上枢接有筒件,筒件的前端设有向旁侧延伸的前端延伸部,筒件的后端设有向旁侧延伸的后端延伸部,前端延伸部和后端延伸部分别位于筒件的左右两侧,前端延伸部上设有前端滚轮,后端延伸部上设有后端滚轮,筒件中设有减速机构,减速机构连接前端滚轮和后端滚轮。助行器正常沿地面行走,前端滚轮与地面接触而后端滚轮腾空。前端滚轮撞击小石块时,前端滚轮被抬高,后端滚轮着地,助行器被动减速后,前端滚轮缓慢通过小石
一种新型助行器.pdf
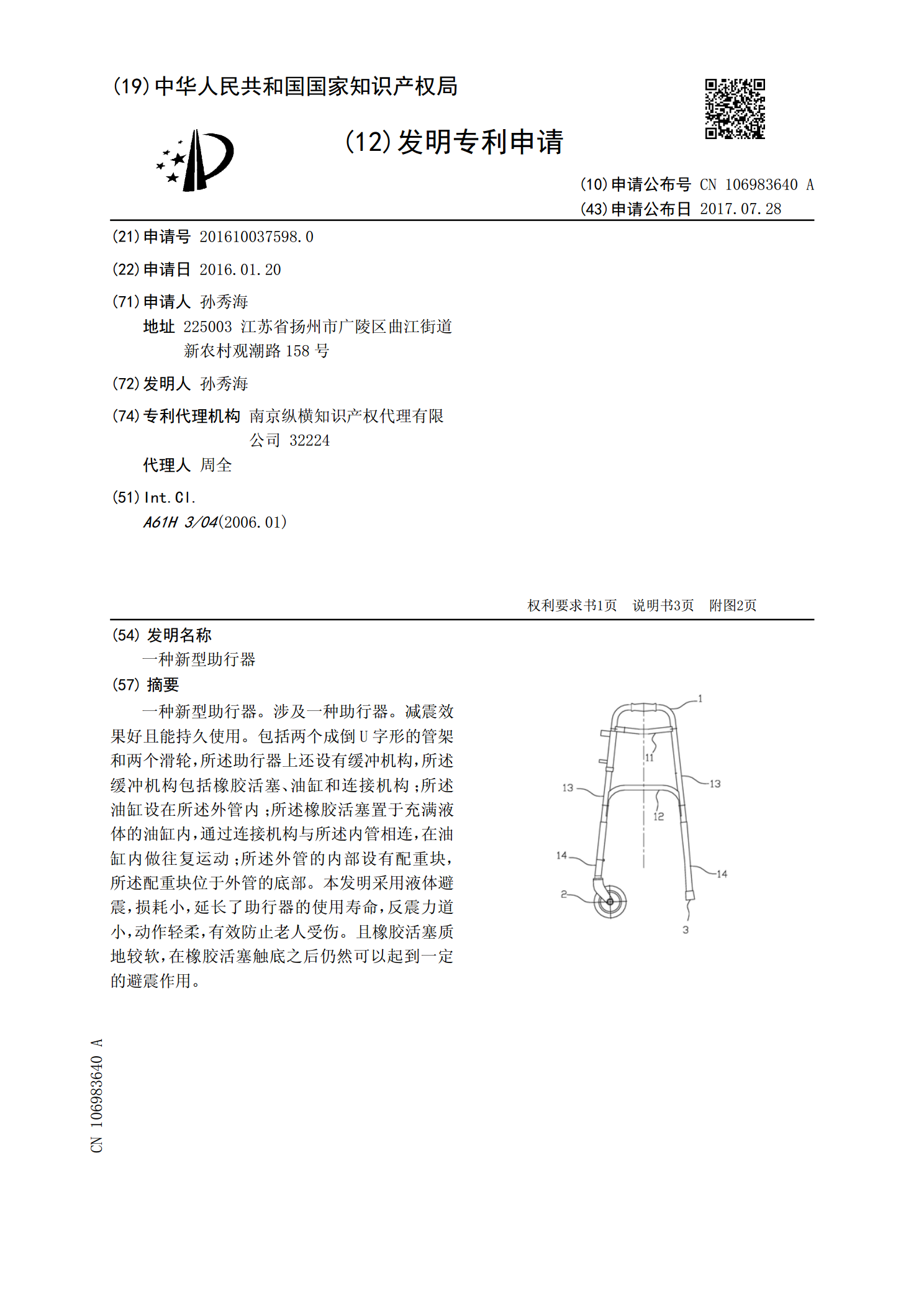
一种新型助行器。涉及一种助行器。减震效果好且能持久使用。包括两个成倒U字形的管架和两个滑轮,所述助行器上还设有缓冲机构,所述缓冲机构包括橡胶活塞、油缸和连接机构;所述油缸设在所述外管内;所述橡胶活塞置于充满液体的油缸内,通过连接机构与所述内管相连,在油缸内做往复运动;所述外管的内部设有配重块,所述配重块位于外管的底部。本发明采用液体避震,损耗小,延长了助行器的使用寿命,反震力道小,动作轻柔,有效防止老人受伤。且橡胶活塞质地较软,在橡胶活塞触底之后仍然可以起到一定的避震作用。

一种新型改良助行器.pdf
本发明提供了一种新型改良助行器,包括两个对称设置的扶手架,两个扶手架之间通过两个连接杆固定连接,每个扶手架包括外架体、脚踏板、手握架和手握杆,脚踏板固定于两支腿的下部之间,每个支腿的底部连接有万向轮和液压缸,顶板的中部且紧靠着阶梯结构的位置固定有海绵垫,每个海绵垫的两侧均固定有两个手握架,手握架高出海绵垫的高度,手握杆固定在阶梯结构靠近海绵垫的边缘处。本发明可以切换多种手握方式,能够利用肘部的力量施力,并且增加了腋下的支撑机构,能够更加省力,夜晚或者光线不足的时候可以提供照明功能,方便实用。